完整的PPT文档在这里:详述GPS原理及RTK技术应用
1.GPS概述
1.1定义
全球定位系统GPS(Global Position System),全称为NAVSTAR GPS(NAVigation Satellite Timing And Ranging Global Position System,导航星测时与测距全球定位系统)。
GPS是一个由美国国防部开发的空基全天候导航系统,它用以满足军方在地面或近地空间内获取在一个通用参照系中的位置、速度和时间信息的要求。
是一种可以授时和测距的空间交会定点的导航系统,可向全球用户提供连续、实时、高精度的三维位置,三维速度和时间信息。

1.2四大卫星定位系统
目前世界上有4大卫星定位系统。分别是:北斗卫星导航系统 (BDS)、伽利略卫星导航系统 (GALILEO)、GLONASS以及GPS。
GPS
GPS是在美国海军导航卫星系统的基础上发展起来的无线电导航定位系统。具有全能性、全球性、全天候、连续性和实时性的导航、定位和定时功能,能为用户提供精密的三维坐标、速度和时间。现今,GPS共有在轨工作卫星31颗,其中GPS-2A卫星10颗,GPS-2R卫星12颗,经现代化改进的带M码信号的GPS-2R-M和GPS-2F卫星共9颗。根据GPS现代化计划,2011年美国推进了GPS更新换代进程。GPS-2F卫星是第二代 GPS向第三代GPS过渡的最后一种型号,将进一步使GPS提供更高的定位精度。
GLONASS
GLONASS是由原苏联国防部独立研制和控制的第二代军用卫星导航系统,该系统是继GPS后的第二个全球卫星导航系统。GLONASS系统由卫星、地面测控站和用户设备三部分组成,系统由21颗工作星和3 颗备份星组成,分布于3 个轨道平面上,每个轨道面有8 颗卫星,轨道高度1万9000公里,运行周期11小时15分。GLONASS系统于20世纪70年代开始研制,1984年发射首颗卫星入轨。
GALILEO
伽利略卫星导航系统 (GALILEO)是由欧盟研制和建立的全球卫星导航定位系统,该计划于1992年2月由欧洲委员会公布,并和欧空局共同负责。系统由30颗卫星组成,其中27颗工作星,3颗备份星。卫星轨道高度为 23616km,位于3个倾角为56°的轨道平面内。2012年10月,伽利略全球卫星导航系统第二批两颗卫星成功发射升空,太空中已有的4颗正式的伽利略卫星,可以组成网络,初步实现地面精确定位的功能GALILEO系统是世界上第一个基于民用的全球导航卫星定位系统。
北斗卫星导航系统 (BDS)
北斗卫星导航系统 (BDS)是中国自主研发、独立运行的全球卫星导航系统。该系统分为两代,即北斗一代和北斗二代系统。我国上世纪80年代决定建设北斗系统,2003年,北斗卫星导航验证系统建成。该系统由4颗地球同步轨道卫星、地面控制部分和用户终端三部分组成。
2.GPS系统组成

2.1GPS空间部分
GPS空间部分主要由24颗GPS卫星构成,其中21颗工作卫星,3颗在轨备用卫星。
24颗卫星均匀分布在6个轨道平面内,轨道倾角55°,各个轨道平面之间相距60度,即轨道的升交点齿经各相差60度。每个轨道平面内各颗卫星之间的升交角距相差90度,一轨道平面上的卫星比西边相邻轨道平面上的相应卫星超前30度。
轨道高度:远地点:26560km,近地点:20200km
运行周期:11小时58分(恒星时)
保证在24小时,在高度角15°以上,能够同时观测到4到8颗卫星
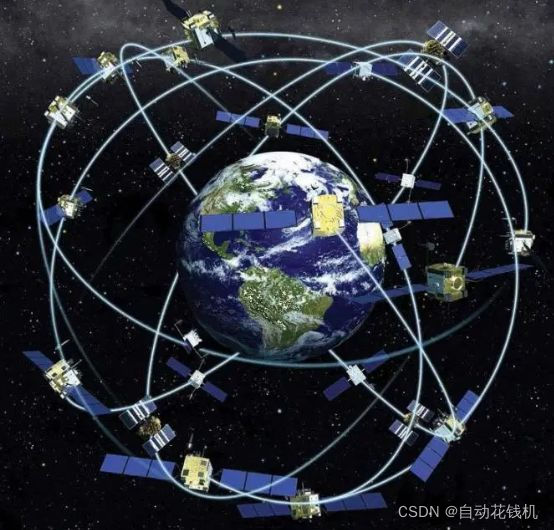 GPS卫星星座空间图
GPS卫星星座空间图
 GPS卫星星座平面图
GPS卫星星座平面图
2.2地面监控系统
组成:主控站(1个) 监测站(5个) 注入站(3个)
作用: 监测和控制卫星运行,编算卫星星历(导航电文),保持系统时间。

