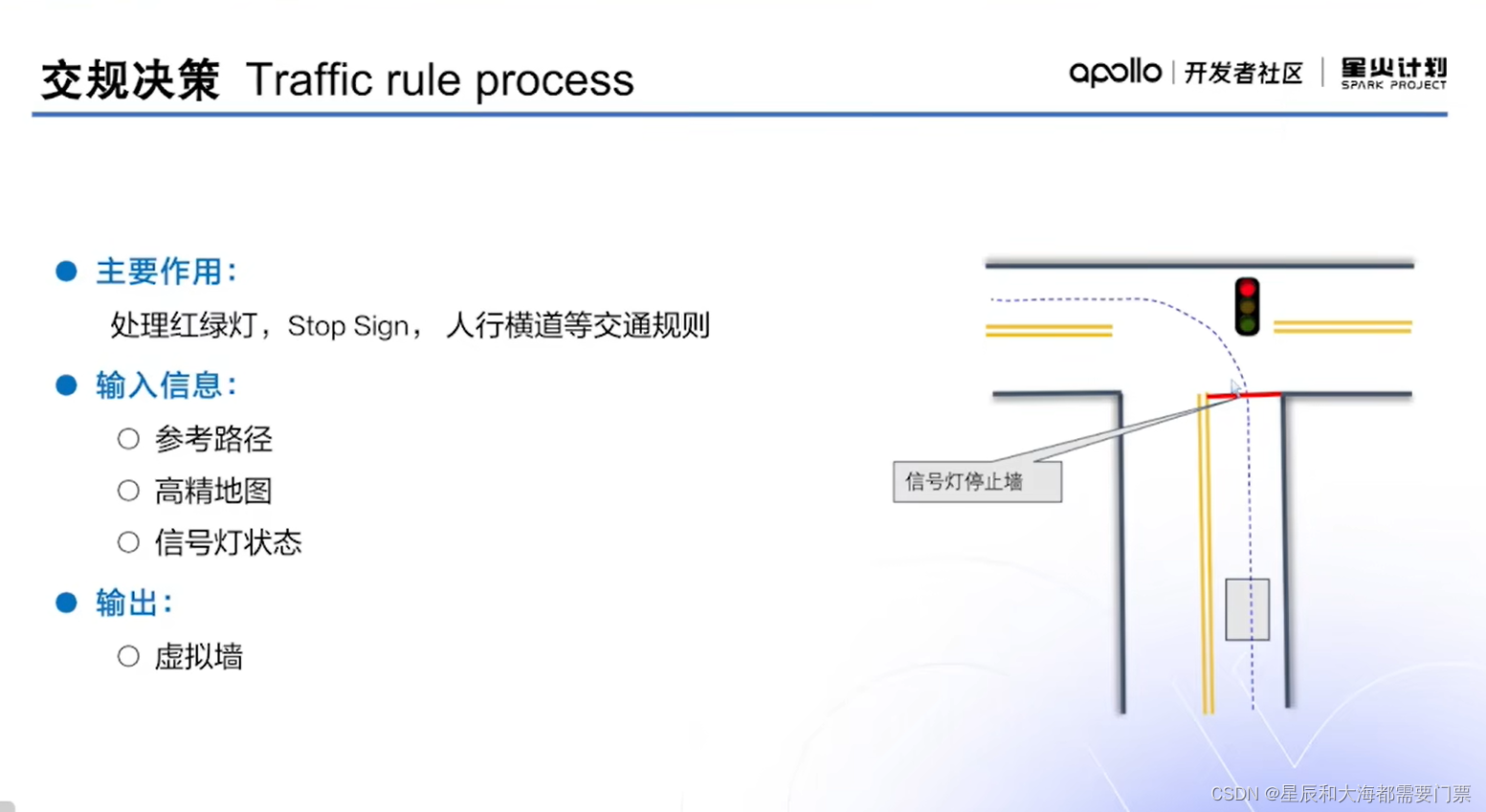
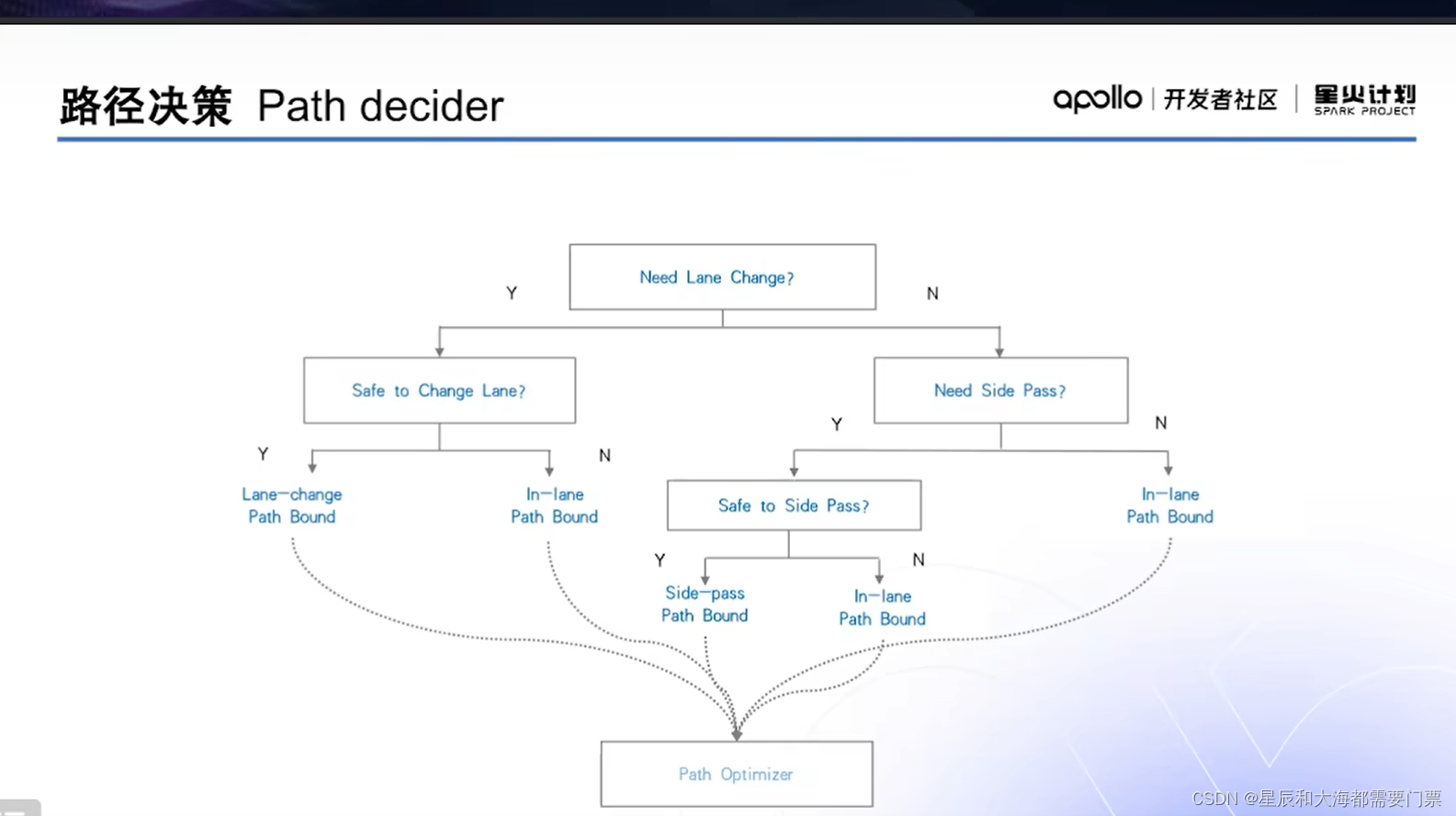
