关注同名微信公众号“混沌无形”,阅读更多有趣好文!

1.电源管理的功能:具备电压过高保护、电流过大保护、电量监测、过放保护等功能---->自主充电
2.一款清洁机器人的运动控制系统方案设计示意图

2.1电源充电及其报警框图
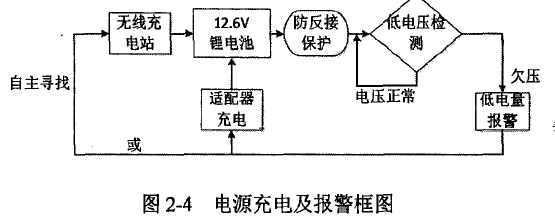
2.2 电源管理具体电路设计[电源的过放和过充保护:低电压检测+过充保护]
(1)检测电池充放电:可选择锂电池充放电管理集成芯片AX3703,【三节锂电池充电专用】--->精确控制充电过程
(2)AX3703简介:采用PWM降压模式进行充电管理,其使用方法简单、封装较小且不需过多的外围器件。该苍片具有两种充电模式,即恒流和恒压,两种模式的存在使裡电池充电管理更加高效便利。对应钮电池的充电电流大小可通过外部电阻进行设置,最大可达5A,满足机器人快速充电的需要。恒压充电时,可自动调制成所需电压,且有较高的精度。
(3)STM32采用3.3V电源供电:系统电源中采用ALPHA化MICONDUCTOR公司的泛款AS1117M-3.3V低压差稳压源,为单片机及周围附属设备提供稳定的3.3V电压。
【注:0欧姆电阻共地】
(4)选取了SPX2940和AS1117M-3.3两款电源芯片为各部分提供稳定的电压源,如图所示
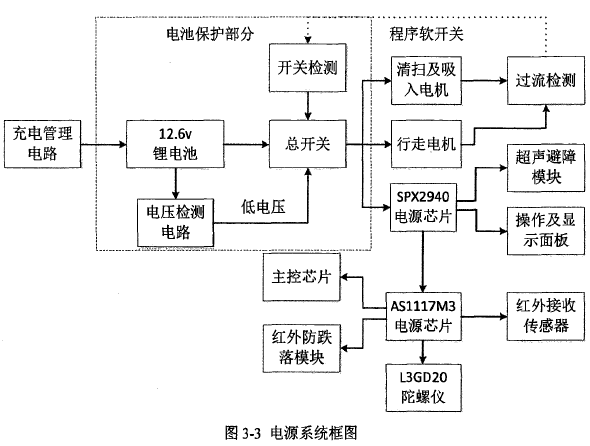
(5)电池和转换芯片之间增加静噪滤波器BNX002-01,作用为 滤除前端电压波动和噪声干扰
电压转换芯片-->低功耗LDO(low dropout regulator,是一种低压差线性稳压器):12V-->5V=>SPX2940
5V--->3.3V=>AS1117M3-3.3
(6)电源报警电路:低压报警电路【电量不足】+过流报警电路【电机堵转,电流过大,烧毁电机】
具体电路参考文献:徐法格. 基于分数阶微积分的智能清洁机器人控制系统设计[D]. 山东大学, 2015. 第三章 P23-34
2.3 电机驱动电路设计【包含过流检测电路】
参考选择电机:东顺直流减速电机DS-RS555---->H桥驱动电路----采用集成H桥的驱动芯片LG9110(自带防反向电流冲击的钳位二极管)
过流检测电路【防止烧毁电机】:电机驱动电路中加入了过流检测电路,在机器人正常运转情况下,采样电阻R55的压降较小,低于反相端的电压,运算放大器的输出端为低;当电机发生堵转等极端情况从而引起电流过大时,采样电阻的压降变大,此时正向端电压将高于反相端,从而使输出状态发生翻转。CPU的过流检测端检测到电机电流出现异常情况时,会马上关掉相应电机PWM输出,从而防止出现烧坏电机的危险。采样电阻应选精密度在千分之一左右的精密电阻。==>引用自《基于分数阶微积分的智能清洁机器人控制系统设计》------->具体驱动电路见图3-14
