本文将给大家介绍我们P450无人机在进行室外首次飞行时,一些常见的注意事项及正确的使用方法。
我们在使用这种PX4开源无人机时,一定要有一个清楚的认识。它和大疆那种消费级无人机在使用和操作上,是有非常大的不同的。大疆的无人机其本身将多传感器的数据进行融合,加之其先进的用户交互界面,将无人机的操作降低到了一个非常低的门槛。但PX4无人机本身是偏向于科研实验和用户DIY的,并没有多传感器融合这样的安全措施,不具备多鲁棒的一个特性。故而在使用PX4这种无人机时,我们就需要遵循它的基本操作步骤,才能让我们安全稳定的使用这种开源无人机。
我们阿木实验室有感于这种开源无人机的使用门槛,同时为了让购买了我们产品的用户能够更好的使用我们的产品,本文将详细介绍P450室外飞行的一个操作步骤。
首先在室外飞行时,我们需要选择较为空旷的环境,并且远离强电磁环境,防止它对无人机的GPS造成干扰。在室外飞行,注意一定要栓安全绳,栓上安全绳可以对无人机起到一个保护的作用,又不会影响到无人机功能的测试。在外出测试前我们需要检查无人机的相关配件是否携带齐全,防止因配件遗漏导致无法测试,除图上这些配件,我们还需带一根USB数据线用于传感器校准和折叠座凳用于放置电脑。  我们在室外飞行给无人机使用的电源是4S的航母电池,这种航模电池一个电芯的安全使用电压是3.6~4.2V,若电压高于4.2则电池处于过充状态,电压低于3.6电池处于过放状态,过充过放都会影响电池的使用寿命,更严重者甚至会导致电池自燃或爆炸。所以我们在进行室外飞行时,需要将测电计插上电池监控电池电压。电池日常保存时,需要将电池保存在防爆柜,电池的电压也需维持在2/3左右。
我们在室外飞行给无人机使用的电源是4S的航母电池,这种航模电池一个电芯的安全使用电压是3.6~4.2V,若电压高于4.2则电池处于过充状态,电压低于3.6电池处于过放状态,过充过放都会影响电池的使用寿命,更严重者甚至会导致电池自燃或爆炸。所以我们在进行室外飞行时,需要将测电计插上电池监控电池电压。电池日常保存时,需要将电池保存在防爆柜,电池的电压也需维持在2/3左右。  再讲解一下测电器(BB响)的使用,首先我们将电池的排线插头无凸起的一面向上,然后将插头从测电器的第一根插针插入,听到测电器BB的响声就表示插入正常。我们就可以通过测电器观察电池电量,最先显示的是电池的总电压,然后会分别显示每块电芯的电压。