主控站:从各个监控站收集卫星数据,计算出卫星的星历和时钟修正参数等,并通过注入站注入卫星;向卫星发布指令,控制卫星,当卫星出现故障时,调度备用卫星。
监控站:接收卫星信号,检测卫星运行状态,收集天气数据,并将这些信息传送给主控站。
注入站:将主控站计算的卫星星历及时钟修正参数等注入卫星。

分布情况
主控站:位于美国科罗拉多州(Calorado)的法尔孔(Falcon)空军基地。
监控站:1个与主控站在一起;3个与注入站在一起;另外一个在Hawaii,西太平洋。
注入站:阿松森群岛(Ascendion),大西洋;迭戈加西亚(Diego Garcia),印度洋;卡瓦加兰(Kwajalein),东太平洋。
2.3GPS信号接收器
如车载,船载GPS导航仪,内置GPS功能的移动设备,GPS测绘设备等,GPS接收器主要由GPS芯片构成
任务:能够捕获到按一定卫星高度截止角所选择的待测卫星的信号,并跟踪这些卫星的运行,对所接收到的GPS信号进行变换、放大和处理,以便测量出GPS信号从卫星到接收机天线的传播时间,解译出GPS卫星所发送的导航电文,实时的计算出测站的三维位置,甚至三维速度和时间。

GPS卫星定位车载终端
概述
GPS卫星定位车载终端设备是GPS车辆监控管理系统的前端设备,安装在被监控的车辆上。GPS卫星定位车载终端还可以非常隐秘地安装在各种车辆内部,同时与车辆本身的油路、电路、门磁及车上的防盗器相连,可对车辆进行全方位的掌控。
组成
由GPS接收机,GSM/GPRS收发模块,主控制模块及汽车防盗器、外接探头等各种外接设备共同组成。
原理
GPS模块接收卫星的定位信号运算出自身的位置(经度、纬度、高度)、时间和运动状态(速度、航向),每秒1次送给单片机并存储,以便随时提供定位信息。MCU单片机控制整个车载终端设备的协调工作。GSM/GPRS模块负责无线数据的收发传输。并通过FSK对数据的调制解调,接收中心的指令数据和发射车载台的报警等信息。
语音控制部分
用于控制免提话筒耳机,监听MIC,FSK调制解调信号的缓冲,放大,匹配,转换等功能
数字逻辑控制部分
用于各种输入,输出的电平,脉冲信号的缓冲与驱动。
电源及省电控制部分
用于对汽车电平与后备电平的自动切换,稳压滤波并通过车匙及报警器的触发控制睡眠与苏醒。
汽车防盗器部分
负责对各探头的采集分析完成盗车报警的所有功能。双控熄火/断油路控制器受控于监控中心及汽车报警器。
3.GPS定位技术
3.1定位方法
WGS-84坐标系
具体定义参数
GCS_WGS_1984
WKID: 4326 Authority: EPSG
Angular Unit: Degree (0.0174532925199433)
Prime Meridian: Greenwich (0.0)
Datum: D_WGS_1984
Spheroid: WGS_1984
Semimajor Axis: 6378137.0
Semiminor Axis: 6356752.314245179
Inverse Flattening: 298.257223563
通过参数描述,我们知道WGS-84是一个长半轴(a)为6378137,短半轴(b)为6356752.314245179的椭球体,扁率(f)为298.257223563,f=(a-b)/a。