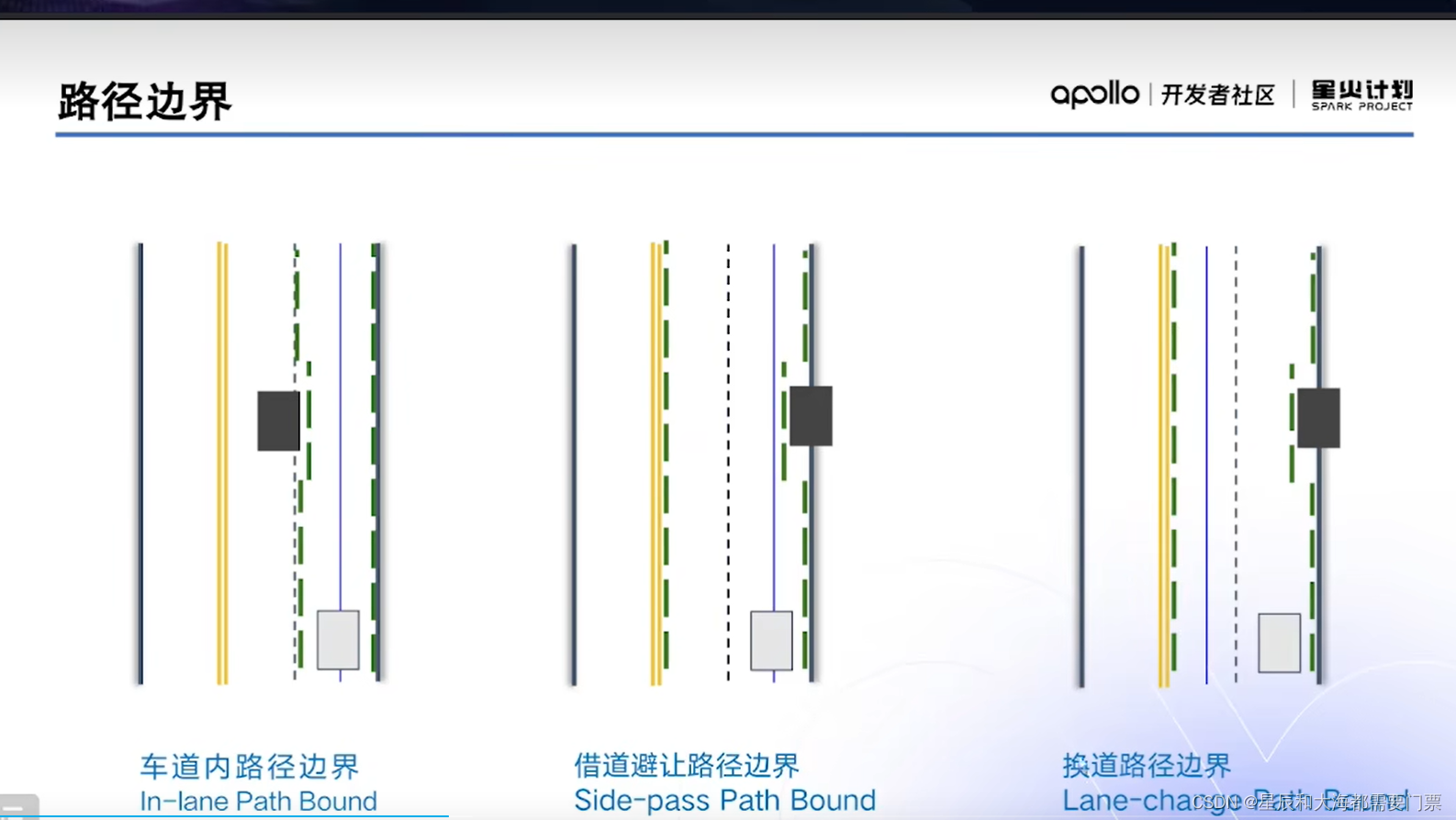