再讲解一下测电器(BB响)的使用,首先我们将电池的排线插头无凸起的一面向上,然后将插头从测电器的第一根插针插入,听到测电器BB的响声就表示插入正常。我们就可以通过测电器观察电池电量,最先显示的是电池的总电压,然后会分别显示每块电芯的电压。 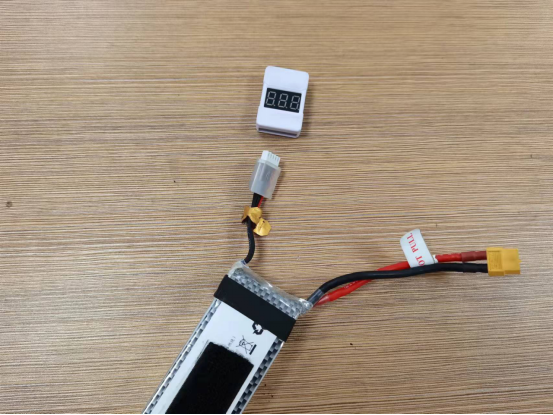
 将无人机上电启动,并将遥控器开机,遥控器开机时所有挡杆拨到最上方。上电完成后,我们通过笔记本电脑去连接无人机的飞控,需要先连接到无人机的wifi进入局域网。无人机的wifi名为amov-uavXXXXX,可以通过无人机上的标签获取到。然后,我们打开QGC软件创建一个TCP连接,连接的IP同样可以再无人机标签上获取一般为192.168.10.xxx,端口号为6000。
将无人机上电启动,并将遥控器开机,遥控器开机时所有挡杆拨到最上方。上电完成后,我们通过笔记本电脑去连接无人机的飞控,需要先连接到无人机的wifi进入局域网。无人机的wifi名为amov-uavXXXXX,可以通过无人机上的标签获取到。然后,我们打开QGC软件创建一个TCP连接,连接的IP同样可以再无人机标签上获取一般为192.168.10.xxx,端口号为6000。 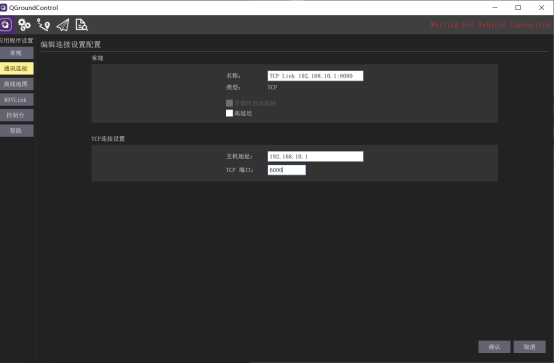 连上飞机后,通常需要校准来消除传感器因颠簸和环境因素产生的误差。我们点击地面站的传感器一栏,分别对各个传感器进行校准,校准的步骤根据地面站的提示操作,校准完飞控需要重启才能生效。
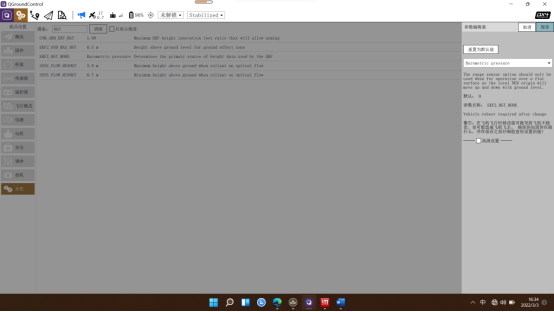