基于分数阶微积分的智能清洁机器人控制系统设计-----资料摘抄
-------------------------------------------------------------------分割线-----------------------------------------------------------------------
3.1 电源管理种类:静态电源管理+动态电源管理[DPM]
(1)静态电源管理是指在的整个设计阶段为减小系统电能消耗而采取的节能措施,通俗讲就是采用低功耗硬件电路。
(2)动态电源管理指的是在系统运行期间,通过动态地分配系统资源以最少的元件或元件最小工作量的低耗能状态,来完成系统任务的一种降低功耗的设计方法。其主要思想是通过对系统电压或时钟频率的动态控制来达到节省电源能量的目的。----------动态电源管理算法
3.2 动态电源管理
(1)动态电源管理方案通过对设备工作时间或睡眠时间的预测来实时调整设备的耗能状态,其中对设备睡眠时间的预测比较常见。
(2)对设备睡眠时间预测的电源管理方案分为三种类型:①基于超时算法(Time-out Policy)②预测算法(Predictive Policy)和③随机算法(stochastic policy)。
(3)以上三种算法简介
①基于超时算法(Time-out Policy):超时算法由用户预先设定一个等待时间τ,一旦监测到系统或系统的某个功能模块处于空闲状态的时间超过τ,就将它们关闭,直到新的指令到来,再唤醒该它们。如microsoft windows在的控制面板中设定五分钟屏幕保护τ=300s就是这种算法的应用。该种方案又分为两种,分别是比较超时算法(competitive time-out policies)和自适应超时算法(adaptive time-out policise)。
②预测算法(Predictive Policy):预测算法一经启动,无需经过超时期τ的等待,就对空闲时间进行预测。如果预测的空闲时间比某一参考时间要长,那么设备一旦处于空闲状态,就进入睡眠。预测算法依赖于以前的空闲时间和工作时间来决定空闲时间的长短。当设备进入睡眠状态后,将至少有一个命令因为要唤醒睡眠中的系统而等待,预测算法还可通过预测来唤醒设备,消除这种等待。但是,准确的预测等待多长时间是非常困难的。过早的唤醒设备,会导致能源的浪费,而过迟的唤醒设备,则违背了该算法的初衷。如果以空闲时间局部相关为假设前提,则该算法适合在局部服务请求的频率接近平稳状态的情况里使用。预测算法也可一分为二,分别是指数平均预测算法(Exponential Average Predictive)和学习树算法(Learning Tree)。
