python安装
首先打开python的官网 www.python.org ,进入python官网下载页面,鼠标移入【download】会显示下拉导航栏,根据自己的电脑系统选择相应的版本,如果是windows系统,就选windows,如果是苹果就选mac。

本人电脑是windows系统,所以这里就只介绍windows下python的安装方法;点击windows进入windows版本列表页面,选择一个版本下载。这里我选择的是3.8.6 64位版本。
双击弹出安装界面如下图,记得勾选“Add python 3.8 to path”,这样系统安装的时候就自动配置和环境变量,不需要自己去手动配置了,然后点击安装。
安装完成之后有打开cmd。
在编辑器中输入以下指令:

看到python 3.8.6即可安装成功。
VSCode安装
首先下载vscode安装软件 https://code.visualstudio.com/download,打开网址.
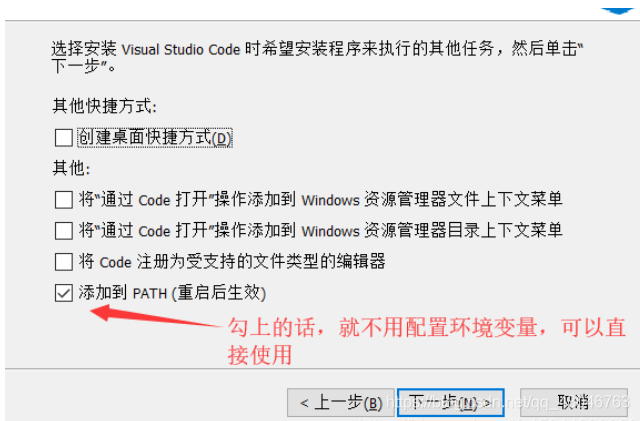
选择自己的系统版本,下载后安装。安装注意安装位置,最好不要安装到系统盘。
安装成功后会在桌面上出现VsCode的图标,进入该软件进行配置。

刚开始进去时是英文的,我的是已经配置好的,所以要先设置一下语言,Ctrl+Shift+P打开搜索框输入Configure Display Language命令。将语言设置为中文,重启软件后就是中文的了。
安装编程语言,在扩展的地方搜索python,点击安装
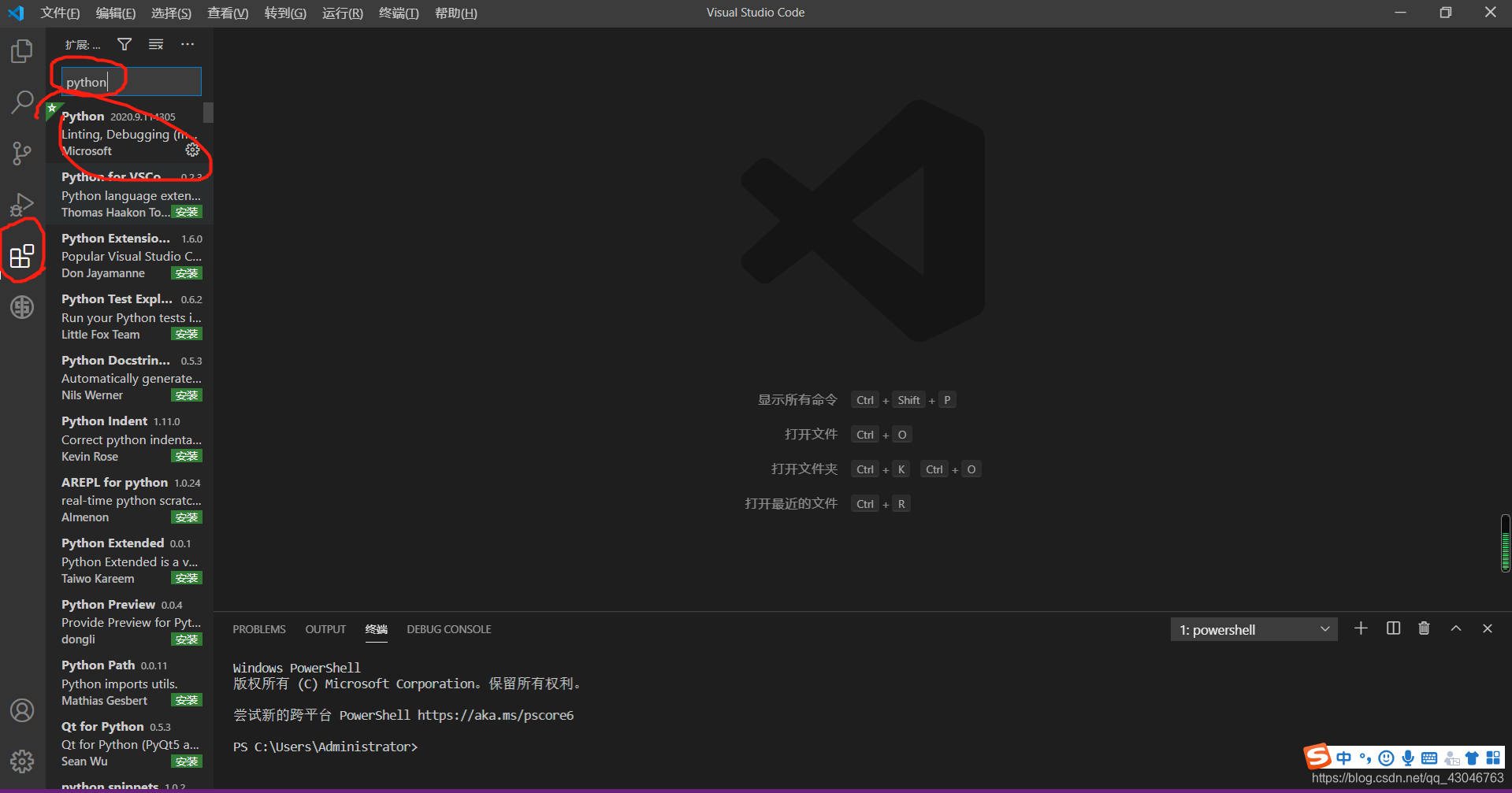
