一、基础概念
1.1 通信方法
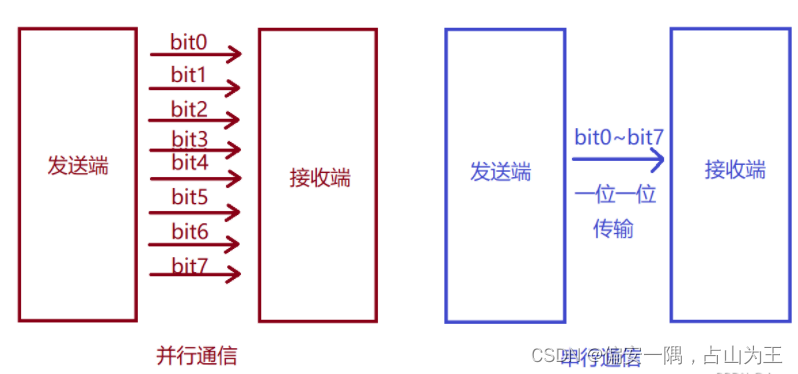
并行通信:传输原理:数据各个位同时传输;优点:速度快; 缺点:占用引脚资源多。是指使用 8、16、32 及 64 根或更多的数据线(有多少信号为就需要多少信号位)进行传输的通讯方式,可以同一时刻传输多个数据位的数据。
串行通信: 传输原理:数据按位顺序传输;优点:占用引脚资源少; 缺点:速度相对较慢。
是指设备之间通过一根数据信号线,地线以及控制信号线,按数据位形式一位一位地传输数据的通讯方式,同一时刻只能传输一位(bit)数据。

1.2 通信方向
单工: 数据传输只支持数据在一个方向上传输。信息只能单方向传输的工作方式,一个固定为发送设备,另一个固定为接收设备,发送端只能发送信息不能接收信息,接收端只能接收信息不能发送信息,只需一根信号线
半双工:允许数据在两个方向上传输,但是,在某一时刻,只允许数据在一个方向上传输,它实际上是一种切换方向的单工通信。可以实现双向的通信,但不能在两个方向上同时进行,必须轮流交替进行,其实也可以理解成一种可以切换方向的单工通信,同一时刻必须只能一个方向传输,只需一根数据线。
全双工:允许数据同时在两个方向上传输,因此,全双工通信是两个单工通信方式的结合,它要求发送设备和接收设备都有独立的接收和发送能力。在同一时刻,两个设备之间可以同时收发数据,全双工方式无需进行方向的切换,这种方式要求通讯双方均有发送器和接收器,同时,需要2根数据线。

1.3 通信方式
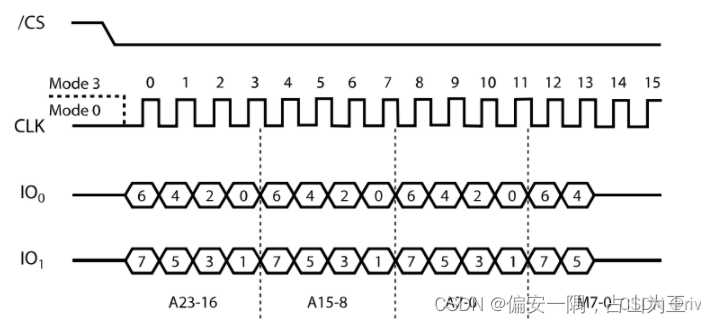
同步通信:带时钟同步信号传输。如SPI,IIC通信接口。收发设备双方会使用一根信号线表示时钟信号,在时钟信号的驱动下双方进行协调,同步数据,通讯中通常双方会统一规定在时钟信号的上升沿或下降沿对数据线进行采样,对应时钟极性与时钟相位。
I2C 的同步通信:
异步通信:不带时钟同步信号。如UART(通用异步收发器),单总线。不需要时钟信号进行数据同步,它们直接在数据信号中穿插一些同步用的信号位,或者把主体数据进行打包,以数据帧(串口:起始位 数据 校验位(可以没有) 停止位)的格式传输数据,某些通讯中还需要双方约定数据的传输速率(波特率),以便更好地同步。

1.4 电平
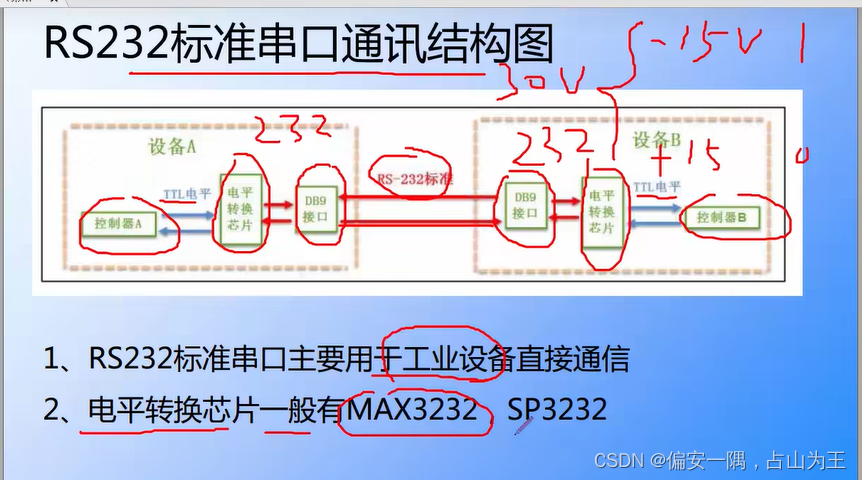
TTL电平、RS232电平、RS485电平、差分信号
RS232电平中-15V ~ -3V表示1,+3V ~ +15V表示0;
TTL电平中+5V表示1,0V表示0。
就是用不同的电压范围来表示高低电平而已
1.5 单片机的通信方式
内部通信:DMA
外部通信:TCP/UDP(非裸机开发) CAN、UART/USART(一个有时钟一个无)、SPI、I2C等

二、串口通信
USART是指单片机的一个端口模块,可以根据需要配置成同步模式(SPI,I2C,LIN),也可以将其配置为异步模式,后者就是UART。
2.1 STM32串口简介
USART-通用同步异步收发器是一个串行通信设备,可以灵活地与外部设备进行全双工数据交换。有别于 USART 还有一个UART,它是在 USART 基础上裁剪掉了同步通信功能(时钟同步),只有异步通信。简单区分同步和异步就是看通信时需不需要对外提供时钟输出,我们平时用的串口通信基本都是 UART。
串行通信一般是以帧格式传输数据,即是一帧一帧的传输,每帧包含有起始信号、数据信息、校验信息(由我们自己设置)、停止信号。
2.2 通信特点
串行通信,接地可全双工、异步通信、TTL电平
通讯协议:分为物理层和协议层。物理层规定通讯系统中具有机械、电子功能部分的特性,确保原始数据在物理媒体的传输(通俗一点就是硬件部分)。协议层主要规定通讯逻辑,统一收发双方的数据打包、解包标准(软件)。
2.3 波特率
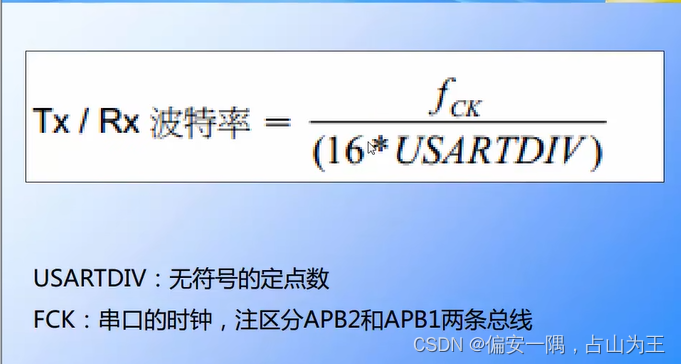
波特率,指的是串口通信的速率,也就是串口通信时每秒钟可以传输多少个二进制位。譬如,每秒钟可以传输9600个二进制位(传输一个二进制位需要的时间是1/9600秒,也就是104us),波特率就是9600。