交规决策:根据路径与红绿灯状态来决定是否生成虚拟墙 路径决策 路径边界
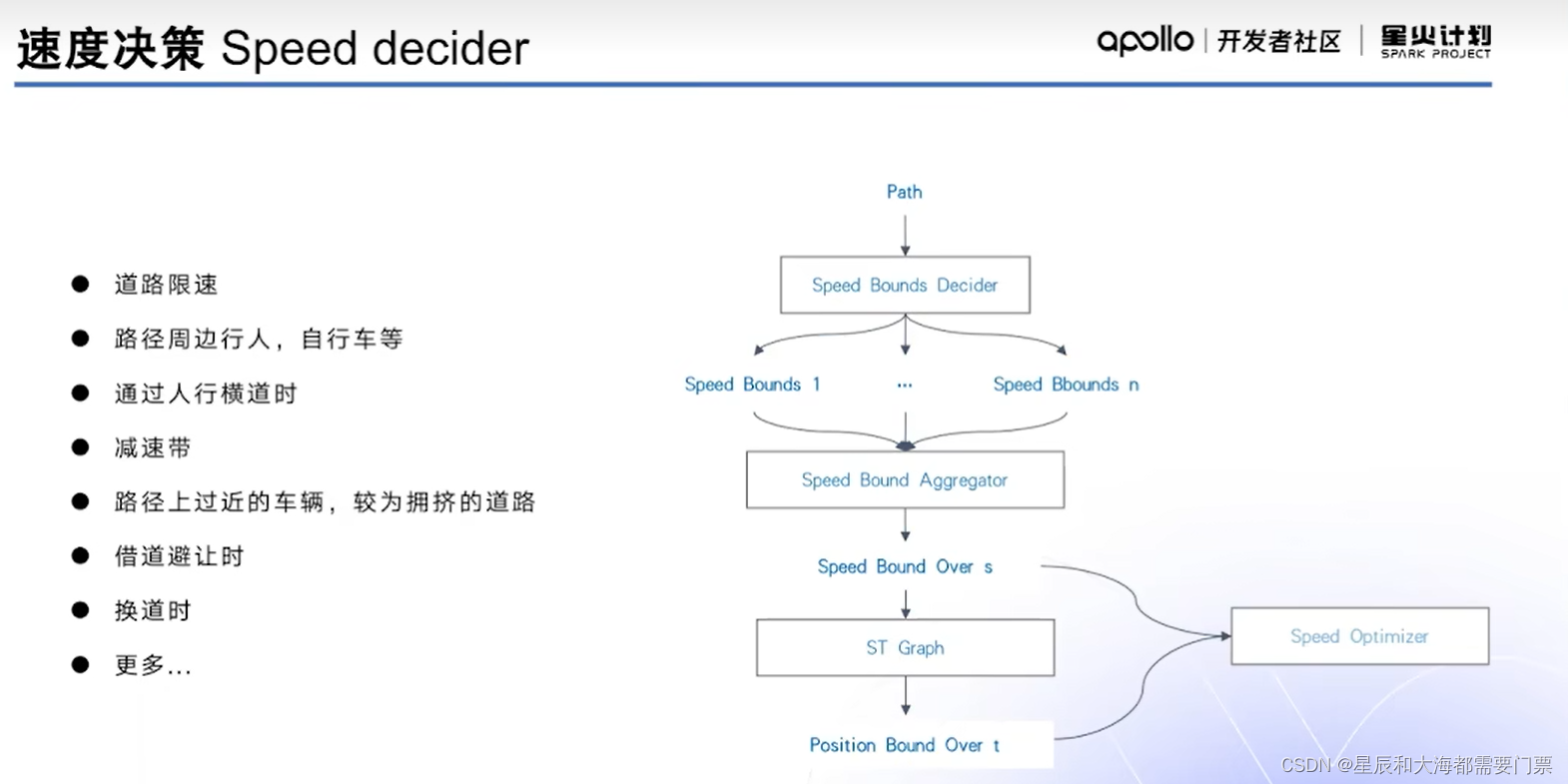
