暑假留校,老师给我们拿了两块开发板,一个是英伟达的Jetson TX2,一个是up squared,让我们先熟悉开发板,为明年的比赛做准备。这两个板子是前几届学长做比赛用过的。自己也是刚开始接触这些板子,就按照网上的教程开始学学。
一、Jetson TX2
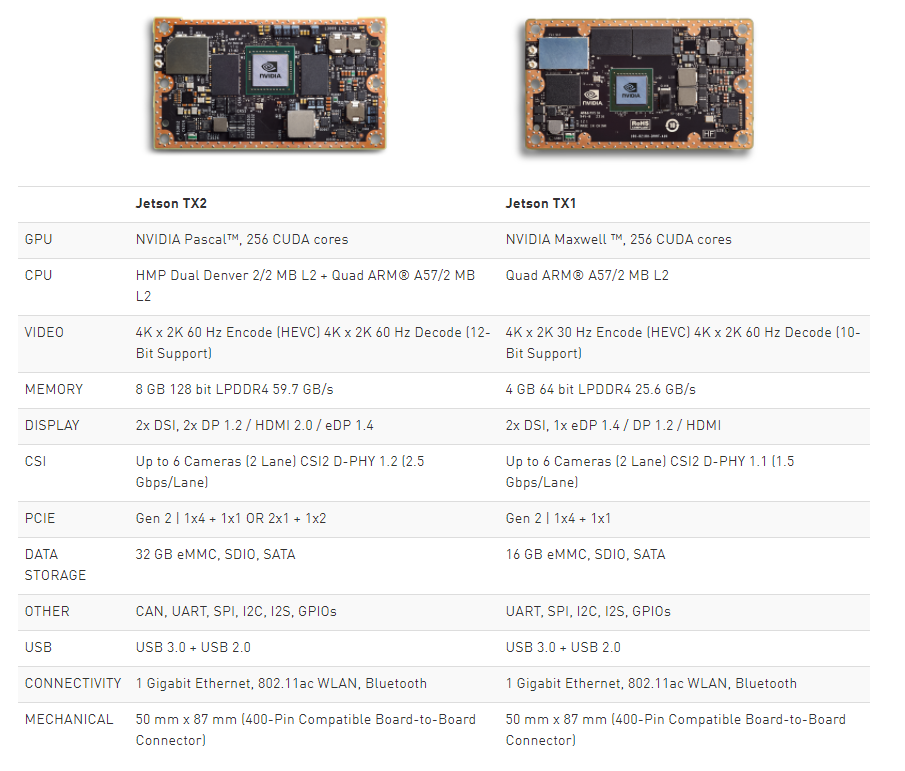
1.性能
256核心NVIDIA Pascal GPU:完全支持所有现代图形API,统一着色器并支持GPU计算。GPU 支持与分立NVIDIA GPU相同的所有功能,包括广泛的计算API和包括CUDA在内的库。高度功耗优化,可在嵌入式使用案例中实现最佳性能。
ARMv8(64位)多处理器CPU复合体:两个CPU集群通过NVIDIA设计的高性能相干互连结构连接; 支持两个CPU集群同时运行,以实现真正的异构多处理(HMP)环境。Denver 2(双核)CPU集群针对更高的单线程性能进行了优化; ARM Cortex-A57
MPCore(四核)CPU集群更适合多线程应用和更轻负载。
128位内存控制器:128位DRAM接口,提供高带宽LPDDR4支持。
eMMC(固态存储器):32GB,装上系统和Jetpack,还剩10个G多点。
功耗:15W,有几个功耗模式可以选择。
高级高清视频编码器:以60fps录制4K超高清视频,最高可达12位像素。支持H.265和H.264 BP / MP / HP / MVC,VP9和VP8编码。
显示控制器子系统:两个多模(eDP / DP / HDMI)输出和最多8个通道的MIPI-DSI输出。多行像素存储允许更高内存效率的缩放操作和像素提取。还提供硬件显示器表面旋转以减少移动应用中的带宽。
1.4Gpix/ s高级图像信号处理:硬件加速静止图像和视频捕获路径,带有高级ISP。
音频处理引擎:音频子系统可通过多个接口为多声道音频提供全面的硬件支持。