fck是串口时钟,就是挂载在哪一条时钟线上,USARTDIV寄存器装的值
2.4 起始位、数据位、奇偶校验位、停止位
串口通信时,收发是一个周期一个周期进行的,每个周期传输n个二进制位。这一个周期就叫做一个通信单元,一个通信单元由:起始位+数据位+奇偶校验位+停止位组成的。
起始位:表示发送方要开始发送一个通信单元,起始位的定义是串口通信标准事先指定的,是由通信线上的电平变化来反映的。数据包的起始信号由一个逻辑 0 的数据位表示。
数据位:是一个通信单元中发送的有效信息位,是本次通信真正要发送的有效数据,串口通信一次发送多少位有效数据是可以设定的(可选的有6、7、8、9,一般都是选择8位数据位,因为一般通过串口发送的文字信息都是ASCII码编码,而ASCII码中一个字符刚好编码为8位)。
校验位:是用来校验数据位,以防止数据位出错的。
偶校验:校验位使得一帧中的7或8个LSB数据以及校验位中’1’的个数为偶数。
例如:数据=00110101,有4个’1’,如果选择偶校验(在USART_CR1中的PS=0),校验位将是’0’,最后数据检验如果数据有偶数个1则数据传输没有出错(但不是绝对的,如果同时两个数据为发送错误(0变成1)则还是偶数个1)。
奇校验:此校验位使得一帧中的7或8个LSB数据以及校验位中’1’的个数为奇数。
例如:数据=00110101,有4个’1’,如果选择奇校验(在USART_CR1中的PS=1),校验位将是’1’,最后数据检验如果数据有奇数个1则数据传输没有出错,但同样不是绝对的(同时两个1变成0)
停止位:是发送方用来表示本通信单元结束标志的,停止位的定义是串口通信标准事先指定的,是由通信线上的电平变化来反映的。常见的有1位停止位、1.5位停止位、2位停止位等,一般使用的是1位停止位。数据包的停止信号可由 0.5、1、1.5 或 2 个逻辑 1 的数据位表示。
1个停止位:停止位位数的默认值。
2个停止位:可用于常规USART模式、单线模式以及调制解调器模式。
0.5个停止位:在智能卡模式下接收数据时使用。
1.5个停止位:在智能卡模式下发送和接收数据时使用。
2.5 数据发送
transmitter由发送缓冲区和发送移位寄存器构成。我们要发送信息时,首先将信息进行编码(一般用ASCII码)成二进制流,然后将一帧数据(一般是8位)写入发送缓冲区(从这里以后程序就不用管了,剩下的发送部分由硬件自动完成),最后发送移位寄存器会自动从发送缓冲区中读取一帧数据,然后自动移位(移位的目的是将一帧数据的各个位分别拿出来)将其发送到Tx通信线上。
receiver由接收缓冲区和接收移位寄存器构成。当有人通过串口线向我发送信息时,信息通过Rx通信线进入我的接收移位寄存器中,然后接收移位寄存器自动移位并将该二进制位保存入我的接收缓冲区,接收完一帧数据后receiver会产生一个中断给CPU,CPU收到中断后即可知道receiver接收满了一帧数据,就会来读取这帧数据。
2.6 USB转串口

USB转串口电平的电平转换芯片一般有CH340、PL2303、CP2102、FT232
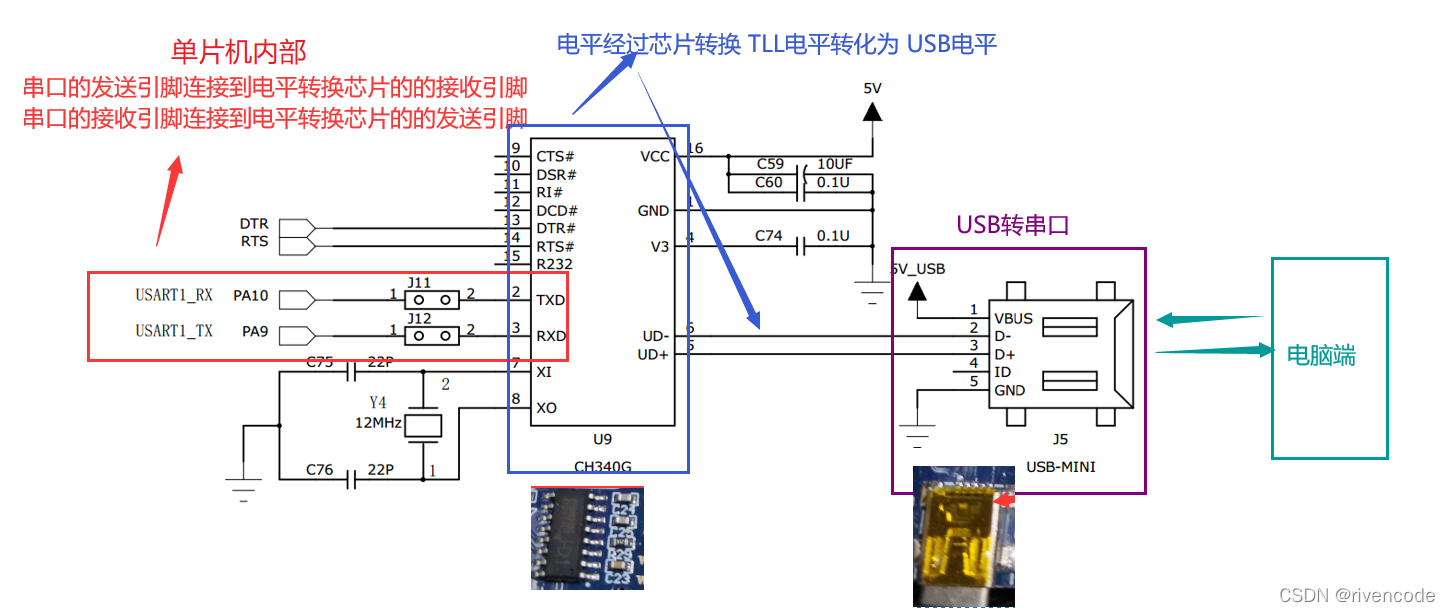
原生的串口通信主要是控制器跟串口的设备或者传感器通信他们但是TLL电平,不需要经过电平转换芯片来转换电平,直接就用TTL电平通信,GPS模块、GSM模块、串口转WIFI模块、HC04蓝牙模块 。
2.7 FIFO模式和DMA模式
典型的串口设计,发送/接收缓冲区只有1字节,每次发送/接收只能处理1帧数据。这样在单片机中没什么问题,但是到复杂SOC中(一般有操作系统的)就会有问题,会导致效率低下,因为CPU需要不断切换上下文。 解决方案就是想办法扩展串口控制器的发送/接收缓冲区,譬如将发送/接收缓冲区设置为64字节,CPU一次过来直接给发送缓冲区64字节的待发送数据,然后transmitter慢慢发送,发送完再找CPU再要64字节数据。但是串口控制器本来的发送/接收缓冲区是固定的1字节大小的,所有做了个变相的扩展,就是FIFO。CPU先将64字节的数据放到FIFO中,然后启动FIFO模式,FIFO每次会自动往发送缓冲区中添加1字节数据,最后进行移位操作传输数据。
