1. Opitrack系统标定
工作环境:
运行Motive的Windows主机
和一台安装有ROS的ubuntu电脑
标定步骤
1、准备、 优化捕获设置;
2、 在相机预览窗口( Camera Preview) 中, 点击 清除现有的 Mask 区域;
3、 打开标定窗口,使用 Mask Visible 去除场地中不能移除的反光物体;
4、 采集标定采样点( Wanding);
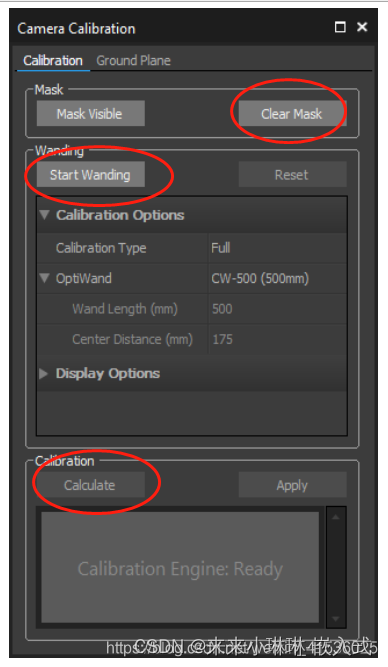
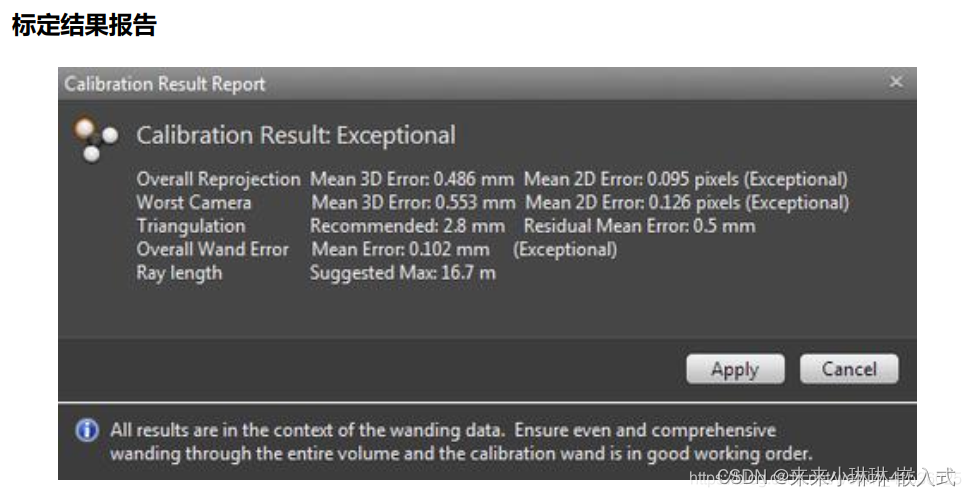
5、 然后手持T形标定杆,在摄像头能够拍到的地方随意舞动、 检查标定结果,一般只要每个摄像头采集到的有效点数目超过2000,标定效果就挺好的;
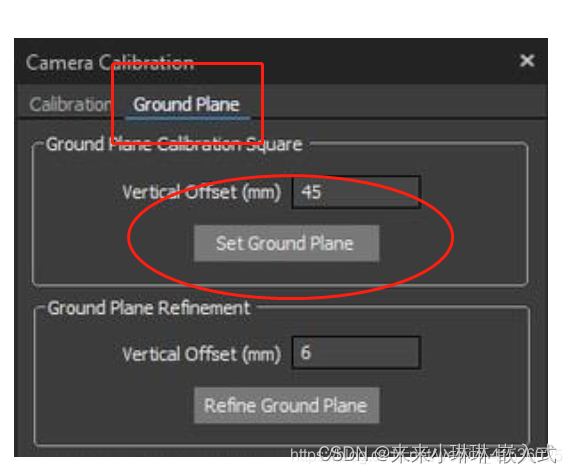
6、 放入L型标定杆,L行标定杆长的部分为Y方向,短的为X方向,直角处就是原点。当放置好L形标定杆以后,就点击calibration中的set Ground Plane 按钮设置地面。
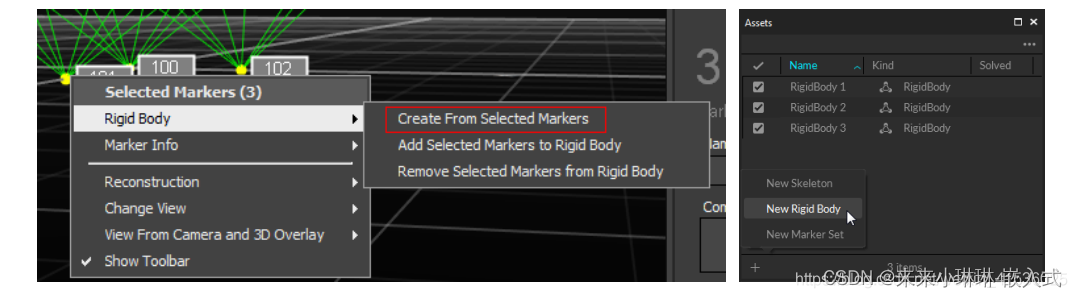
2. 接下来就是创建刚体
选择需要使用到的点(在Motive软件中),然后点击鼠标右键,选择 Rigid Body 下的 Create From Selected Markers,就可以创建一个刚体。示意如图下所示:
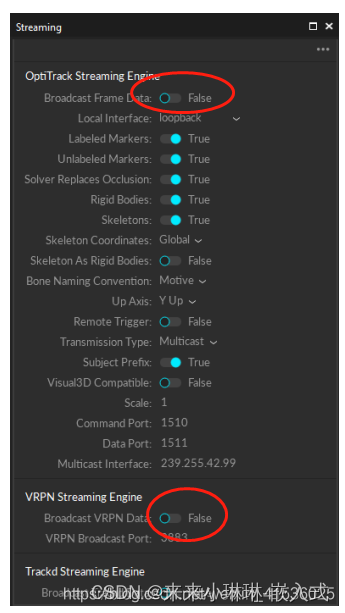
3. 广播发送数据
选择功能区中的view->Data Streaming,然后配置如下所示:
下面两个红色区域一定需要选中(就是设置成true),也就是打开了Data Streaming,并且上面的IP一定选择中本机的IP,不要设置成回环,不然就只能本机接收数据了。
4. ubuntu主机环境配置
- 在运行下面的shell命令之前,需要保证两台主机在同一局域网,并且两边的防火墙最好需要关闭,不然会导致相互ping失败。如果是虚拟机,可能需要设置一下虚拟机的网络配置,网上有人说设置成桥接模式可行,但是经过测试,任然不行,推荐还是使用另外一台主机。
- 并且还需要注意,如果主机是被设置成了固定IP,需要先关闭固定IP,然后再重新连接网络,再进行测试两个主机是否能够正常通信,如果能够正常PING通的话,基本就没什么问题了。
cd ~
mkdir testws
cd testws
mkdir src
cd src
catkin_init_workspace
cd ..
catkin_make
git clone git clone https://github.com/clearpathrobotics/vrpn_client_ros.git
sudo apt-get install ros-melodic-vrpn
catkin_make
source devel/setup.bash
roslaunch vrpn_client_ros sample.launch server:=192.168.1.2
rostopic list
rostopic echo 话题名 >>data.txt
引用了:
https://blog.csdn.net/weixin_41536025/article/details/89913961
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)