③随机算法(stochastic policy):随机算法,将指令的出现和设备的电源状态的改变看作是一个随机的过程,将设备的能耗问题看作是一个随机优化问题。随机算法就是对请求产生和设备状态的改变,使用马可夫过程。这种方法可以在节能与保证性能之间取得平衡,前面两者都无法保证这一点。随机算法又可分为如下三种,分别是离散时间的马可夫过程、连续时间的马尔可夫过程和连续时间的半马尔可夫过程。
(4)电源管理原理:
当有指令出现时,设备被占用,开始工作;无指令出现时,设备被闲置,处于空闲状态;当指令再一次出现时,设备又被唤醒进入工作状态。这就是所谓的“电源管理”。
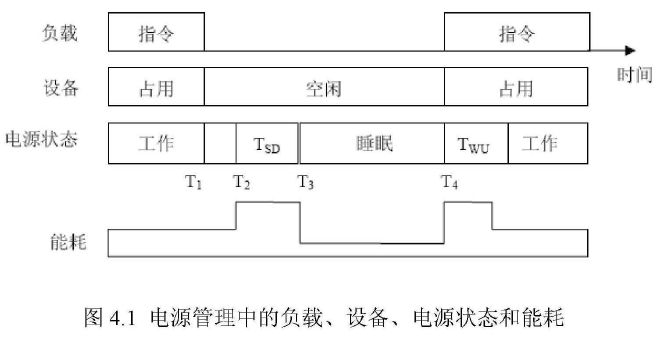
对图4.1的解释:如图所示,在和时间段,设备处于空闲状态,按照电源管理的观点,此时它应该进入睡眠状态。在图中,设备从时间开始进入睡眠,直到时间被唤醒。然而,耗能状态的改变是需要时间的,也就是进入睡眠状态的时间延迟和进入工作状态的唤醒延时,而且唤醒休眠状态中的设备需要额外的能量开销,如果没有这项开销,也就用不着电源管理技术了,完全可以在设备空闲时就关闭设备。所以,只有当设备在休眠状态所节省的能量至少可以抵消状态转换的能耗时,才应该进入休眠状态,这样的电源管理才有意义。
系统电路的总功耗是活动功耗与静态功耗之和。当电路工作或逻辑状态转换时会产生活动功耗,未发生转换时晶体管漏电流会造成静态功耗:

①电压时钟调节:通过降低电压和时钟来减少活动功耗和静态功耗。
②时钟选通:将闲置电路模块的时钟断开,减少活动功耗。许多都有“闲置”或“停止”指令,一些处理器还可通过门控关闭非时钟模块,如高速缓存、外设等。
③电源供应选通:断开闲置电路模块的电源供应。
策略分析:断开不使用的模块的时钟和电源供应可以减少电源消耗,但要能够正确预测硬件模块的空闲时期。因为重新使能硬件模块时钟和电源会造成一定延迟,不正确的预测将导致性能下降。降低电压对功耗的贡献是次方的;降低时钟也可降低功耗,但它同时也延长了任务的执行时间,降低了系统性能。所以,选择满足性能所需的最低时钟频率,在时钟频率和各种系统部件运行电压要求范围内,设定最低的电源电压,将会大量减少系统功耗。
3.3 电源管理算法介绍
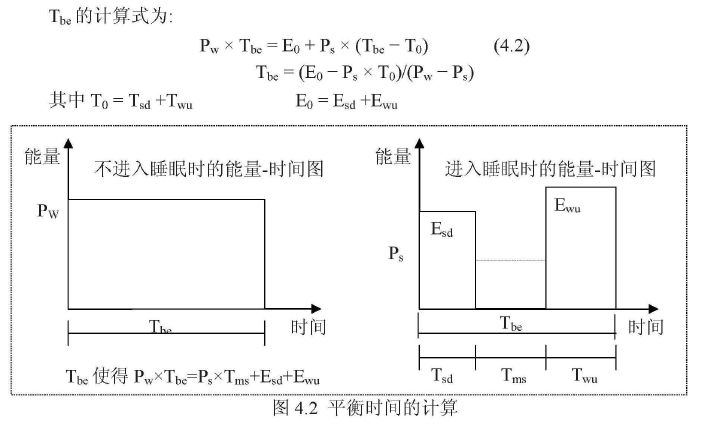