WGS-84是地心坐标系,空间直角坐标系,原点与地球质心重合,为GPS采用的坐标系;通过GPS可以直接获取WGS-84下的坐标(B,L,H),B为纬度,L为经度,H为大地到WGS-84椭球面的高度;我国采用的是北京1954或西安1980坐标系下的高斯投影坐标(x,y),也有采用北京1954或西安1980坐标系下的经纬度坐标(B,L),高程一般为海拔高度h。
 空间直角坐标系的高斯投影转换
空间直角坐标系的高斯投影转换
3.2定位原理
3.2.1绝对定位原理
以地球质心为参考点,利用GPS独立确定用户接收机天线(观测站)在WGS-84坐标系中的绝对位置,又称为单点定位。
优点:一台接收机单独定位,观测简单,可瞬时定位
缺点:精度主要受系统性偏差的影响,定位精度低

3.2.2相对定位原理
将两台接收机分别安置在基线的两个端点,其位置静止不动,并同步观测相同的4颗以上GPS卫星,确定基线两个端点在协议地球坐标系中的相对位置,这种定位模式称为相对定位。

3.2.3静态相对定位
将几台GPS接收机安置在基线端点上,保持固定不动,同步观测4颗以上卫星。可观测数个时段,每时段观测十几分钟至1小时左右。最后将观测数据输入计算机,经软件解算得各点坐标。
3.2.4动态相对定位
先建立一个基准站,并在其上安置接收机连续观测可见卫星,另一台接收机在第1点静止观测数分钟后,在其他点依次观测数秒。最后将观测数据输入计算机,经软件解算得各点坐标。动态相对定位的作业范围一般不能超过15km。
4.GPS实时动态定位技术RTK
4.1概述
RTK(Real-Time-Kinematic)技术是GPS实时载波相位差分的简称。这是一种将GPS与数传技术相结合,实时解算并进行数据处理,在1~2秒时间内得到高精度位置信息的技术。与动态定位方法相比,定位模式相同,仅要在基准站和流动站间增加一套数据链,实现各点坐标的实时计算、实时输出。
这是一种新的常用的卫星定位测量方法,以前的静态、快速静态、动态测量都需要事后进行解算才能获得厘米级的精度,而RTK是能够在野外实时得到厘米级定位精度的测量方法。RTK测量采用了载波相位动态实时差分方法,是GPS应用的重大里程碑,它的出现为工程放样、地形测图,各种控制测量带来了新的测量原理和方法,极大地提高了作业效率。
原理图如下:

4.2工作原理
将一台接收机置于基准站上,另一台或几台接收机置于载体(流动站)上,基准站和流动站同时接收同一时间、同一GPS卫星发射的信号,基准站所获得的观测值与已知位置信息进行比较,得到GPS差分改正值。然后将这个改正值通过无线电数据电台及时传递给共视卫星的流动站精化其GPS观测值,从而得到经差分改正后流动站较准确的实时位置。
基准站建在已知或未知点上;基准站接收到的卫星信号通过无线通信网实时发给用户;用户接收机将接收到的卫星信号和收到基准站信号实时联合解算,求得基准站和流动站间坐标增量(基线向量)。站间距30公里,平面精度1-2厘米
高精度的GPS测量必须采用载波相位观测值,RTK定位技术就是基于载波相位观测值的实时动态定位技术,它能够实时地提供测站点在指定坐标系中的三维定位结果,并达到厘米级精度。
总结:RTK就是实时动态差分测量,其原理简单来说就是,基准站用一个固定坐标来做参考,以后基站每通过接收卫星算得一个坐标,就跟固定坐标作比对,得到差值,然后将这个差值发送给移动站,移动站用卫星接收到的坐标再减去基站发过来的差值就得到了改正后的坐标。

