1. Lattice规划介绍
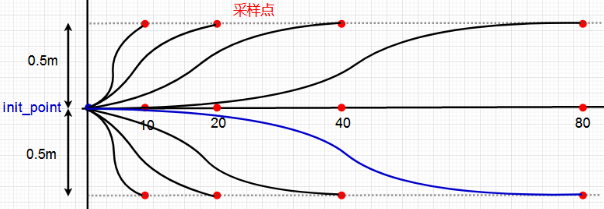
Lattice Planner 是一种基于栅格地图的规划算法,通过搜索和优化实现路径规划的目的。Lattice Planner 的核心思想是将路径规划问题转化为一系列离散化的决策问题,通过搜索和优化得到最优路径(多条路径撒点)。
与传统的A*算法不同,Lattice Planner 能够考虑车辆的动力学约束、道路限制和障碍物等因素,生成更加平滑且安全的路径。
在 Autoware 中,Lattice Planner 主要由以下几个模块组成:
lattice_planner_core:实现 Lattice Planner 的核心逻辑,包括路径搜索、代价计算和路径优化等。
lattice_planner_node:将 Lattice Planner 和 ROS 框架相结合,实现与其他模块的数据交互。
lattice_structure:定义了路径的数据结构,包括路径上的点、速度和加速度等信息。
lattice_traj_optimizer:负责对生成的路径进行优化,得到更加平滑和自然的路径。
Lattice主要用于自主停车、避障等功能。
2. 相关代码
Lattice主要有以下节点:lattice_trajectory_gen、lattice_twist_convert、lattice_velocity_set、path_select。
waypointTrajectory根据当前位姿、速度、路径点等信息生成预测轨迹:
static union Spline waypointTrajectory(union State veh, union State goal, union Spline curvature, int next_waypoint)
{
curvature.success=TRUE;
bool convergence=FALSE;
int iteration = 0;
union State veh_next;
double dt = step_size;
veh.v=goal.v;
while(convergence == FALSE && iteration<4)
{
double horizon = curvature.s/veh.vdes;
ROS_INFO_STREAM("vdes: " << veh.vdes);
ROS_INFO_STREAM("horizon: " << horizon);
veh_next = motionModel(veh, goal, curvature, dt, horizon, 0);
convergence = checkConvergence(veh_next, goal);
if(convergence==FALSE)
{
curvature = generateCorrection(veh, veh_next, goal, curvature, dt, horizon);
iteration++;
if(curvature.success==FALSE)
{
ROS_INFO_STREAM("Init State: sx "<<veh.sx<<" sy " <<veh.sy<<" theta "<<veh.theta<<" kappa "<<veh.kappa<<" v "<<veh.v);
ROS_INFO_STREAM("Goal State: sx "<<goal.sx<<" sy " <<goal.sy<<" theta "<<goal.theta<<" kappa "<<goal.kappa<<" v"<<goal.v);
break;
}
}
}
if(convergence==FALSE)
{
ROS_INFO_STREAM("Next State: sx "<<veh_next.sx<<" sy " <<veh_next.sy<<" theta "<<veh_next.theta<<" kappa "<<veh_next.kappa<<" v "<<veh_next.v);
ROS_INFO_STREAM("Init State: sx "<<veh.sx<<" sy " <<veh.sy<<" theta "<<veh.theta<<" kappa "<<veh.kappa);
ROS_INFO_STREAM("Goal State: sx "<<goal.sx<<" sy " <<goal.sy<<" theta "<<goal.theta<<" kappa "<<goal.kappa);
curvature.success= FALSE;
}
else
{
ROS_INFO_STREAM("Converged in "<<iteration<<" iterations");
#ifdef LOG_OUTPUT
double horizon = curvature.s/v_0;
veh_next = motionModel(veh, goal, curvature, 0.1, horizon, 1);
fmm_sx<<"0.0 \n";
fmm_sy<<"0.0 \n";
#endif
}
return curvature;
}
lattice_twist_convert订阅车辆状态和规划输出,并发布到twist_cmd命令:
ros::Publisher cmd_velocity_publisher = nh.advertise<geometry_msgs::TwistStamped>("twist_raw", 10);
ros::Subscriber spline_parameters = nh.subscribe("spline", 1, splineCallback);
ros::Subscriber state_parameters = nh.subscribe("state", 1, stateCallback);
lattice_velocity_set可根据不同的路段和情况设置不同的车辆速度。
path_select用来实现换道:
#include <ros/ros.h>
#include "autoware_msgs/Lane.h"
#include <iostream>
static ros::Publisher _pub;
void callback(const autoware_msgs::Lane &msg)
{
_pub.publish(msg);
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "path_select");
ros::NodeHandle nh;
ros::Subscriber twist_sub = nh.subscribe("temporal_waypoints", 1, callback);
_pub = nh.advertise<autoware_msgs::Lane>("final_waypoints", 1000,true);
ros::spin();
return 0;
}
以上。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)