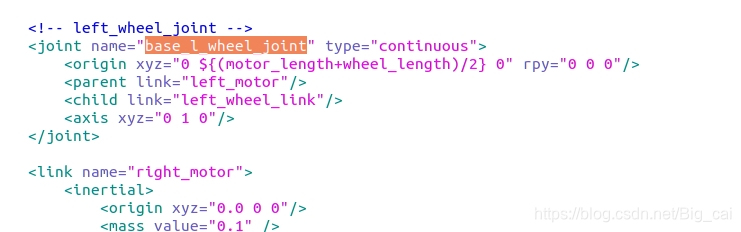
ROS-melodic下运行出现[ WARN] :Joint state with name: “base_l_wheel_joint” was received but not found in URDF
原因是在robot描述文件URDF中关节定义出错,找到launch文件使用的URDF描述文件,并将left_wheel_joint修改成base_l_wheel_joint,将right_wheel_joint修改为base_r_wheel_joint。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)