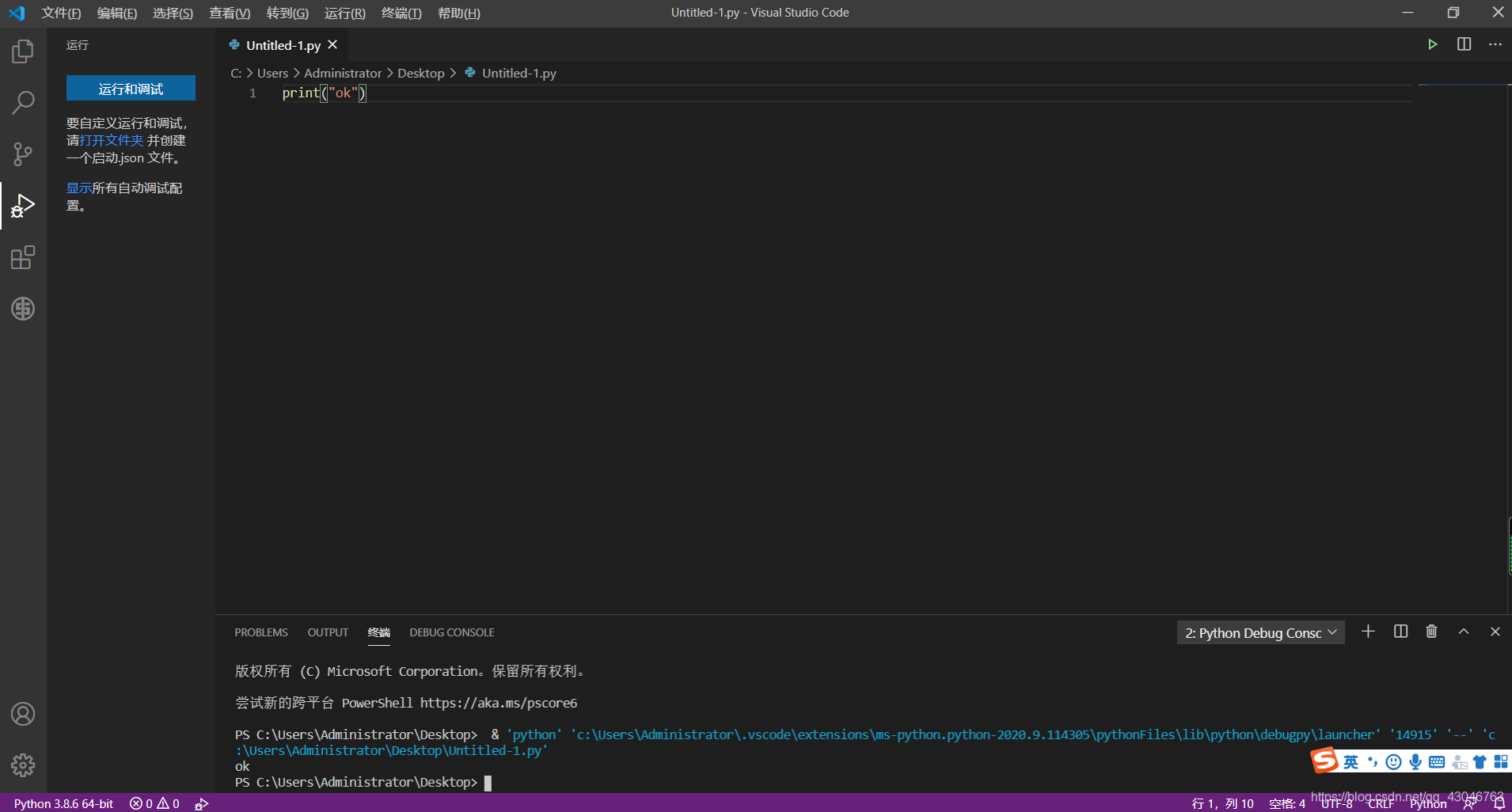
等待安装成功就可以进行python语言的编程了,先新建文件,保存格式为xxx.py,输入一段程序,我们就输出一个ok,就可以在终端看到我们的输出结果。
安装opencv
我们可以在cmd中安装opencv,首先先要安装pip组件,安装地址:https://pypi.python.org/pypi/pip#downloads。
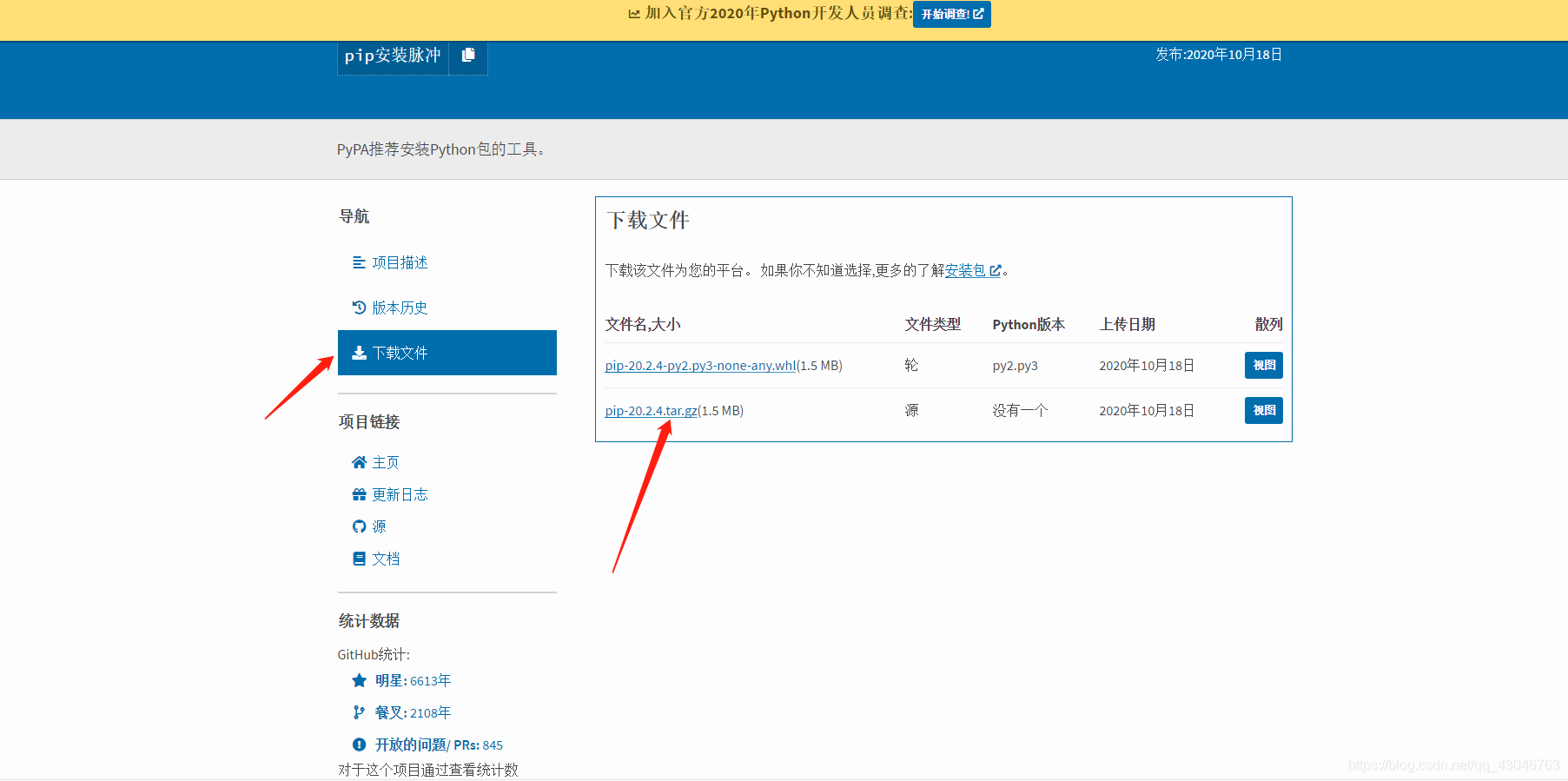
下载完成后进入到下载的地方,找到文件进行安装。

打开cmd,进入到下载setup的路径中,执行python setup.py install命令进行安装。
再次使用cmd,输入pip --version查看一下pip版本,若出现以下情况则证明安装成功。