(1)概念介绍----->平衡时间Tba:电源管理实际上是一个与预测有关的问题它希望通过预测来判断一个空闲时间是否长到足以弥补状态转换过程中的能量损耗。刚好能节省能量的时间或是弥补状态转换过程中能量损耗的时间就称为平衡时间Tba(如图所示)。所有对睡眠时间进行预测的方案都以平衡时间为基准,将预测时间与之相比较,并由此判断是否应该进入睡眠。对于不同的硬件设备,状态转换所花的时间可能不同,因而平衡时间也就不同。
(2)超时算法:比较超时算法(competitive time-out policies)和自适应超时算法(adaptive time-out policise)
所谓比较超时算法就是是同理想的电源管理方案作比较,它的τ值一旦设定就不再改变。在这种算法中,考虑最糟糕的情况,即刚进入睡眠的设备马上就接收到了指令而被唤醒,如果设定τ值与装置的平衡时间相等,这时的能量消耗最多也不过是理想方案能耗的两倍。
自适应超时算法以历史的空闲时间为依据,在运行阶段对τ值进行实时的调整,调整方法有几种:
方法之一:空闲时间很长或工作时间很短,则减小τ值;反之,增加τ的值。
方法之二:提供一组τ值,为每个τ值分配一个可信度,一旦进入空闲状态,系统会从适合于实际情况的一组值中挑选一个可信度最高的使用。
方法之三:提供一组τ值,根据每个τ值使用时的满意度,为其设置加权系数;τ的调整值为所有提供的τ值的加权平均。
(3)预测算法---详见《模块化微控制器及其电源管理技术研究_孙珍军》P29
3.4 电机控制电路
(1)电机的控制电路包括功率驱动器,调速脉冲发生器、光电隔离模块和驱动器保护电路
(2)改进的驱动电路图
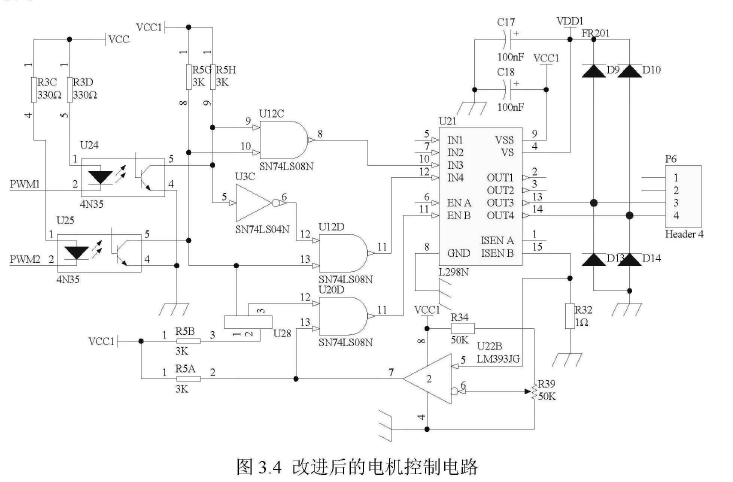
未考虑电机过流;电机工作对电源的干扰很大,可采用双电源供电,在控制部分和电机驱动部分之间采用光耦【隔离强电和弱电】隔开,以免影响控制部分电源的品质。
注:见 《模块化微控制器及其电源管理技术研究_孙珍军》P16 图3.4
3.5 单片机的两种省电模式:空闲模式和掉电模式
(1)空闲模式:进入空闲模式后,程序计数器停止,但系统的时钟还在跑,所有中断和外围设备保持工作状态,片内和特殊功能寄存器保持数据,器件通过系统中断或硬件复位退出空闲模式。
(2)掉电模式:在掉电模式中,时钟停止,外部中断可以响应,的内容保持,此时最小的是VDD 2.0V
模块化微控制器及其电源管理技术研究-----资料摘抄
-------------------------------------------------------------------分割线-----------------------------------------------------------------------