DMA,就是direct memory access,直接内存访问。DMA本来是DSP中的一种技术,DMA技术的核心就是在交换数据时不需要CPU参与,模块可以自己完成。 DMA模式要解决的问题和上面FIFO模式是同一个问题,就是串口发送/接收要频繁的折腾CPU造成CPU反复切换上下文导致系统效率低下。
2.8 串口通信与中断的关系
串口通信分为发送/接收两部分,发送一般不需要中断即可完成发送,接收一般需要使用中断来接收。
发送方可以选择使用中断,也可以选择不使用中断。使用中断的工作情景是:发送方先设置好中断并绑定一个中断处理程序,然后发送方丢一帧数据给transmitter,transmitter耗费一段时间来发送这一帧数据,这段时间内发送方CPU可以去做别的事情,等transmitter发送完成后会产生一个TXD中断,该中断会导致事先绑定的中断处理程序执行,在中断处理程序中CPU会切换回来继续给transmitter放一帧数据,然后CPU切换离开;不使用中断的工作情景是:发送方事先禁止TXD中断(当然也不需要给相应的中断处理程序了),发送方CPU给一帧数据到transmitter,然后transmitter耗费一段时间来发送这帧数据,这段时间CPU在这等着(CPU没有切换去做别的事情),待发送方发送完成后CPU再给它一帧数据继续发送直到所有数据发完。CPU是怎么知道transmitter已经发送完了?原来是有个状态寄存器,状态寄存器中有一个位叫发送缓冲区空标志,transmitter发送完成(发送缓冲区空了)就会给这个标志位置1,CPU就是通过不断查询这个标志位为1还是0来知道发送是否已经完成的。
接收方可以选择使用中断,也可以选择不使用中断。使用中断的工作情景是:接收方先设置好中断并绑定一个中断处理程序,然后接收方会耗费一段时间从receiver中来接收一帧数据,这段时间内接收方CPU可以去做别的事情,等receiver接收数据完成后会产生一个RXD中断,该中断会导致事先绑定的中断处理程序执行,在中断处理程序中CPU会切换回来从receiver中读取数据,然后CPU切换离开;不使用中断的工作情景是:接收方事先禁止RXD中断(当然也不需要给相应的中断处理程序了),接收方会耗费一段时间从receiver中接收一帧数据,这段时间CPU在这等着(CPU没有切换去做别的事情),待接收方接收完成后CPU会继续等着直到所有数据接收完。CPU是怎么知道receiver已经接收完了?原来是有个状态寄存器,状态寄存器中有一个位叫接收缓冲区满标志,receiver接收完成(接收缓冲区满了)就会给这个标志位置1,CPU就是通过不断查询这个标志位为1还是0来知道接收是否已经完成的。
因为串口通信是异步的,异步的意思就是说发送方占主导权。也就是说发送方随时想发就能发,但是接收方只有时刻等待才不会丢失数据。所以这个差异就导致发送方可以不用中断,而接收方不得不使用中断模式。
2.9串口通信为什么需要时钟?
因为串口通信需要一个固定的波特率,所以transmitter和receiver都需要一个时钟信号。
时钟信号从哪里来?源时钟信号是外部APB总线(PCLK_PSYS,66MHz)提供给串口模块的(这就是为什么我们说串口是挂在APB总线上的),然后进到串口控制器内部后给波特率发生器(实质上是一个分频器),在波特率发生器中进行分频,分频后得到一个低频时钟,这个时钟就是给transmitter和receiver使用的。
2.10 串口程序
2.11 串口篇参考资料
STM32串口通信详解_rivencode的博客-CSDN博客_stm32串口通信
串口通信详解_泪无痕z的博客-CSDN博客_串口通信
三、CAN通信
几个概念:
CAN 发送邮箱:
CAN 接收 FIFO:
验收筛选器:
1.标准帧和扩展帧的区分(帧格式)
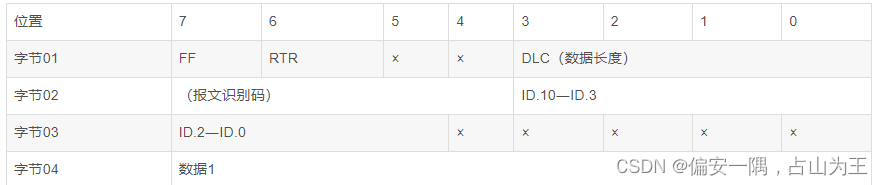
CAN 标准帧信息为11个字节,包括两部分:信息和数据部分。前3个字节为信息部分。后面8个字节是CAN报文数据位。
字节1为帧信息。第7位(FF)表示帧格式,在标准帧中,FF=0;第6位(RTR)表示帧的类型,RTR=0表示为数据帧,RTR=1表示为远程帧;DLC表示在数据帧时实际的数据长度。
字节2、3为报文识别码,11位有效。