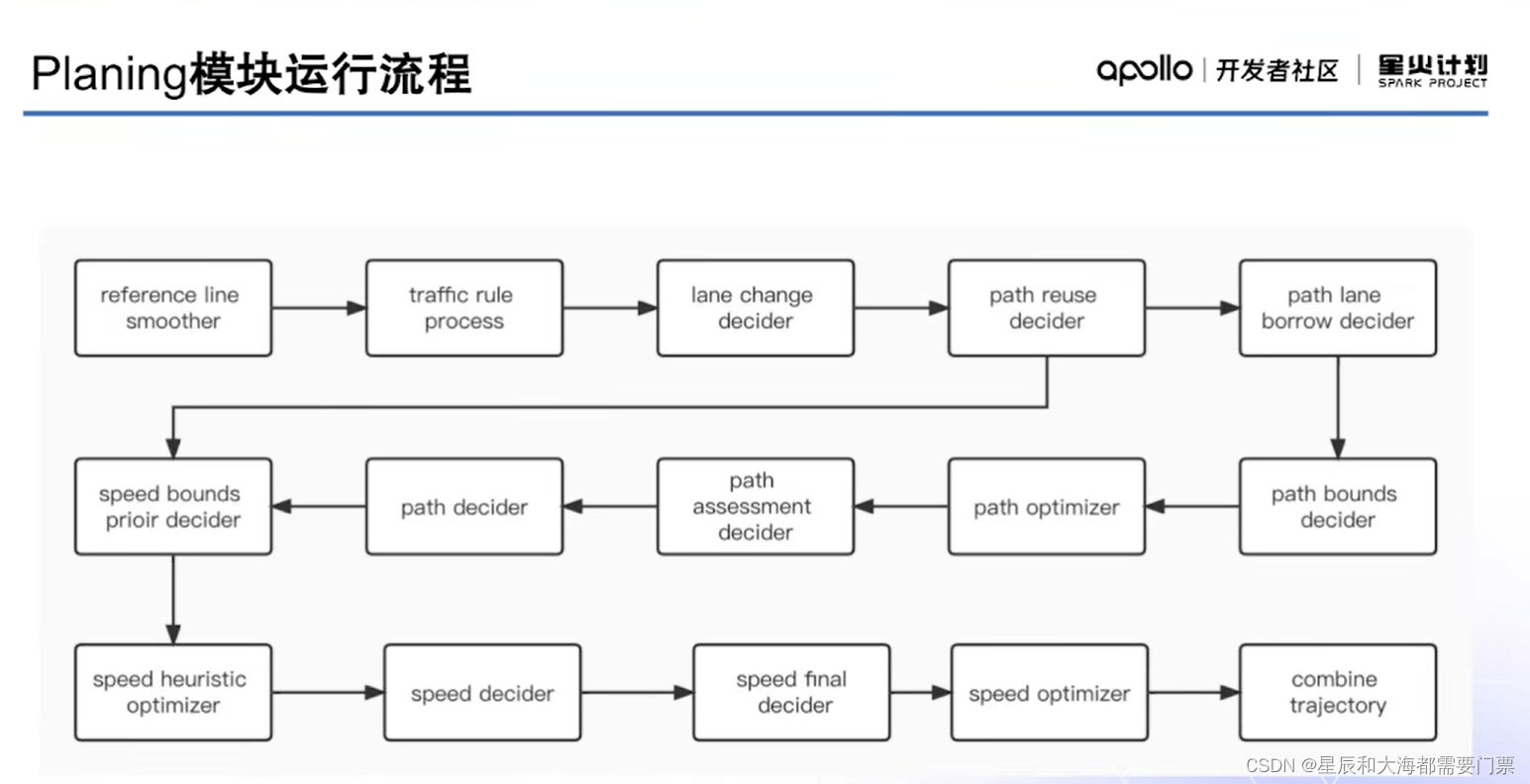