连上飞机后,通常需要校准来消除传感器因颠簸和环境因素产生的误差。我们点击地面站的传感器一栏,分别对各个传感器进行校准,校准的步骤根据地面站的提示操作,校准完飞控需要重启才能生效。 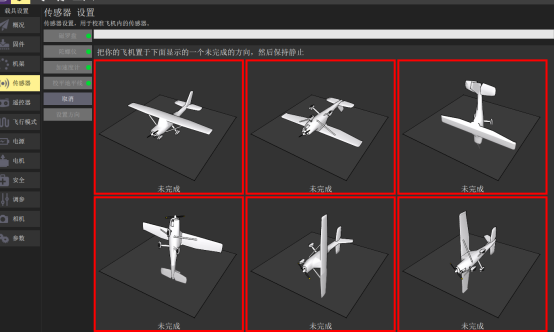 同时我们需要将飞控的定位来源更改,点击参数,在搜索栏输入aid,选择EKF2_AID_MASK这个参数,设置为use GPS并保存。再输入hgt,点击EKF2_HGT_MODE这个参数,修改为Barometric Pressure,然后再重启飞控。
同时我们需要将飞控的定位来源更改,点击参数,在搜索栏输入aid,选择EKF2_AID_MASK这个参数,设置为use GPS并保存。再输入hgt,点击EKF2_HGT_MODE这个参数,修改为Barometric Pressure,然后再重启飞控。 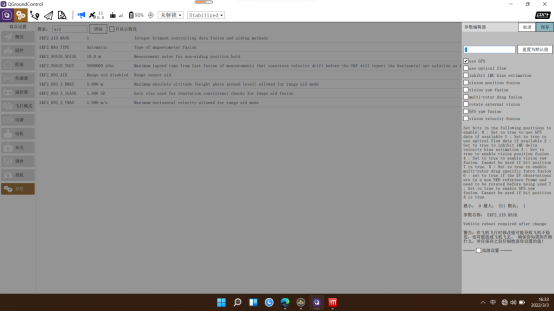
 飞控重启并连接后,我们点击卫星的标志查看GPS的状态,当GPS卫星数达到12颗星以上并进入到3D GPS Lock状态,代表飞机的定位数据良好,然后我们试着将遥控器的SWC摇杆拨到中间将无人机切入POSITION模式,并在地面站观察无人机是否进入PISITION,若正常进入即可解锁起飞。
飞控重启并连接后,我们点击卫星的标志查看GPS的状态,当GPS卫星数达到12颗星以上并进入到3D GPS Lock状态,代表飞机的定位数据良好,然后我们试着将遥控器的SWC摇杆拨到中间将无人机切入POSITION模式,并在地面站观察无人机是否进入PISITION,若正常进入即可解锁起飞。 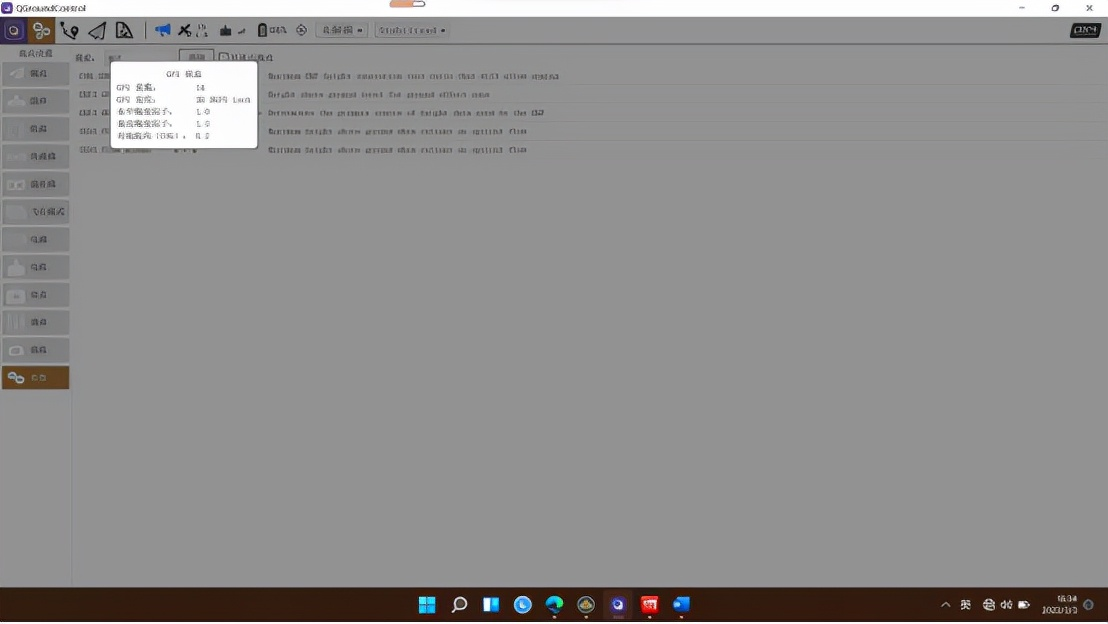
阿木实验室致力于为机器人研发提供开源软硬件工具和课程服务,让研发更高效!
技术发展的日新月异,阿木实验室将紧跟技术的脚步,不断把机器人行业最新的技术和硬件推荐给大家。看到经过我们培训的学员在技术上突飞猛进,是我们培训最大的价值。如果你在机器人行业,就请关注我们的公众号,我们将持续发布机器人行业最有价值的信息和技术。
阿木实验室致力于为机器人研发提供开源软硬件工具和课程服务,让研发更高效!
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)