字节4~1为数据帧的实际数据,远程帧时无效。
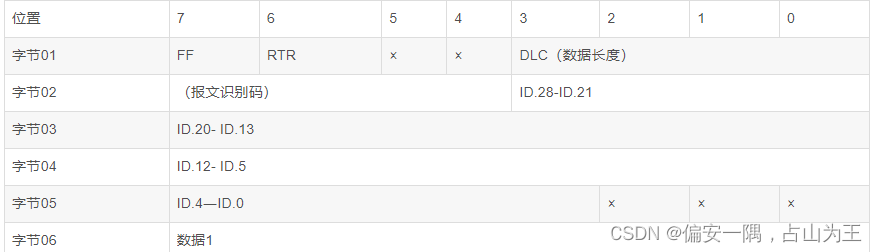
CAN 扩展帧信息为13个字节,包括两部分,信息和数据部分。前5个字节为信息部分 。
字节1为帧信息。第7位(FF)表示帧格式,在扩展帧中,FF=1;第6位(RTR)表示帧的类型,RTR=0表示为数据帧,RTR=1表示为远程帧;DLC 表示在数据帧时实际的数据长度。
字节2~5为报文识别码,其高29位有效。
字节6~13数据帧的实际数据,远程帧时无效。
1.2 5种帧类型(数据帧、远程帧、错误帧、过载帧、 帧间隔)
帧结构:

数据帧:传输负责“安全及校验”“网络管理”“功能数据”的报文;RTR=0时为数据帧;
远程帧(遥控帧):请求其它节点发出与本遥控帧具有相同ID号的数据帧,遥控的目的仅仅是请求,为保证数据的传输因此优先级低于数据帧;RTR=1时为遥控帧;
拓展帧:解决CAN标准帧的11位标识符不够用的情况,因此扩展帧的优先级总是低于标准帧;IDE=1是扩展帧,因此数据帧(遥控帧)也分拓展和标准(不拓展)两种情况。
错误帧:反馈错误状态,vector的测试工具针对这几种帧的error code也有专门的定义,常见的ack测试中error code=0x1fa,(int)(0x1fa>>6)=7;
帧间隔:隔离数据帧(或者遥控帧)的,节点为被动错误状态时帧间隔为11位隐形,借此主动放弃总线的占有权。另注意过载帧和错误帧的前面不能插入帧间隔。
3.1 CAN通信简介
CAN通讯的数据传输方式类似于电话会议或者视频会议,一个人发送信息,其他人共同收听。对该信息有兴趣的人,使用这些信息,另一些对该信息不感兴趣的人将其丢弃。(CAN ID的过滤)
3.1.1 通讯节点
从 CAN 通讯网络图可了解到,CAN 总线上可以挂载多个通讯节点,节点之间的信号经过总线传输,实现节点间通讯。由于 CAN 通讯协议不对节点进行地址编码,而是对数据内容进行编码的(也就是后面说的CAN id),所以网络中的节点个数理论上不受限制,只要总线的负载足够即可,可以通过中继器增强负载。
CAN 通讯节点由一个 CAN 控制器及 CAN 收发器组成,控制器与收发器之间通过 CAN_Tx 及CAN_Rx 信号线相连,收发器与 CAN 总线之间使用 CAN_High 及 CAN_Low 信号线相连。其中CAN_Tx 及 CAN_Rx 使用普通的类似 TTL 逻辑信号,而 CAN_High 及 CAN_Low 是一对差分信号线,使用比较特别的差分信号。当 CAN 节点需要发送数据时,控制器把要发送的二进制编码通过 CAN_Tx 线发送到收发器,然后由收发器把这个普通的逻辑电平信号转化成差分信号,通过差分线 CAN_High 和 CAN_Low 线输出到 CAN 总线网络。而通过收发器接收总线上的数据到控制器时,则是相反的过程,收发器把总线上收到的 CAN_High 及 CAN_Low 信号转化成普通的逻辑电平信号,通过 CAN_Rx 输出到控制器中。
这些上面已经说了。
3.1.2 差分信号
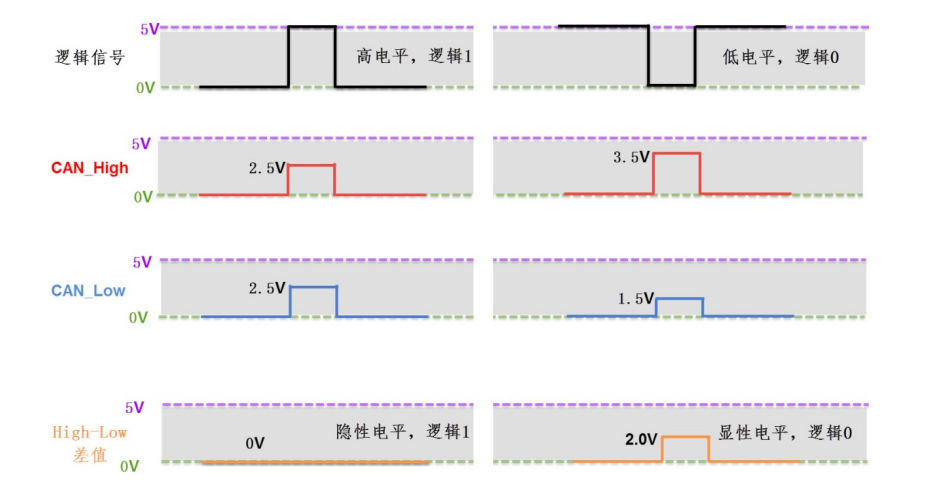
差分信号又称差模信号,与传统使用单根信号线电压表示逻辑的方式有区别,使用差分信号传输时,需要两根信号线,这两个信号线的振幅相等,相位相反,通过两根信号线的电压差值来表示。逻辑 0 和逻辑 1。
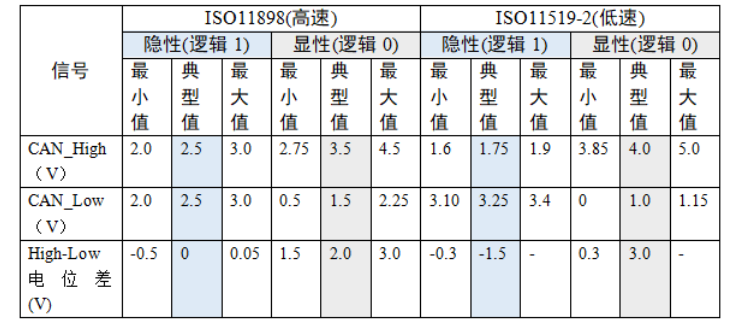
CAN 协议中对它使用的 CAN_High 及 CAN_Low 表示的差分信号做了规定。以高速 CAN 协议为例,当表示逻辑 1 时 (隐性电平) ,CAN_High 和 CAN_Low 线上的电压均为 2.5v,即它们的电压差 VH-V:sub:L=0V;而表示逻辑 0 时 (显性电平) ,CAN_High 的电平为 3.5V,CAN_Low 线的电平为 1.5V,即它们的电压差为 VH-V:sub:L=2V。例如,当 CAN收发器从 CAN_Tx 线接收到来自 CAN 控制器的低电平信号时 (逻辑 0),它会使 CAN_High 输出3.5V,同时 CAN_Low 输出 1.5V,从而输出显性电平表示逻辑 0 。