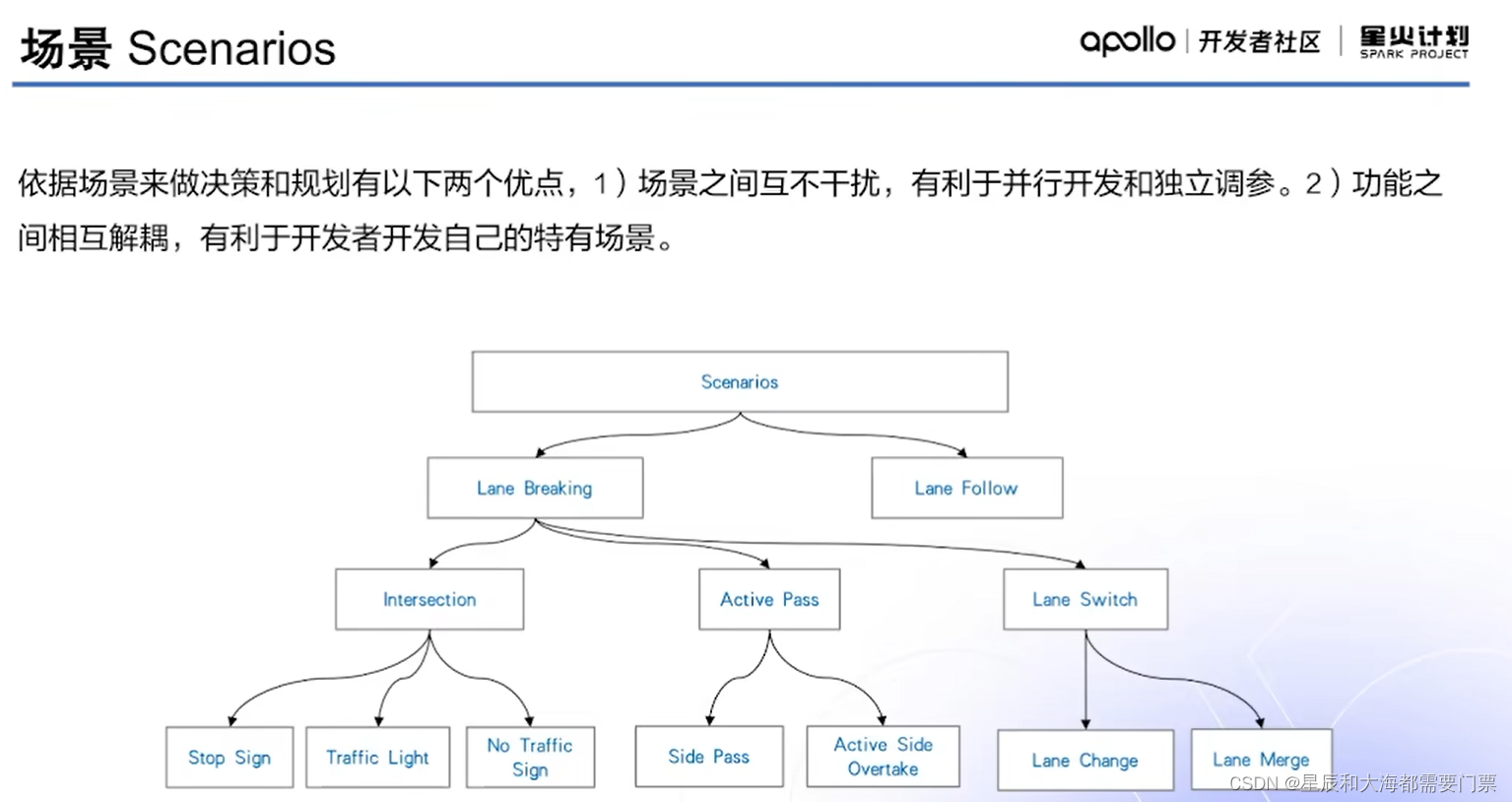
速度决策 planning模块运行流程 场景分类的例子:车道跟