4.3RTK系统基准站
组成:基准站GPS接收机及卫星接收天线、无线电数据链电台及发射天线、直流电源
作用:求出GPS实时相位差分改正值,然后将改正值通过数传电台及时传递给流动站精化其GPS观测值,从而得到更为精确的实时位置。
关键因素:无线电数据链的稳定性和作用距离是否满足要求,它与无线电数据链电台本身的性能、发射天线类型、参考站的选址、设备架设情况以及无线电电磁环境等有关。
避免干扰:大于25W的数据链电台的发射天线,应距离GPS接收天线至少2m,最好在6m以上;发射天线与电台的连接电缆必须展开,以免形成新的干扰源。
4.4RTK流动站
组成:UHF电台,TSC1控制器,数据链电台
作用:流动站的UHF电台接收基准站的信号,同时也接收相同的卫星信号,用配备的TSC1控制器进行实时解算。 流动站数据链电台的功率为2W 基准站GPS接收机与TRIMMRKII电台之间的数据传输波特率为38400,TRIMMRKII电台与流动站GPS接收机之间的数据传输波特率为4800,流动站中的UHF数据链电台与流动站GPS接收机之间的数据传输波特率为38400。
4.5应用中的问题
GPS实时差分定位RTK技术的缺点
- 用户需要架设本地参考站
- 定位误差随距离的增长而增大
- 误差增长使流动站和基准站的作业距离受到限制
- 在RTK作业过程中,由于受作业距离的限制,GPS技术固有条件的限制(参考站和流动站之间必须没有山体、楼群之类的遮挡,作业区域不能存在强烈的电磁波干扰),需要不断移动基准站,架设中继站,作业效率低,工作繁琐,且由于数据通讯的原因影响了单基准站RTK的定位精度和质量,可靠性和可行性也随距离而降低
- GPS接收机的性能要高,确保长基线进行正确整周未知数求解
- 数据链的性能要好,传送距离要远,能正确无误的将参考站数据发送到流动站
实际应用中受到的限制
由于RTK技术局限性的存在,使得其在实际应用中受到了限制,常规RTK作业时,流动站GPS接收机接收到基准站的差分信号后,首先出现的是浮动解结果,经过一段时间的观测和计算后得到固定解结果,这段时间被称为初始化时间,其与作业期间的观测卫星数、卫星分布状况、与基准站的距离和观测环境等都有关系。
4.6移动站的解算状态
固定解:当使用载波相位观测值定位的时候,会产生模糊度,模糊度理论上是整数。通过算法解出整数的模糊度之后,会大幅度提高定位精度。
浮点解:有的时候解不出整数所得到的解。
单点解:接收机未使用任何差分改正信息计算的3D坐标。
移动站的解算状态分为固定解、浮点解、差分解及单点解。
对固定解而言,其定位精度在1厘米以内,可满足除首级控制测量及其他高精度要求的测绘工作以外的各种比例尺的地形图测绘、施工放样及图根点测量等。
如果浮点解的定位精度小于0.5米,根据经验其平面和高程误差一般在0.1-0.3米,可满足精度要求不大于0.5米的测绘工作;定位精度若大于0.5米,平面和高程误差一般在1-3米。分解和单点解的定位精度一般在5-10米之间,有时还会更大,一般不采用。
但对于不接收基准站信号的情况下的单点解,若使用离测区最近区域的校正参数作为转换参数,一般平面误差在1-5米,可用来寻找控制点,但高程相差很大,不能利用。
总之就是,固定解精确度大于浮点解大于单点解。
想要提高RTK的作业精度主要通过减少人为因素的影响。
同时在施工作业中,根据不同的精度要求,合理利用移动站不同的解算精度,在保证作业精度要求的同时又提高了工作效率。
5.GPS网络RTK技术(VRS系统)
5.1简述
具有实时定位服务功能的虚拟参考站卫星定位服务系统VRS(Virtual Reference Station)是当今GPS技术发展的热点之一,由于VRS系统突破了常规GPS差分作业系统分散、相互独立、临时性基准站频繁设置等问题,在各行各业中得到了广泛应用。深圳虚拟参考站卫星定位服务系统是我国第一个实时型VRS,该系统是在计算机城域网上建立的现代化城市大地测量网络服务系统,由卫星跟踪基准站,系统控制中心,用户数据中心,实时数据通信网络等组成,可全天候地向深圳地区用户提供厘米级实时和快速定位,毫米级事后精密定位等服务。