4.1 通信模块-->ZigBee(2.4G)是基于IEEE802.15.4标准的低功耗局域网协议。根据国际标准规定,ZigBee技术是一种短距离、低功耗的无线通信技术。这一名称(又称紫蜂协议)来源于蜜蜂的八字舞,由于蜜蜂(bee)是靠飞翔和“嗡嗡”(zig)地抖动翅膀的“舞蹈”来与同伴传递花粉所在方位信息,也就是说蜜蜂依靠这样的方式构成了群体中的通信网络。其特点是近距离、低复杂度、自组织、低功耗、低数据速率。主要适合用于自动控制和远程控制领域,可以嵌入各种设备。简而言之,ZigBee就是一种便宜的,低功耗的近距离无线组网通讯技术。ZigBee是一种低速短距离传输的无线网络协议。ZigBee协议从下到上分别为物理层(PHY)、媒体访问控制层(MAC)、传输层(TL)、网络层(NWK)、应用层(APL)等。其中物理层和媒体访问控制层遵循IEEE 802.15.4标准的规定。【型号可选DRF1605H】
4.2 电流检测模块:芯片型号-->INA138,供电电压+-9V
4.3 电源转换
(1)对于开关电源,其特点为高频开关转换频率高,尤其在大压差大电流的情况下电源转换效率高,功耗低等。
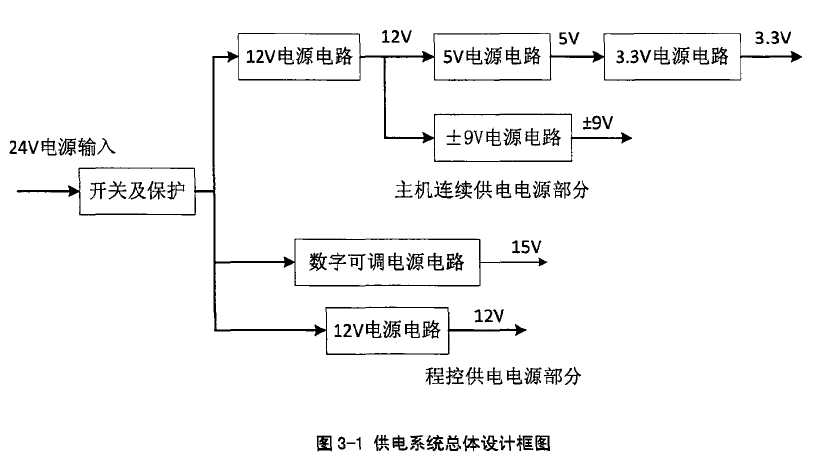
如 主控芯片、电流检测模块、通信模块 等 需要连续供电,其他,如 驱动系统、摄像头模块 等,采用程序控制通断电
(2)硬件设计
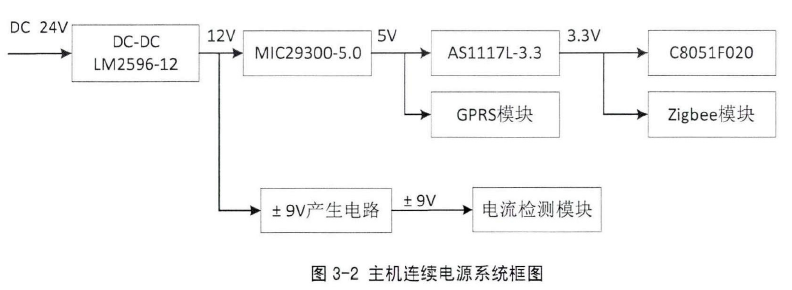
LM2596系列:LM2956系列开关电源转换芯片是一种降压型直流电压转换芯片,它的转换效率较高,最高可达90%以上,输出电流最大可达到3A,输出电压分为3.3V、5V、12V和可调电压输出。
LM2678系列:类似于LM2956,性能更强
MIC29300-5BT:MIC29300-5BT是大电流低压差稳压器,通过调整内部的调整管来实现稳定的降压功能,属于降压型电源转换芯片,特点是工作反应速度快,输出纹波较小,而且具有过流和过热断电保护功能,可为负载提供3A的负载电流和稳定的5V输出电应。
具体各模块硬件电路设计,参考 《沙基机器人供电系统设计_孙培刚》第四章
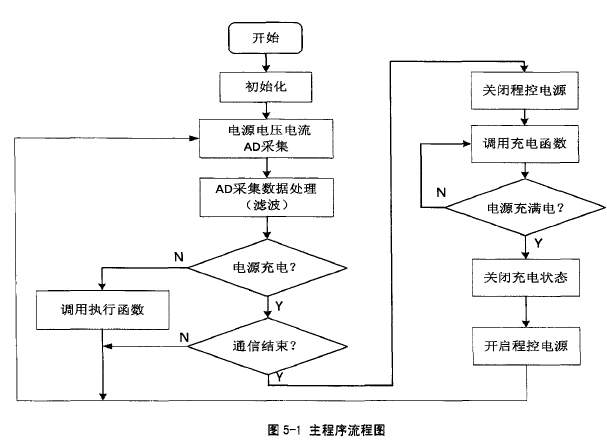
4.4 供电系统软件设计
过充保护:当程序检测到电源电量商于饱和电量,且电源电流小于饱和电流时,即电源电量充满,系统关巧充电状态,停止充电,防止电源出现过冲状态。
沙基机器人供电系统设计-----资料摘抄
-------------------------------------------------------------------分割线-----------------------------------------------------------------------
