文章目录
- 前言
- 平面2R机器人
- 1. 问题假设
- 2. 建立运动学模型
- 1)DH参数法
- 2)指数积方法
- 3)雅可比矩阵(微分变换法)
- 4)逆运动学求解(几何法)
- 3. 建立动力学模型
- 4. 惯性张量与矩阵
-
前言

在先前的博客中,我们一起从机器人的研究方向出发,深入理解分析了机器人建模的作用,并通过仿真实战深刻领会了机器人运动学模型和动力学模型的多种建立方法,本文则主要从实际案例出发,分析平面2R机器人模型建立方法,使用DH模型方法建立运动学模型,并分别使用惯性张量和拉格朗日动力学方法建立动力学模型,具体过程见下文。
平面2R机器人
1. 问题假设
如下图所示,一个平面2R机器人,各关节力矩及广义坐标定义如图,两个连杆质量均匀分布,长度为1m,质量各为5kg,末端坐标为(x,y):

2. 建立运动学模型
1)DH参数法
注:DH模型方法具体介绍可见博客 机器人建模方法简述
| 连杆序号i | a_i-1 | α_i-1 | d_i | θ_i |
|---|
| 1 | 0 | 0 | 0 | θ_1 |
| 2 | 1 | 0 | 0 | θ_2 |
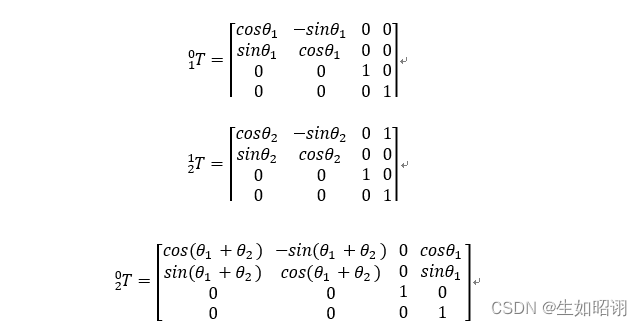
2)指数积方法
- 1. 建立基坐标系和末端坐标系,与DH相同即可
- 2. 求出初始时刻末端坐标系相对于基坐标系的位姿T(0)
- 3. 求出各关节运动旋量
- 4. 通过给初始位姿左乘运动旋量的矩阵指数得到运动学方程
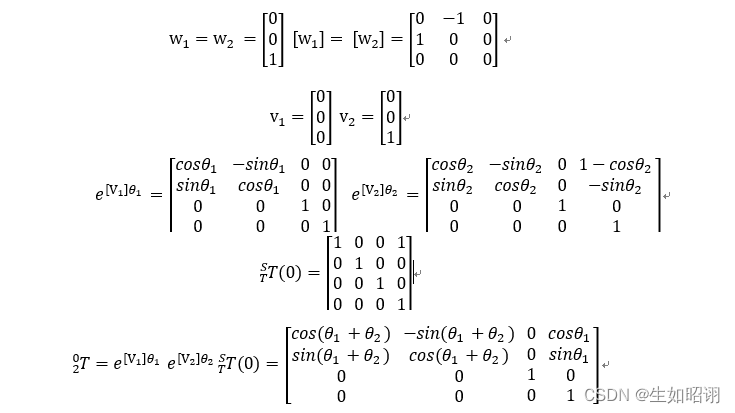
- 本质:和DH模型方法比较可知,二者得到了相同的运动学方程
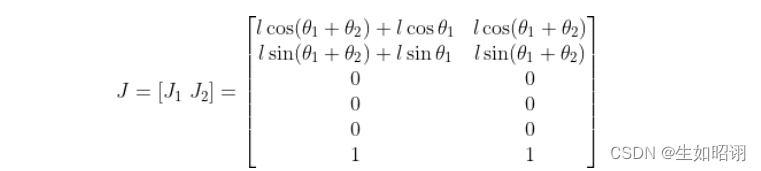
3)雅可比矩阵(微分变换法)
注:由于上述齐次变换矩阵是工具坐标系的结果,想要计算速度雅可比矩阵需要变换成末端执行器坐标系下计算,此时的坐标系如下图所示:

-
变换矩阵如下:

-
微分变换的基本原理:

-
更换坐标系下的雅克比矩阵转换:

-
最终结果如下:
4)逆运动学求解(几何法)
- 几何法求解逆运动学限制较多,但是对于平面2R机器人来说,由于连杆较少,几何关系明显,我们可以直接通过余弦定理等得出逆运动学结果:
1. 将坐标系逆时针旋转90度,方便进行计算,图示如下:

2. 在由两个连杆和虚线构成的钝角三角形中使用余弦定理得:

3. 关节角2的解如下:

4. 通过几何关系首先得γ角如下:

5. 关节角1的解:θ1 = β ± γ
3. 建立动力学模型
注:有关拉格朗日动力学方法的具体步骤的使用方法在先前的博客中同样有讲到,地址同上
设定笛卡尔坐标系,以图示θ1和θ2为广义坐标,τ1和τ2为关节驱动力矩
1. 连杆一:质心相对于原点不存在运动,只需计算转动动能

