动捕系统Optitrack,有很高的定位精度,能够给无人机提供比较精确的位置信息,因此如果实验室有条件,都可以买一套动捕系统。
动捕系统的原理:
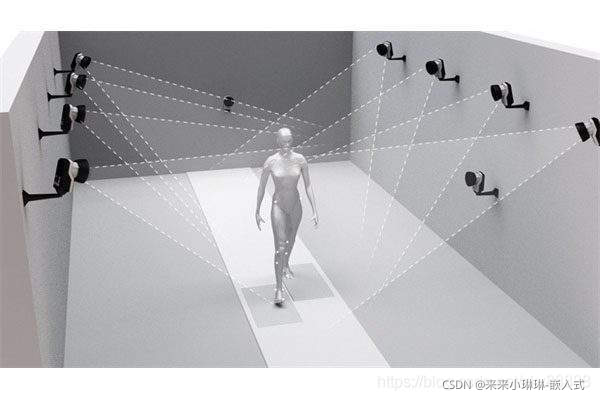
光学式动作捕捉依靠一整套精密而复杂的光学摄像头来实现,它通过计算机视觉原理,由多个高速摄像机从不同角度对目标特征点进行跟踪来完成全身的动作的捕捉。美国大片中的后期特效制作大都是用的这种光学式动捕技术。

- mocap使用教程:ros端动捕系统的程序
https://github.com/llailinn/mocap_optitrack.git
- ros端mavros程序
https:
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)