5.1 充电状态检测方法:
(1)充电状态SOC(state of charge):描述电池状态的一个重要参数,也是电源管理必须要研究的问题。通常把在一定温度下电池充电到不能再吸收能量的状态称为SOC为100%,而将电池再不能放出能量的状态称为SOC为0%。
(2)检测方法:库伦计数法(误差大)、电阻检测法(理论简单,模型很难建立)、开路电压检测法(方法简单,需储存大量的典型数据)
5.2 电源管理
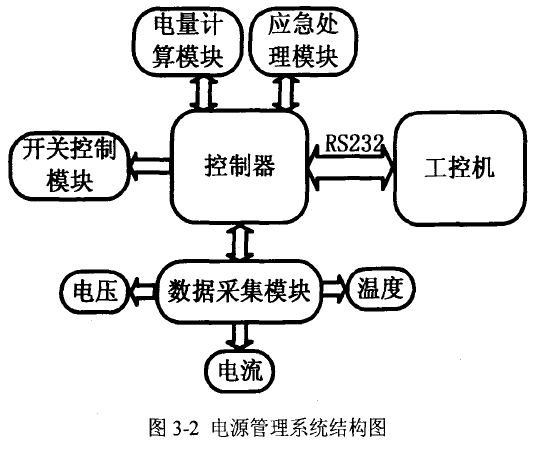
(1)电源管理的主要功能是通过采集各个耗电模块节点的电压、电流、和电池及测试点温度等信息通过计算得出系统剩余工作时间的估计值和系统的工作状态,通过接口与负责决策处理的中央工控机进行通信,通过对每一路情况的分析,为中央控制系统提供决策,同时通过驱动电路控制继电器对每一路分别进行相应的供电控制。在出现问题时应急处理模块启动,对故障进行处理保障AUV顺利返航。
(2)电量计算模块:电量计算模块采用每秒平均电流值作为当前单位时间的电量进行累加。存储下来后,根据电池总电量、己消耗电量和当前工作电流,可以计算出系统所能工作的剩余时间,可为整个系统的运行提供参考。
(3)电压监测:TI公司的TLC2543对电压信号进行采集
电流监测:LEM公司的电流传感器LTSR 25-NP采集电流信号
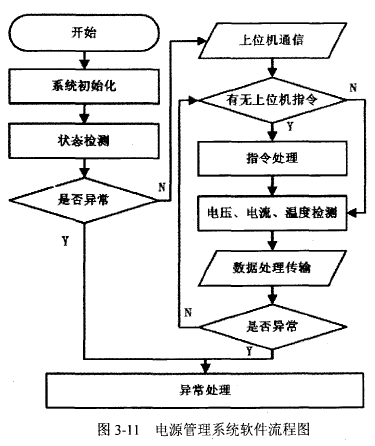
5.3 电源系统软件设计
(1)较常用的无位置传感器的无刷直流电机控制方法有:反电势法、电感法、磁链法和人工智能法。最常用的是反电势法,包括端电压检测法、反电势积分法、反电势三次谐波法、续流二极管法、线反电势法。
(2)控制方法介绍:
①反电势法:电机转子在旋转的时候就会在定子绕组中产生感应电势,即反电势。反电势法是通过检测反电势过零点信号延迟30度的角度,从而得到转子位置信息对电机进行控制。由如图所示,反电动势过零点换相时刻关系可以看出在Q1~Q6、一一个周期之内个换相点分别滞后过零点30度。反电势法的关键是对反电势过零点的检测。
②端电压检测法:参考P37
③电感法:在绕组中施加脉冲电压检测电流的幅值,通过电机电感性质表现出来的电流幅值差异来判断转子的位置。其对于检测静止时转子的初始位置比较好,但由于电机绕组的电感差异较小,必须要有高精度的电流检测电路来保证。
④磁链法:磁链法是通过估计磁链的位置来获得转子的位置信息,其计算量较大,低速运行时容易产生积累误差。
如果喜欢的话,可以关注同名微信公众号“混沌无形”,阅读更多有趣好文!

本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)