Value = CAN_High - CAN_Low,Value 在-0.5-0.05之间是隐性电平,是逻辑1。注意这里的隐性只是一个概念,也就是说在CAN协议里面把逻辑1高电平不说是高电平了,改了个名字是隐性电平而已。
相对于单信号线传输的方式,使用差分信号传输具有如下优点:(了解即可)
抗干扰能力强,当外界存在噪声干扰时,几乎会同时耦合到两条信号线上,而接收端只关心两个信号的差值,所以外界的共模噪声可以被完全抵消。
举一个例子,正常的单线假设逻辑1是3.3V,逻辑0假设是0V,但是如果有噪声,把3.3V弄成了0V(极端),把0V弄成了-3.3V,此时就逻辑错误,但是有Can高/Can低一般都作用于两根线,所以两个虽然都有噪声影响,但是差值还是不变的
能有效抑制它对外部的电磁干扰,同样的道理,由于两根信号的极性相反,他们对外辐射的电磁场可以相互抵消,耦合的越紧密,泄放到外界的电磁能量越少。
举一个例子,假设一根是10V,一根是-10V,单跟都会对外部造成电磁干扰,但是CAN可以把线拧在一起,跟编麻花一样,可以互相抵消电子干扰
时序定位精确,由于差分信号的开关变化是位于两个信号的交点,而不像普通单端信号依靠高低两个阈值电压判断,因而受工艺,温度的影响小,能降低时序上的误差,同时也更适合于低幅度信号的电路。
由于差分信号线具有这些优点,所以在USB 协议、485 协议、以太网协议及 CAN 协议的物理层中,都使用了差分信号传输。
由于 CAN 总线协议的物理层只有 1 对差分线,在一个时刻只能表示一个信号,所以对通讯节点来说,CAN 通讯是半双工的,收发数据需要分时进行。在 CAN 的通讯网络中,因为共用总线,在整个网络中同一时刻只能有一个通讯节点发送信号,其余的节点在该时刻都只能接收。这里注意一下,同时只能有一个发送,但理论上可以有无限多个接收。
3.2 CAN物理层
与 I2C、SPI 等具有时钟信号的同步通讯方式不同,CAN 通讯并不是以时钟信号来进行同步的,它是一种异步通讯,只具有CAN_High 和 CAN_Low 两条信号线,共同构成一组差分信号线,以差分信号的形式进行通讯。
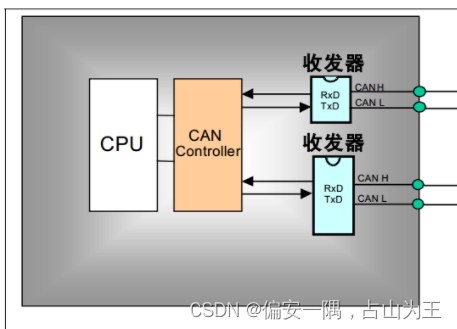
如上图,CPU到CAN控制器之间的信号还是TTL信号,CAN控制器到CAN收发器后,收发器将CAN的TTL信号转化为差分信号(发送,接收相反:收发器将差分转为TTL)。
CAN 物理层的形式主要有两种。
3.2.1 闭环总线网络
图中的 CAN 通讯网络是一种遵循 ISO11898 标准的高速、短距离“闭环网络”,它的总线最大长度为 40m,通信速度最高为 1Mbps,总线的两端各要求有一个“120 欧”的电阻。

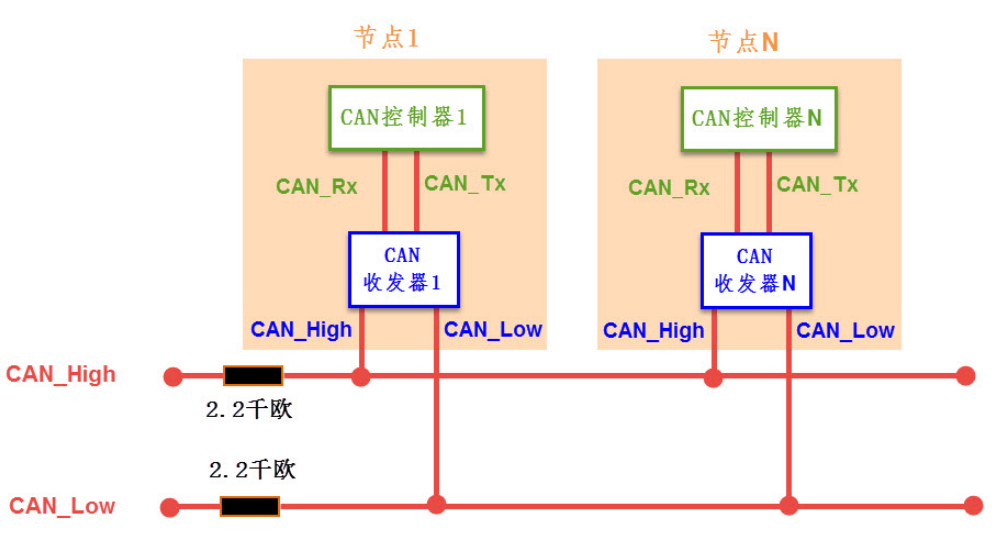
3.2.2 开环总线网络
图中的是遵循 ISO11519-2 标准的低速、远距离“开环网络”,它的最大传输距离为 1km,最高通讯速率为 125kbps,两根总线是独立的、不形成闭环,要求每根总线上各串联有一个“2.2千欧”的电阻。这种用的少
3.3 数据链路层
CAN总线传输的是CAN帧,CAN的通信帧分成五种,分别为数据帧、远程帧、错误帧、过载帧和帧间隔。
3.4 协议层
由于CAN属于异步通讯,没有时钟信号线,连接在同一个总线网络中的各个节点会像串口异步通讯那样,节点间使用约定好的波特率进行通讯,特别地,CAN 还会使用“位同步”的方式来抗干扰、吸收误差,实现对总线电平信号进行正确的采样,确保通讯正常。
3.4.1 位时序分解
这里先说明一下什么是位,很简单,就是一个bit,一个字节总该知道,一个字节是8个bit,就应该知道说明是bit了。第二个概念是Tq,它是一个时间单位,很小的。第三个概念是采样点,字面意思,就是在哪个点开始采样,什么是采样?采样就是采集这一点的数据,比如说下图的第一个低电平段,CPU怎么知道此时是低电平?所以就要采集该段的电平值,那又从这一小段的哪个位置来采集此时的电平值呢?显然在下降沿或上升沿地方采样肯定不准确,下面就讨论了在低电平段的什么位置采样才最好。为了实现位同步,CAN 协议把每一个数据位的时序分解成如图 所示的 SS 段、PTS 段、PBS1 段、PBS2 段,这四段的长度加起来即为一个 CAN 数据位的长度。分解后最小的时间单位是 Tq,而一个完整的位由 8~25 个 Tq 组成。为方便表示,图中的高低电平直接代表信号逻辑0或逻辑 1(不是差分信号)。