2. 连杆二:平动动能 + 转动动能
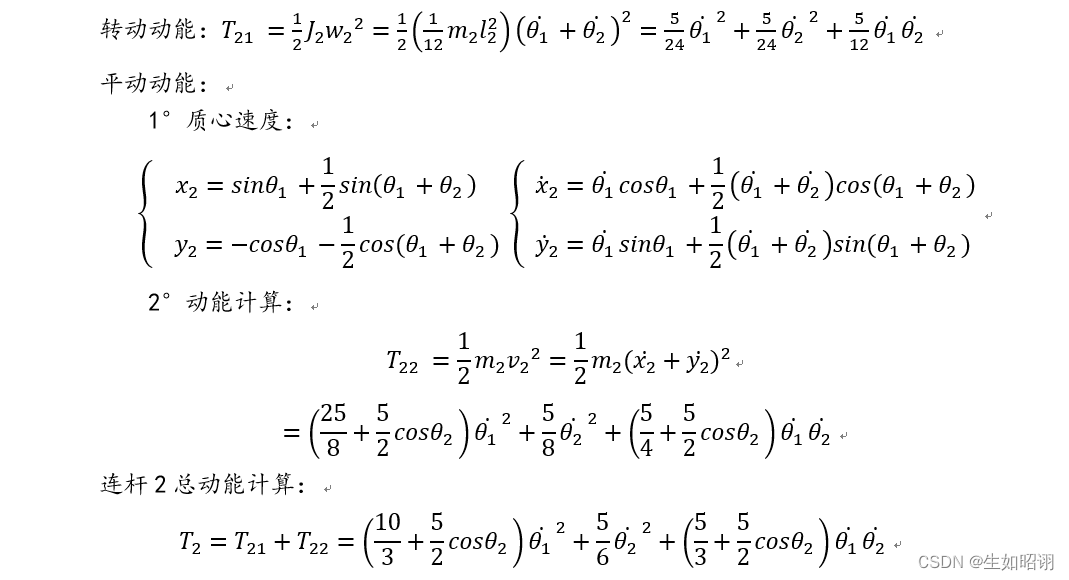


1. 基本形式:
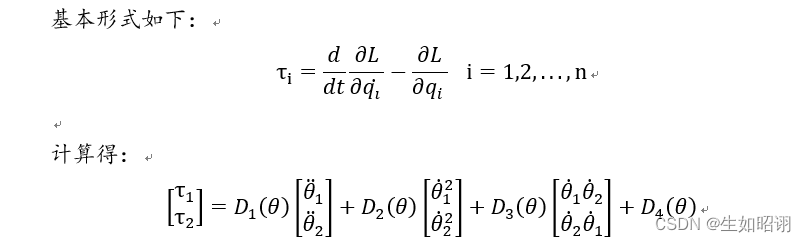
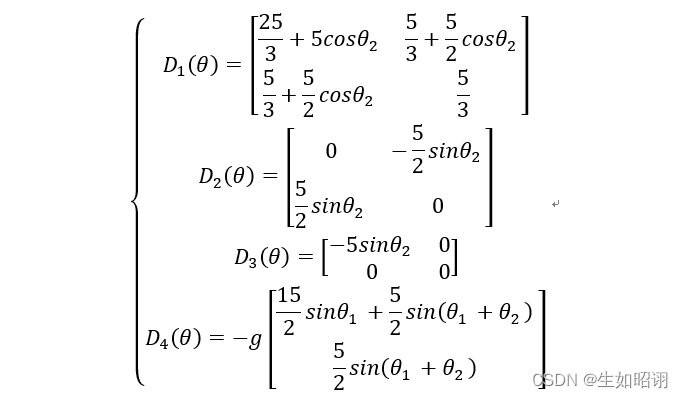
2. 各矩阵具体参数:
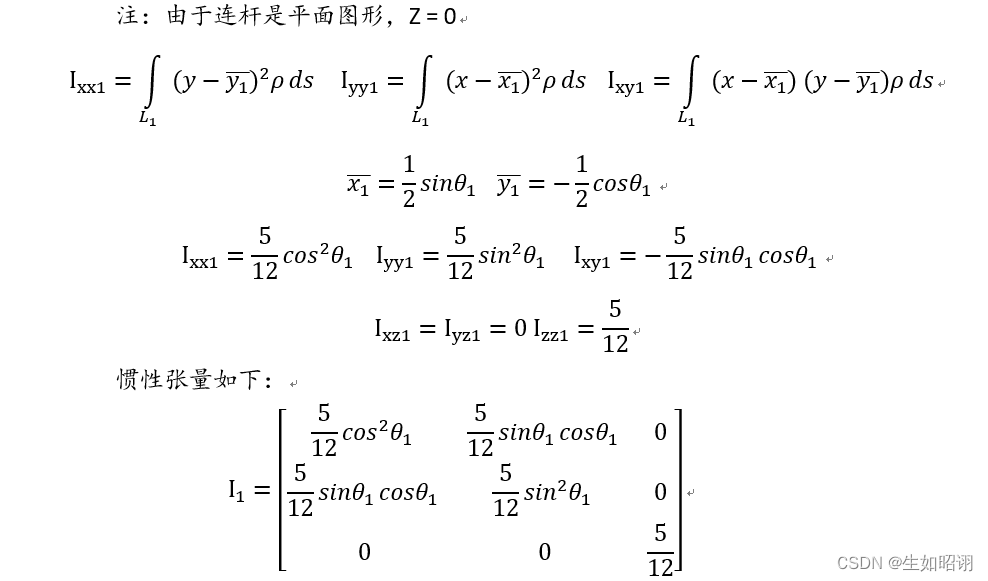
4. 惯性张量与矩阵
1)连杆绕质心的转动惯量
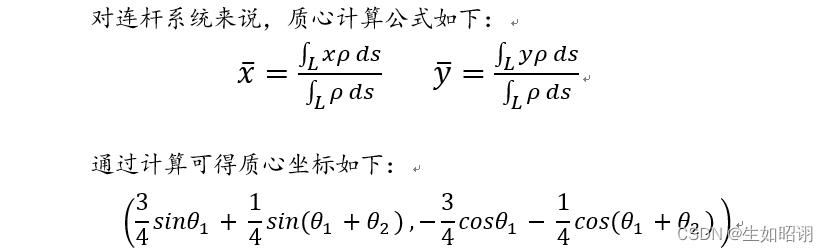
每根连杆绕各自质心的转动惯量求法相同:

1. 求连杆系统质心:
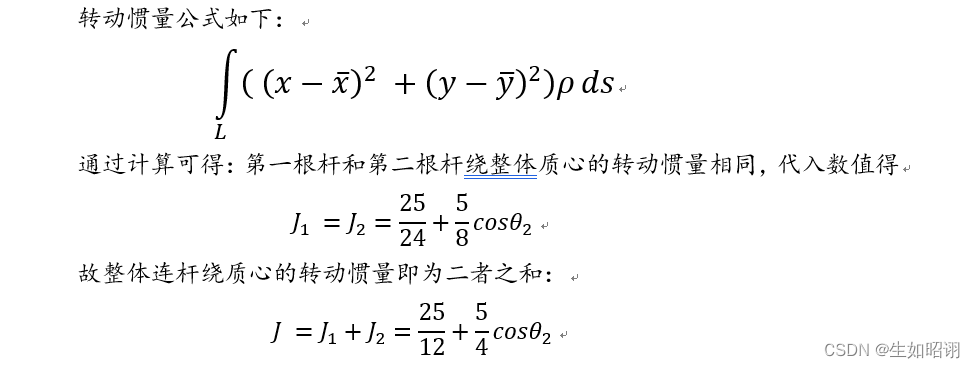
2. 根据质心计算转动惯量:
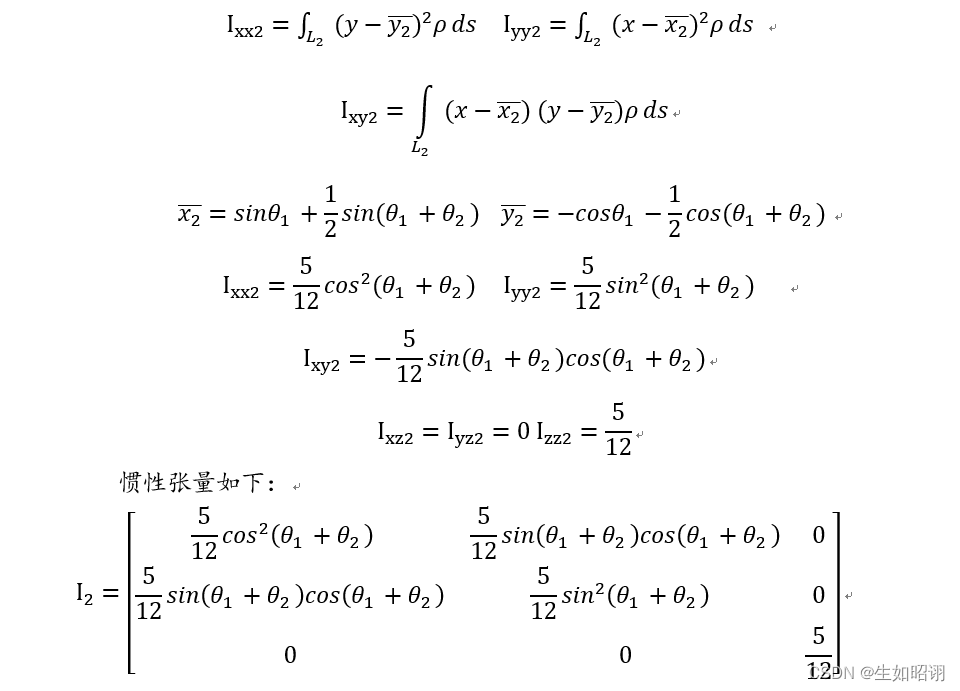
2)惯性矩阵
连杆一惯性矩阵:
连杆二惯性矩阵:
总结:惯性矩阵和动能之间满足如下关系:

本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)