CPU内核的5种模式:
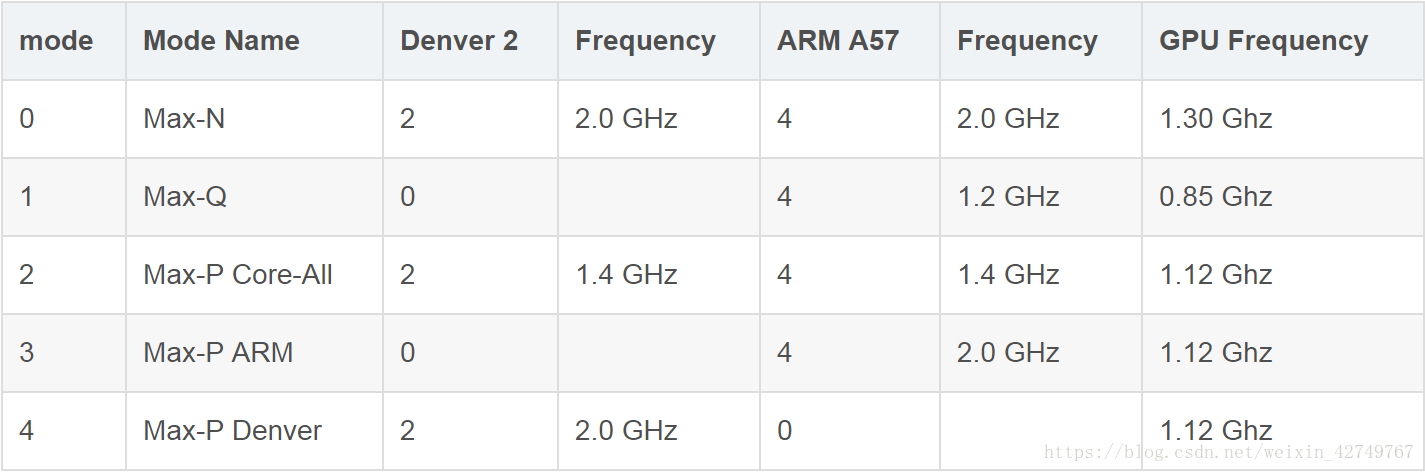
TX2默认模式只开4个ARM A57 CPU,即mode1模式(Max-Q)
2.应用
智能视频分析(IVA),无人机,机器人,游戏设备,虚拟现实(VR),增强现实(AR)和便携式医疗设备等领域。
3.软件平台
出厂自带 Ubuntu 16.04 系统,可以直接启动。
更新到最新的 JetPack L4T(俗称刷机),并自动安装最新的驱动、CUDA Toolkit、cuDNN、TensorRT等。
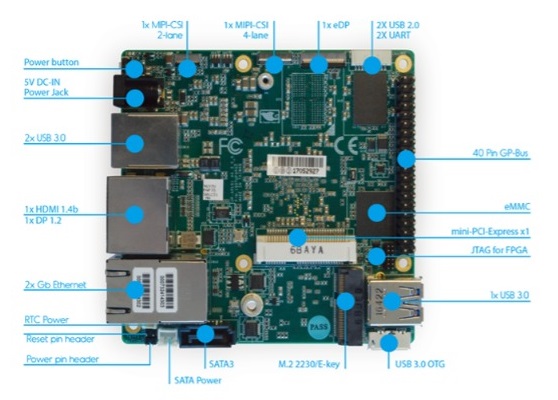
二、up squared
1.性能
CPU具有英特尔®赛扬™,奔腾™和凌动™处理器(代号为Apollo Lake),最高频率可达1.92Ghz,是世界上速度最快的主板,内核GPU是400核心显卡。搭配了1GB/2GB/4GB DDR3 RAM 和16GB/32GB/64GB eMMC。
能够安装多种系统,由于处理器是复杂指令集架构,因此能够完美运行所有版本的win10系统,还支持android 6.0 和部分linux的发行版,比如ubuntu,ublinux等。
一定要注意:up squared上电,datasheet中说明供电大小为5v 4A。
2.功能特点
与多数Raspberry Pi HAT相容
搭载Quad Core Intel CPU及Graphic,高性能专业创客板卡
开发社群支持
丰富Linux支持(Debian-Ubilinux, Ubuntu, yoctoLinux)
支持Windows 10
支持Ubiworx物联网云端服务架构
可扩充的IO整合模组
工业级水准产品及后端支援
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)