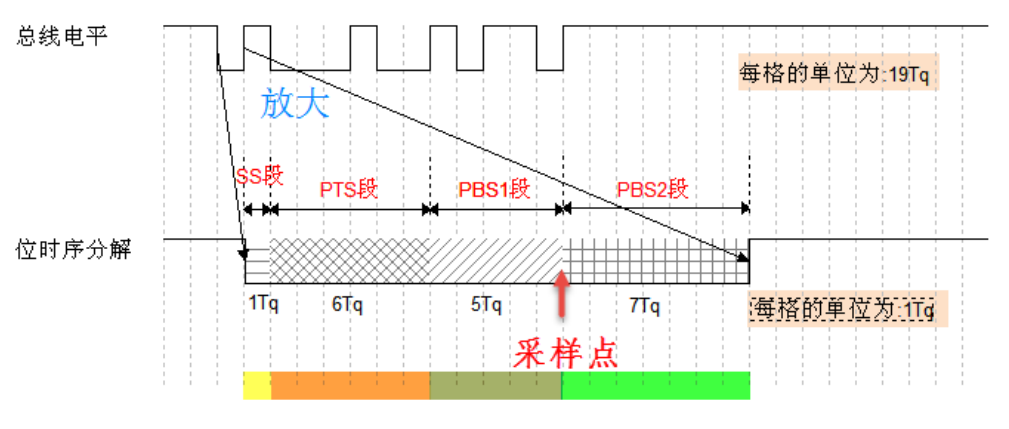
该图中表示的 CAN 通讯信号每一个数据位的长度为 19Tq,其中 SS 段占 1Tq, PTS 段占 6Tq, PBS1段占 5Tq, PBS2 段占 7Tq。信号的采样点位于 PBS1 段与 PBS2 段之间,通过控制各段的长度,可以对采样点的位置进行偏移,以便准确地采样。
SS 段 (SYNC SEG)
SS 译为同步段,若通讯节点检测到总线上信号的跳变沿被包含在SS 段的范围之内,则表示节点与总线的时序是同步的,当节点与总线同步时,采样点采集到的总线电平即可被确定为该位的电平。SS 段的大小固定为 1Tq。
PTS 段 (PROP SEG)
PTS 译为传播时间段,这个时间段是用于补偿网络的物理延时时间。是总线上输入比较器延时和输出驱动器延时总和的两倍。PTS 段的大小可以为 1~8Tq。
PBS1 段 (PHASE SEG1)
PBS1 译为相位缓冲段,主要用来补偿边沿阶段的误差,它的时间长度在重新同步的时候可以加长。PBS1 段的初始大小可以为 1~8Tq。
PBS2 段 (PHASE SEG2)
PBS2 这是另一个相位缓冲段,也是用来补偿边沿阶段误差的,它的时间长度在重新同步时可以缩短。PBS2 段的初始大小可以为 2~8Tq。
总线上的各个通讯节点只要约定好 1 个 Tq 的时间长度以及每一个数据位占据多少个 Tq,就可以确定 CAN 通讯的波特率。
3.4.2 通讯的波特率
例如,假设上图中的 1Tq=1us,而每个数据位由 19 个 Tq 组成,则传输一位数据需要时间 T1bit=19us,从而每秒可以传输的数据位个数为:1x10次方/19 = 52631.6 (bps)
这个每秒可传输的数据位的个数即为通讯中的波特率,所以说波特率就是约定了每秒可传输的数据位的个数。
重点:如何进行同步?
波特率只是约定了每个数据位的长度,数据同步还涉及到相位的细节,这个时候就需要用到数据位内的 SS、PTS、PBS1 及 PBS2 段了。根据对段的应用方式差异, CAN 的数据同步分为硬同步和重新同步。其中硬同步只是当存在“帧起始信号”时起作用,无法确保后续一连串的位时序都是同步的,而重新同步方式可解决该问题,这两种方式具体介绍如下:
(1) 硬同步
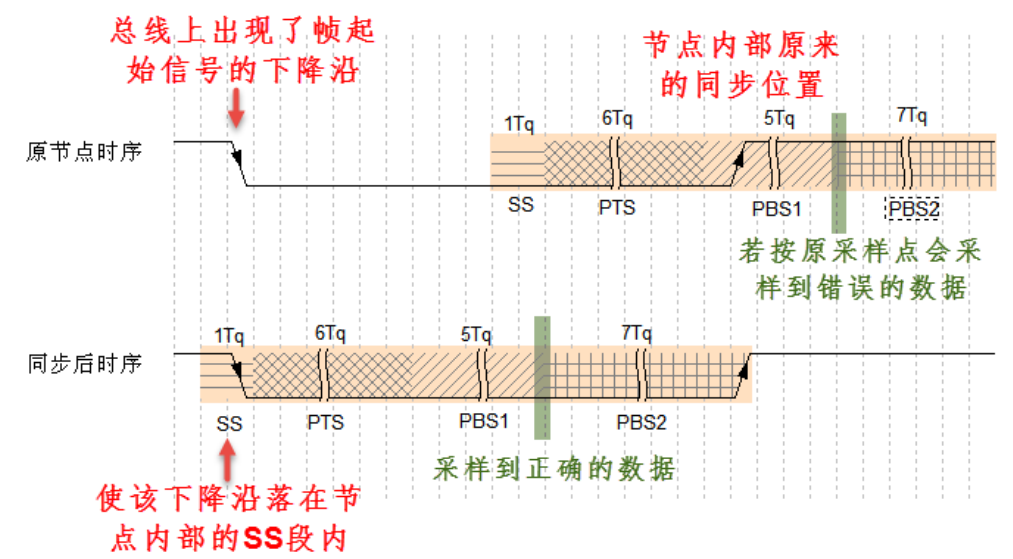
若某个 CAN 节点通过总线发送数据时,它会发送一个表示通讯起始的信号 (即下一小节介绍的帧起始信号),该信号是一个由高变低的下降沿。而挂载到 CAN 总线上的通讯节点在不发送数据时,会时刻检测总线上的信号。见图 ,可以看到当总线出现帧起始信号时,某节点检测到总线的帧起始信号不在节点内部时序的 SS 段范围,所以判断它自己的内部时序与总线不同步,因而这个状态的采样点采集得的数据是不正确的。所以节点以硬同步的方式调整,把自己的位时序中的 SS 段平移至总线出现下降沿的部分,获得同步,同步后采样点就可以采集得正确数据了。
(2) 重新同步
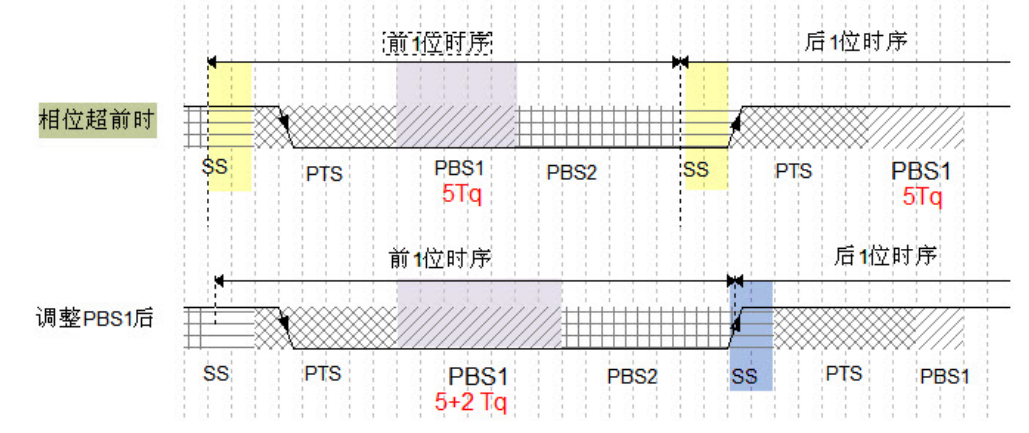
前面的硬同步只是当存在帧起始信号时才起作用,如果在一帧很长的数据内,节点信号与总线信号相位有偏移时,这种同步方式就无能为力了。因而需要引入重新同步方式,它利用普通数据位的高至低电平的跳变沿来同步 (帧起始信号是特殊的跳变沿)。重新同步与硬同步方式相似的地方是它们都使用 SS 段来进行检测,同步的目的都是使节点内的 SS 段把跳变沿包含起来。重新同步的方式分为超前和滞后两种情况,以总线跳变沿与 SS 段的相对位置进行区分。第一种相位超前的情况如图 ,节点从总线的边沿跳变中,检测到它内部的时序比总线的时序相对超前 2Tq,这时控制器在下一个位时序中的 PBS1 段增加 2Tq 的时间长度,使得节点与总线时序重新同步。
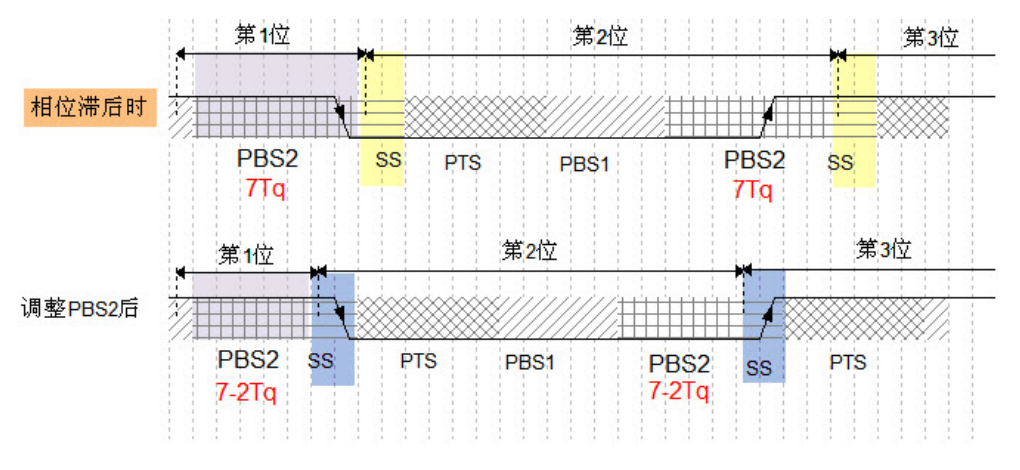