随(主车沿着一条车道行驶) 场景干扰(每个场景独立,进行并行开发)
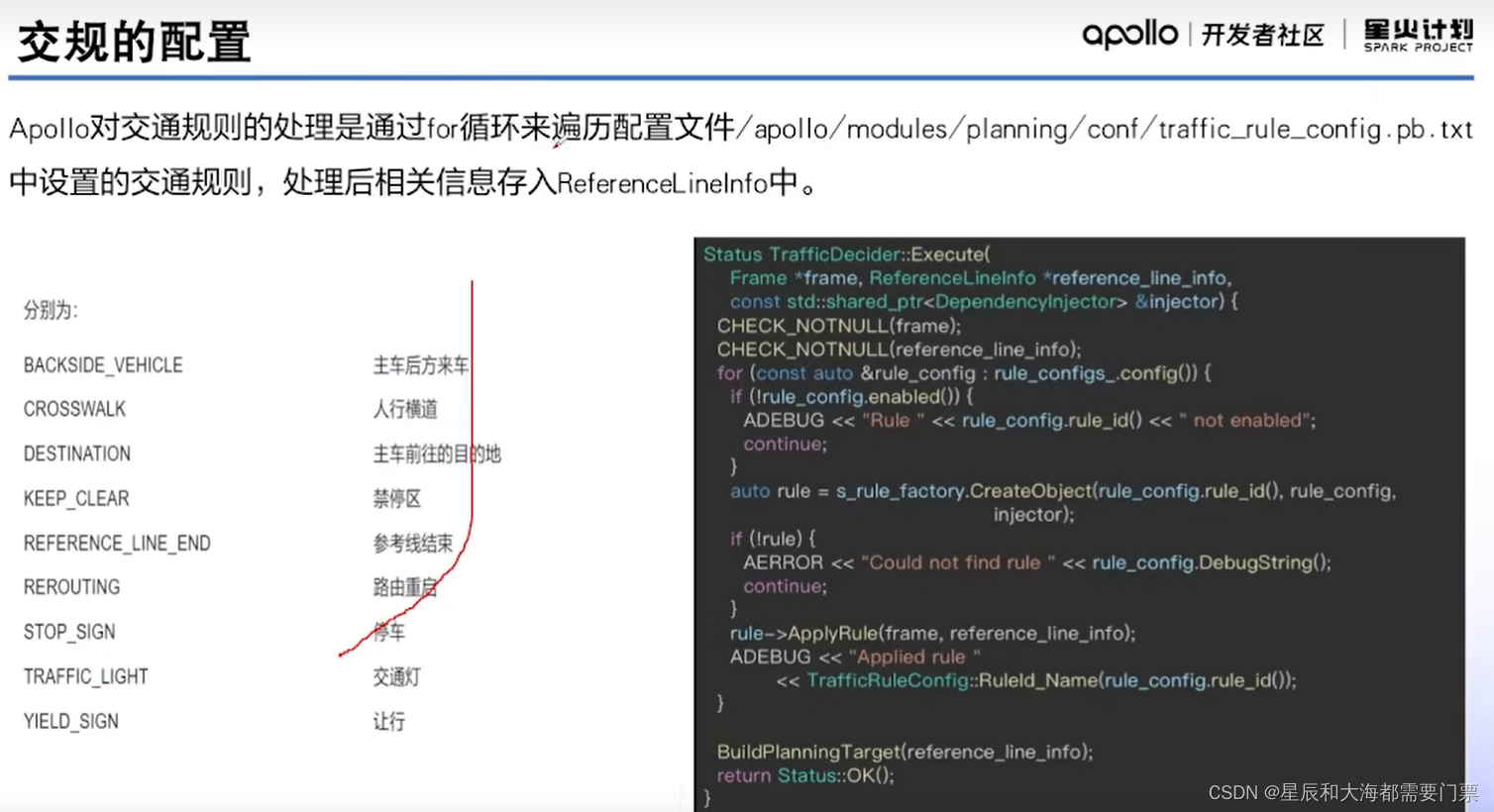
分9中情况,通过for循环遍历配置文件 每个都要实现路径决策、路径优化,速度决策与速度优化的task