一、crazyflie配置
1.查看crazyflie
固件更新完毕后,取下crazyflie,并连接电池,把crazyradio接上电脑usb口,运行以下命令:
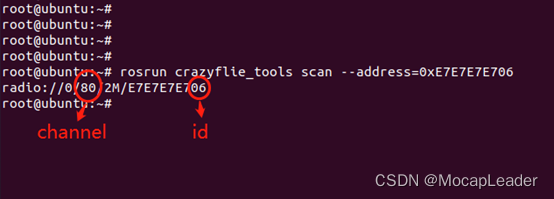
$ rosrun crazyflie_tools scan --address=0xE7E7E7E706
地址形式0xE7E7E7E7<X>,其中<X>为无人机编号的十六进制,得到crazyflie的uri如下:
2.配置文件修改
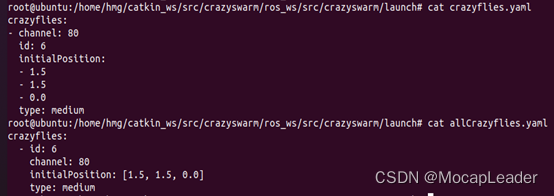
修改crazyswarm/ros_ws/src/crazyswarm/launch路径下crazyflies.yaml和allCrazyflies.yaml文件中channel和id和前面查看到的uri相匹配。
修改crazyswarm/ros_ws/src/crazyswarm/launch路径下hover_swarm.launch和mocap_helper.launch文件中motion_capture_type为“vrpn”,motion_capture_host_name为“10.1.1.198”。

二、测试
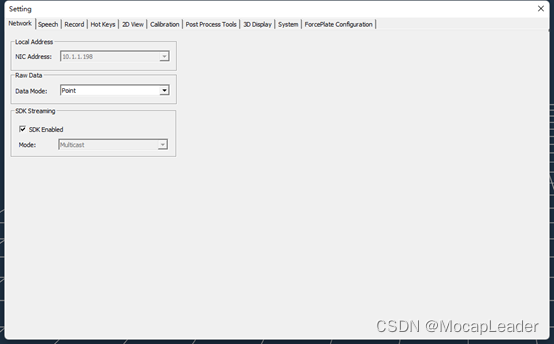
启动nokov软件,并勾选SDK Enabled,
运行NokovVrpnServer_MultiVersion.exe开启vrpn服务端,ubuntu下运行
$ roslaunch crazyswarm mocap_helper.launch
得到刚体数据,如图:

本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)