第二种相位滞后的情况如图 ,节点从总线的边沿跳变中,检测到它的时序比总线的时序相对滞后 2Tq,这时控制器在前一个位时序中的 PBS2 段减少 2Tq 的时间长度,获得同步。
 在重新同步的时候,PBS1 和 PBS2 中增加或减少的这段时间长度被定义为“重新同步补偿宽度SJW* (reSynchronization Jump Width)”。一般来说 CAN 控制器会限定 SJW 的最大值,如限定了最大 SJW=3Tq 时,单次同步调整的时候不能增加或减少超过 3Tq 的时间长度,若有需要,控制器会通过多次小幅度调整来实现同步。当控制器设置的 SJW 极限值较大时,可以吸收的误差加大,但通讯的速度会下降。
在重新同步的时候,PBS1 和 PBS2 中增加或减少的这段时间长度被定义为“重新同步补偿宽度SJW* (reSynchronization Jump Width)”。一般来说 CAN 控制器会限定 SJW 的最大值,如限定了最大 SJW=3Tq 时,单次同步调整的时候不能增加或减少超过 3Tq 的时间长度,若有需要,控制器会通过多次小幅度调整来实现同步。当控制器设置的 SJW 极限值较大时,可以吸收的误差加大,但通讯的速度会下降。
3.4.3 CAN 的报文种类及结构
在SPI通讯中,片选、时钟信号、数据输入及数据输出这4个信号都有单独的信号线,I2C协议包含有时钟信号及数据信号2条信号线,异步串口包含接收与发送 2 条信号线,这些协议包含的信号都比CAN协议要丰富,它们能轻易进行数据同步或区分数据传输方向。而CAN 使用的是两条差分信号线,只能表达一个信号,简洁的物理层决定了CAN 必然要配上一套更复杂的协议,如何用一个信号通道实现同样、甚至更强大的功能呢?CAN 协议给出的解决方案是对数据、操作命令 (如读/写) 以及同步信号进行打包,打包后的这些内容称为报文。这里再做一些说明,注意CAN报文的数据段,我们要的就是数据段的内容,但在CAN总线上传输的CAN报文,肯定不是只有CAN数据段的,其他内容有的是我们通过程序来加的,有的是物理层或者数据链路层自己加的,物理层或者数据链路层自己加的在接收的时候自然由硬件进行拆包。
在原始数据段的前面加上传输起始标签、片选 (识别) 标签和控制标签,在数据的尾段加上 CRC校验标签、应答标签和传输结束标签,把这些内容按特定的格式打包好,就可以用一个通道表达各种信号了,各种各样的标签就如同 SPI 中各种通道上的信号,起到了协同传输的作用。当整个数据包被传输到其它设备时,只要这些设备按格式去解读,就能还原出原始数据,这样的报文就被称为 CAN 的“数据帧”。
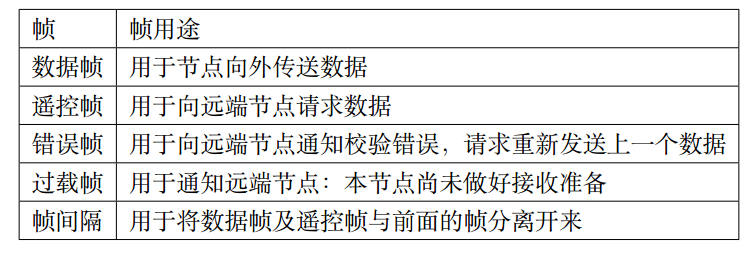
为了更有效地控制通讯,CAN 一共规定了 5 种类型的帧,它们的类型及用途说明如表:
1. 数据帧
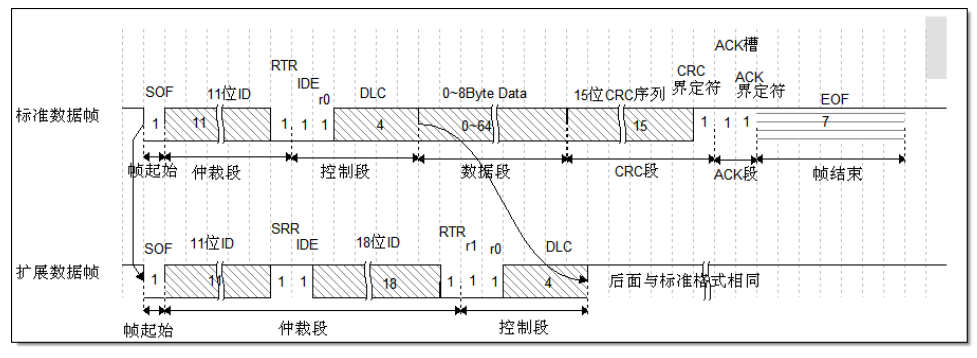 数据帧以一个显性位 (逻辑 0) 开始,以 7 个连续的隐性位 (逻辑 1) 结束,在它们之间,分别有仲裁段、控制段、数据段、CRC 段和 ACK 段。
数据帧以一个显性位 (逻辑 0) 开始,以 7 个连续的隐性位 (逻辑 1) 结束,在它们之间,分别有仲裁段、控制段、数据段、CRC 段和 ACK 段。
仲裁段:解决两个报文被同时发送该发哪个的问题。
帧起始:SOF 段 (Start OfFrame),译为帧起始,帧起始信号只有一个数据位,是一个显性电平,它用于通知各个节点将有数据传输,其它节点通过帧起始信号的电平跳变沿来进行硬同步。
SOF 段 (Start OfFrame),译为帧起始,帧起始信号只有一个数据位,是一个显性电平,它用于通知各个节点将有数据传输,其它节点通过帧起始信号的电平跳变沿来进行硬同步。仲裁段 ID 的优先级也影响着接收设备对报文的反应。因为在 CAN 总线上数据是以广播的形式发送的,所有连接在 CAN 总线的节点都会收到所有其它节点发出的有效数据,因而我们的 CAN。
仲裁段:当同时有两个报文被发送时,总线会根据仲裁段的内容决定哪个数据包能被传输,这也是它名称的由来。
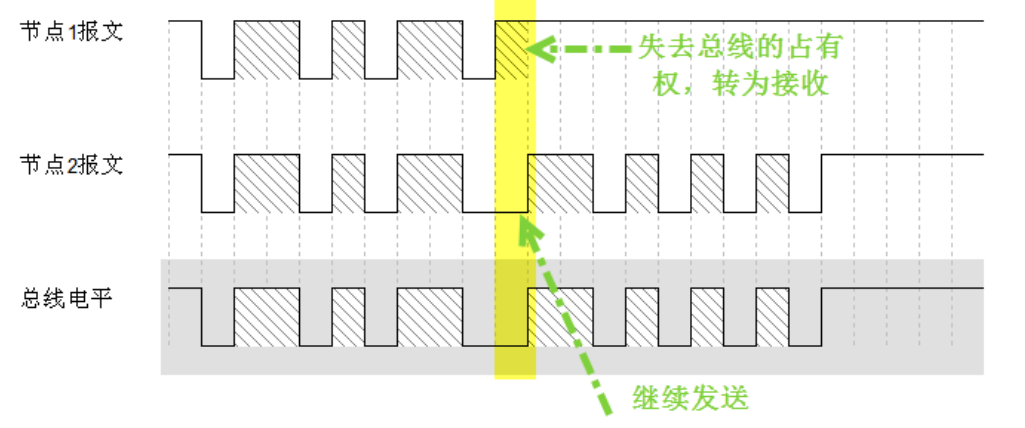