5.2原理
VRS虚拟参考站技术,无需用户自己建立基准站,运用了GPS定位技术,Internet技术,无线通信技术,计算机网络管理技术。控制中心连续收几个参考站的原始观测数据,通过对所有基站数据处理消除周跳,减弱电离层、对流层、星历误差、多路径和噪声的影响,建立动态数据库,用户通过GSM向控制中心以NMEA格式发送用户位置信息,控制中心为用户建立虚拟参考站,控制中心以RTCM格式向用户发送虚拟参考站位置和模拟观测值,用户用虚拟观测站数据进行RTK结算。应用多个参考站的观测数据,连续监测多参考站的联合数据,在每一个用户的指定地点建立唯一的虚拟参考站,向用户发送RTCM或CMR+格式差分数据。就尤如日本的电子基准点,它就运用了VRS技术,VRS技术的运用,减少了测绘单位的投资,只需有移动站,而无需基准站,由控制中心为用户建立一个虚拟的基准站,因其通过对几个参考站的数据进行处理计算,所以精度比传统RIK的精度要高的多。应用领域也由GPS网络实现的虚拟参考站概念,使得许多应用得以更有效的实现。同时,在距参考站相当远的情况下用户再无需设立自己的基准站。
 VRS原理图
VRS原理图
5.3VRS系统作业优势
VRS系统的覆盖范围较大
VRS网络可以有多个站,但最少需要3个。与传统的GPS网络相比,VRS节约成本近70%。VRS系统可提供2种不同精度的差分信号,分别为厘米级和亚米级。我们所论述的是1-2厘米的高精度,若是用低精度,距离可以拓展到更广。
相对传统RTK,提高了精度
1PPM的概念没有了,在VRS网络控制范围内,精度始终在1-2厘米
可靠性提高
采用了多个参考站的联合数据,大大提高可靠性
更广的应用范围
城市规划,市政建设,交通管理,机械控制,气象,环保,农业以及所有在室外进行的勘测工作。
6.GPS_NMEA 0183协议
6.1RTKLIB
RTKLIB是日本东京海洋大学开发的一个开放源程序包,供标准与精确GNSS全球导航卫星系统应用。RTKLIB包括一个可移植的程序库和几个应用程序(AP)库。
特点
支持标准和精确的定位算法
GPS,GLONASS,QZSS准天顶卫星系统,北斗和SBAS
支持多种定位模式与GNSS实时和后处理
单点,DGPS/DGNSS,动态,静态,移动基线,定点,PPP运动,PPP静态和PPP定点
支持多种标准格式和协议GNSS
RINEX 2.10,2.11,2.12 OBS /NAV/ GNAV / HNAV,RINEX 3.00 OBS / NAV,RINEX 3.00CLK,RTCM V.2.3,V.3.1 RTCM 1.0,NTRIP,RTCA/DO-229C,NMEA 0183,SP3-C,IONEX 1.0,ANTEX 1.3,NGS PCV和EMS 2.0
6.2GPS_NMEA 0183协议
6.2.1概述
NMEA是National Marine Electronics Association 的缩写,是美国国家海洋电子协会的简称,现在是GPS导航设备统一的RTCM标准协议。
6.2.2GPS相关语句
NMEA-0183输出语句包括GGA、GSA、GSV、RMC、VTG、GLL,可通过GPS串口调试软件发送相应的命令语句给GPS OEM板,此后GPS OEM板会根据设置参数决定每隔若干毫秒发送哪种或哪几种NMEA语句。
GPGGA(GPS定位信息)
<1> UTC 时间,格式为hhmmss.sss;
<2> 纬度,格式为ddmm.mmmm(第一位是零也将传送);
<3> 纬度半球,N 或S(北纬或南纬)
<4> 经度,格式为dddmm.mmmm(第一位零也将传送);
<5> 经度半球,E 或W(东经或西经)
<6> 定位质量指示,0=定位无效,1=定位有效;
<7>使用卫星数量,从00到12(第一个零也将传送)
<8>水平精确度,0.5到99.9
<9>天线离海平面的高度,-9999.9到9999.9米M指单位米
<10>大地水准面高度,-9999.9到9999.9米M指单位米