安装成功后就可以开始安装opencv了。
在cmd中输入pip install opencv-python命令开始安装opencv,安装成功后再输入一遍pip install opencv-python可以查看安装是否成功。
再输入pip install opencv-contrib-python,但是这样安装可能会很慢,所以采用换源的方法,使用清华大学的库,输入pip install -i https://pypi.tuna.tsinghua.edu.cn/simple opencv-python下载就很快了。
下载完成后到cv2的路径中找到

怎么找路径,可以再cmd中输入python -v,再输入import cv2,就可以找到opencv的路径

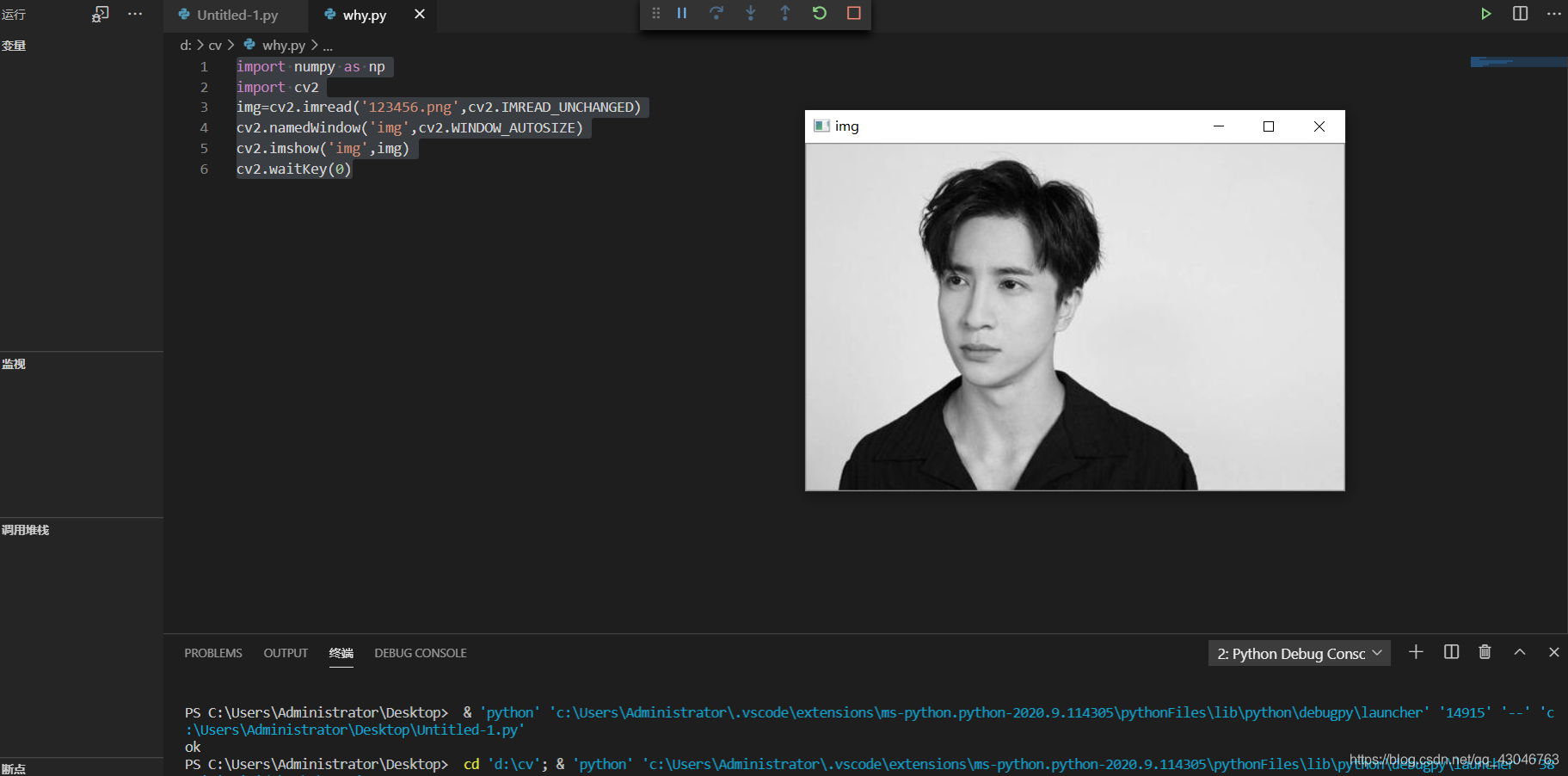
将这个文件复制到以后将要存储opencv工程的一个文件夹中,打开Vscode软件,新建文件,随便起个名字xxx.py,将该文件保存到刚刚新建的那个文件夹中,我们可以从网上保存一张图片,使用简单的代码打开这个图片。
import numpy as np
import cv2
img=cv2.imread('123456.png',cv2.IMREAD_UNCHANGED)
cv2.namedWindow('img',cv2.WINDOW_AUTOSIZE)
cv2.imshow('img',img)
cv2.waitKey(0)
写完代码后按下F5键,选择python File运行代码,最终就会出现图片。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)