仲裁段的内容主要为本数据帧的ID信息 (标识符),数据帧具有标准格式和扩展格式两种,区别就在于ID 信息的长度,标准格式的 ID 为11位,扩展格式的ID为29 位,它在标准 ID 的基础上多出 18 位。在CAN 协议中,ID 起着重要的作用,它决定着数据帧发送的优先级,也决定着其它节点是否会接收这个数据帧。CAN 协议不对挂载在它之上的节点分配优先级和地址,对总线的占有权是由信息的重要性决定的,即对于重要的信息,我们会给它打包上一个优先级高的ID,使它能够及时地发送出去。也正因为它这样的优先级分配原则,使得 CAN 的扩展性大大加强,在总线上增加或减少节点并不影响其它设备。报文的优先级,是通过对 ID 的仲裁来确定的。根据前面对物理层的分析我们知道如果总线上同时出现显性电平和隐性电平,总线的状态会被置为显性电平,CAN 正是利用这个特性进行仲裁。
若两个节点同时竞争 CAN 总线的占有权,当它们发送报文时,若首先出现隐性电平,则会失去对总线的占有权,进入接收状态。见图,在开始阶段,两个设备发送的电平一样,所以它们一直继续发送数据。到了图中箭头所指的时序处,节点单元 1 发送的为隐性电平,而此时节点单元 2 发送的为显性电平,由于总线的“线与”特性使它表达出显示电平,因此单元 2 竞争总线成功,这个报文得以被继续发送出去。
仲裁段 ID 的优先级也影响着接收设备对报文的反应。因为在 CAN 总线上数据是以广播的形式发送的,所有连接在 CAN 总线的节点都会收到所有其它节点发出的有效数据,因而我们的 CAN。
控制器大多具有根据 ID 过滤报文的功能,它可以控制自己只接收某些 ID 的报文。回看数据帧格式,可看到仲裁段除了报文 ID 外,还有 RTR、IDE 和 SRR 位。
(1) RTR 位 (Remote Transmission Request Bit),译作远程传输请求位,它是用于区分数据帧和遥控帧的,当它为显性电平时表示数据帧,隐性电平时表示遥控帧。
(2) IDE 位 (Identifier ExtensionBit),译作标识符扩展位,它是用于区分标准格式与扩展格式,当它为显性电平时表示标准格式,隐性电平时表示扩展格式。
(3) SRR 位 (Substitute Remote Request Bit),只存在于扩展格式,它用于替代标准格式中的 RTR位。由于扩展帧中的 SRR 位为隐性位,RTR 在数据帧为显性位,所以在两个 ID 相同的标准格式报文与扩展格式报文中,标准格式的优先级较高。
控制段
在控制段中的r1和r0 为保留位,默认设置为显性位。它最主要的是DLC 段(Data Length Code),译为数据长度码,它由4个数据位组成,用于表示本报文中的数据段含有多少个字节,DLC 段表示的数字为0~8。
数据段
数据段为数据帧的核心内容,它是节点要发送的原始信息,由0~8 个字节组成,MSB 先行。
CRC 段
为了保证报文的正确传输,CAN 的报文包含了一段 15 位的 CRC 校验码,一旦接收节点算出的CRC 码跟接收到的 CRC 码不同,则它会向发送节点反馈出错信息,利用错误帧请求它重新发送。CRC 部分的计算一般由 CAN 控制器硬件完成,出错时的处理则由软件控制最大重发数。在CRC 校验码之后,有一个CRC 界定符,它为隐性位,主要作用是把 CRC 校验码与后面的 ACK段间隔起来。
ACK 段
ACK 段包括一个ACK 槽位,和 ACK 界定符位。类似 I2C 总线,在 ACK 槽位中,发送节点发送的是隐性位,而接收节点则在这一位中发送显性位以示应答。在 ACK 槽和帧结束之间由 ACK 界定符间隔开。
帧结束
EOF 段 (End Of Frame),译为帧结束,帧结束段由发送节点发送的7个隐性位表示结束。
由于篇幅原因,其他帧格式不细讲,可自行百度搜索
参考链接:
秀!靠这篇我竟然2天理解了CAN协议!实战STM32F4 CAN!_Wireless_Link的博客-CSDN博客_can协议
四、I2C通信
参考链接:
IIC原理超详细讲解---值得一看_Z小旋的博客-CSDN博客_iic
五、SPI通信
参考链接:
SPI原理超详细讲解---值得一看_Z小旋的博客-CSDN博客_spi
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)