Jetson Nano 4GB 常使用的电源连接方式有两种:
1. DC Power Jack (5.5×2.1mm) , 5V / 4A,需使用跳帽将脚位 J48 短路(图一红框处),电源连接方式请参照图一蓝框处。若一切正常, Jetson Nano 4GB 的电源指示灯将会常亮绿灯,请参照图一中的绿框处。

图一 Jetson Nano 4GB 使用 DC Power Jack 成功启动后的配置
2. USB, 5V / 2A ,搭配 MicroUSB 电源线,请注意脚位 J48 为开路状态(图二红框处),MicroUSB 电源线连接方式请参照图二蓝框处,若成功启动电源指示灯将会常亮绿灯,请参照图二中的绿框处。须注意若 MicroUSB 电源线过长以及有些 MicroUSB 电源线材质问题,都会容易导致 MicroUSB 端输出电压过低问题,使得 Jetson Nano 4GB 无法开机。

图二 Jetson Nano 4GB 使用 Micro USB 连接线成功启动后的配置
Jetson Nano 2GB 的电源连接处只有 USB Type-C ,支援 5V/3A 的电源输入,连接方式请参照图三的蓝框处,若成功启动电源指示灯将会常亮绿灯,请参照图三的绿框处。
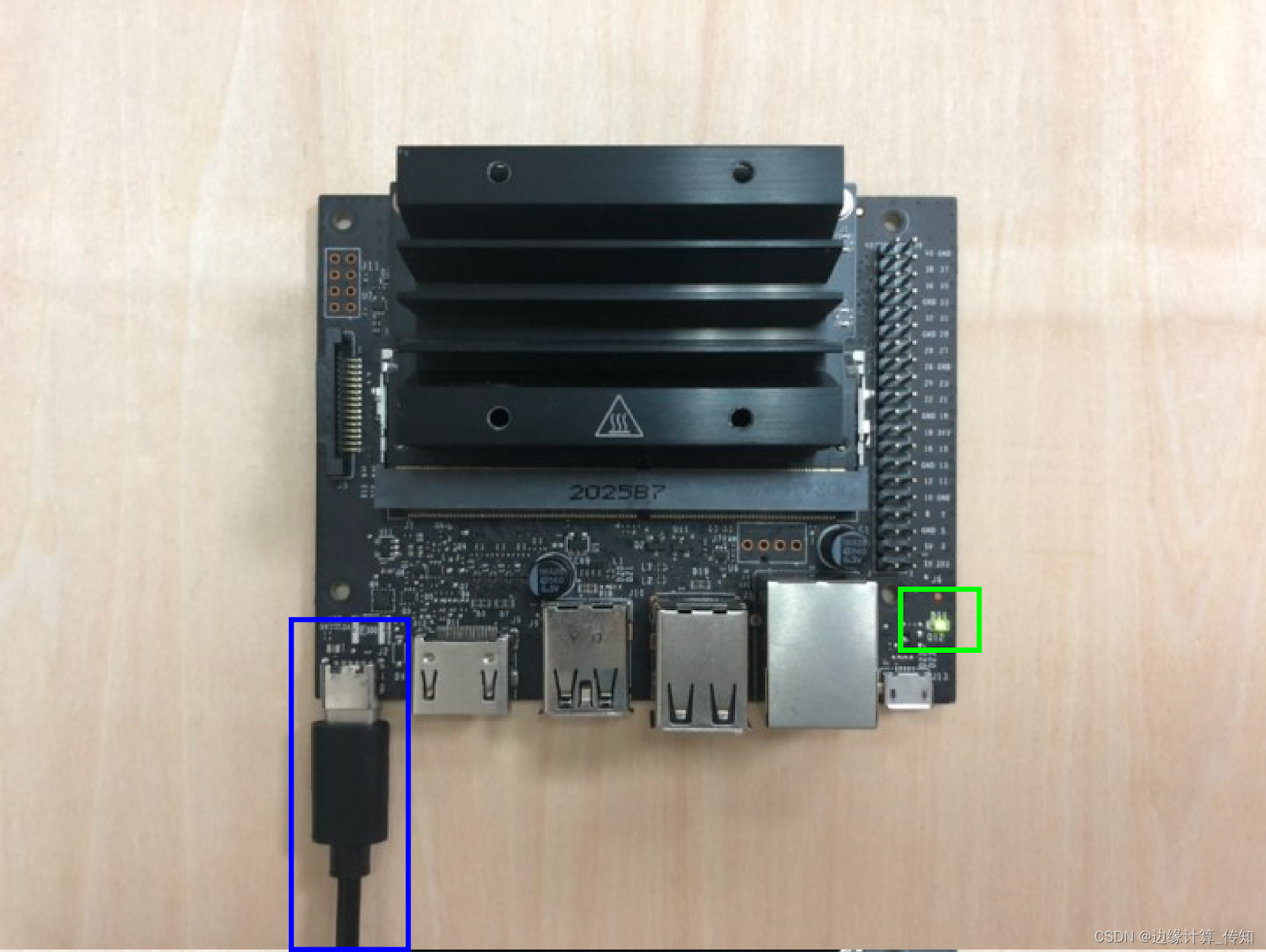
图三 Jetson nano 2GB 成功启动后的配置
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)