<11>差分GPS数据期限(RTCMSC-104),最后设立RTCM传送的秒数量
<12>差分参考基站标号,从0000到1023(首位0也将传送)。
GPGSA(GPS经度及当前卫星信息)
<1>$GPGSA,语句ID,表明该语句为GPS DOP and Active Satellites(GSA)当前卫星信息
<2>定位模式,A=自动手动2D/3D,M=手动2D/3D
<3>定位类型,1=未定位,2=2D定位,3=3D定位
<4>PRN码(伪随机噪声码),第1信道正在使用的卫星PRN码编号(00)(前导位数不足则补0)
<5>PRN码(伪随机噪声码),第2信道正在使用的卫星PRN码编号(00)(前导位数不足则补0)
......
<14>PRN码(伪随机噪声码),第12信道正在使用的卫星PRN码编号(00)(前导位数不足则补0)
<15>PDOP综合位置精度因子(0.5 - 99.9)
<16>HDOP水平精度因子(0.5 - 99.9)
<17>VDOP垂直精度因子(0.5 - 99.9)
<18>校验值
GPGSV(可见卫星信息)
<1>总的GSV语句电文数
<2>当前GSV语句号
<3>可视卫星总数
<4>PRN码(伪随机噪声码) 也可以认为是卫星编号
<5>仰角(00~90度)
<6>方位角(000~359度)
<7>信噪比(00~99dB) (后面依次为第10,16,17号卫星的信息)
*总和校验域
总和校验数
(CR)(LF)回车,换行
GPRMC(推荐最小导航信息)
<1> UTC 时间,hhmmss(时分秒)格式
<2> 定位状态,A=有效定位,V=无效定位
<3>纬度ddmm.mmmm(度分)格式(前面的0也将被传输)
<4> 纬度半球N(北半球)或S(南半球)
<5>经度dddmm.mmmm(度分)格式(前面的0也将被传输)
<6> 经度半球E(东经)或W(西经)
<7>地面速率(000.0~999.9节,前面的0也将被传输)
<8>地面航向(000.0~359.9度,以真北为参考基准,前面的0也将被传输)
<9> UTC 日期,ddmmyy(日月年)格式
<10>磁偏角(000.0~180.0度,前面的0也将被传输)
<11> 磁偏角方向,E(东)或W(西)
<12>模式指示(仅NMEA01833.00版本输出,A=自主定位,D=差分,E=估算,N=数据无效)
GPVTG(地面速度信息)
<1> 以正北为参考基准的地面航向(000~359度,前面的0也将被传输)
<2> 以磁北为参考基准的地面航向(000~359度,前面的0也将被传输)
<3> 地面速率(000.0~999.9节,前面的0也将被传输)
<4> 地面速率(0000.0~1851.8公里/小时,前面的0也将被传输)
<5> 模式指示(仅NMEA0183 3.00版本输出,A=自主定位,D=差分,E=估算,N=数据无效
GPGLL(地面定位信息)
<1> 纬度
<2> N=北纬 S=南纬
<3> 经度
<4>E=东经 W=西经
<5> UTC时间
<6>状态位 A-数据有效 V-数据无效
<7>校验位
罗经


雷达


探测仪


风速计


ECDIS


完整的PPT文档在这里:详述GPS原理及RTK技术应用
参考文献:https://blog.csdn.net/u012411498/article/details/80716751
https://wenku.baidu.com/view/0fe84f7801f69e31433294fc.html?fr=xueshu20001
https://www.doc88.com/p-5754546428781.html?r=1
https://wenku.baidu.com/view/26fab25931126edb6e1a1058.html
https://zhidao.baidu.com/question/652846529616370045.html
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)