这里我用通用定时器3的通道1来测量转速
- 霍尔转速传感器基本介绍
- 霍尔传感器分类和原理
- 关于为什么选用开关型常开PNP型霍尔传感器
- STM32程序实现
- 程序介绍
- 程序源码
- TIM3_CAP.H
- TIM3_CAP.H解读
- TIM3_CAP.C
- TIM3_CAP.C解读
- TIM3中断函数解读
- MAIN.C
- MAIN.C解读
- 结果
- 工程文件
霍尔转速传感器基本介绍
霍尔传感器分类和原理
我用的是开关型常开PNP型的霍尔传感器
开关型的有2种分类,一种是常开,另外一种就是常闭了
关于什么常开常闭,请看下图
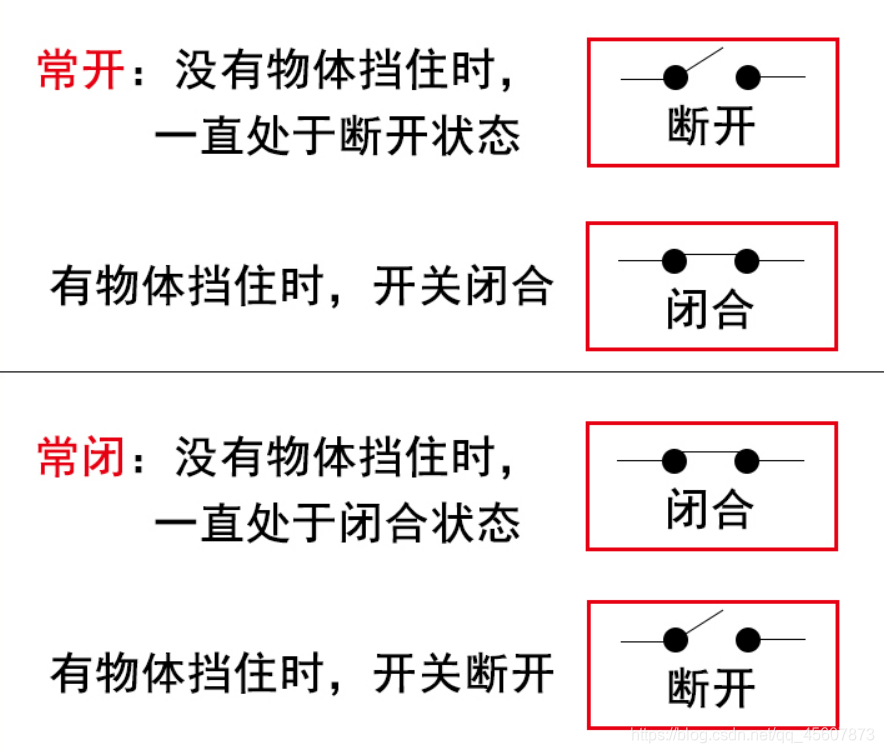
常开通俗来讲,就是霍尔传感器没有检测到磁铁的时候开关就是断开的,常闭相反
霍尔传感器具体分类
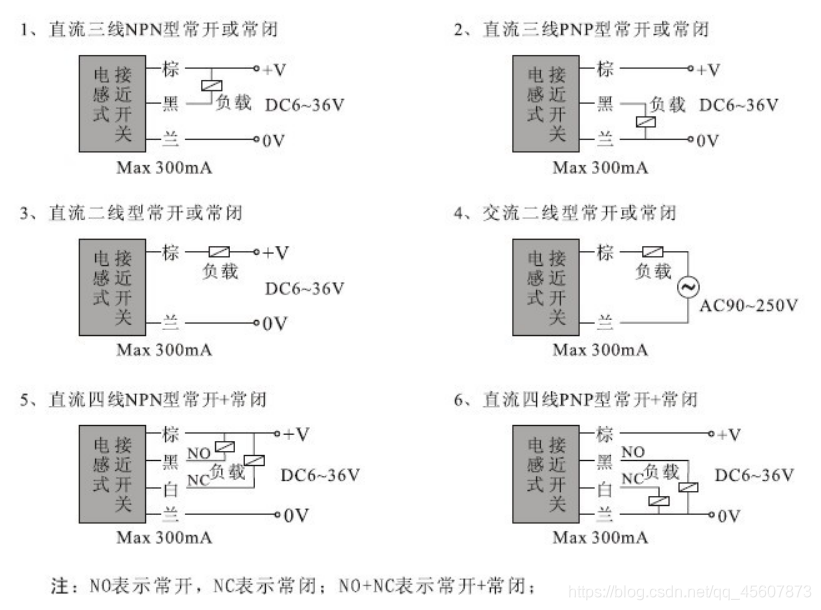
图片来自淘宝链接
说明
关于为什么选用开关型常开PNP型霍尔传感器
单片机只能接收高低电平,0或者是1,
开关型常开的霍尔传感器刚好符合单片机的这个特性
检测到磁铁的时候就输出高电平或者低电平,
PNP型就是检测到磁铁的时候的输出高电平,没有检测到的时候就是低电平
实验中,给霍尔传感器5V供电,检测到磁铁,霍尔传感器就输入5V,没有检测到就是0V了
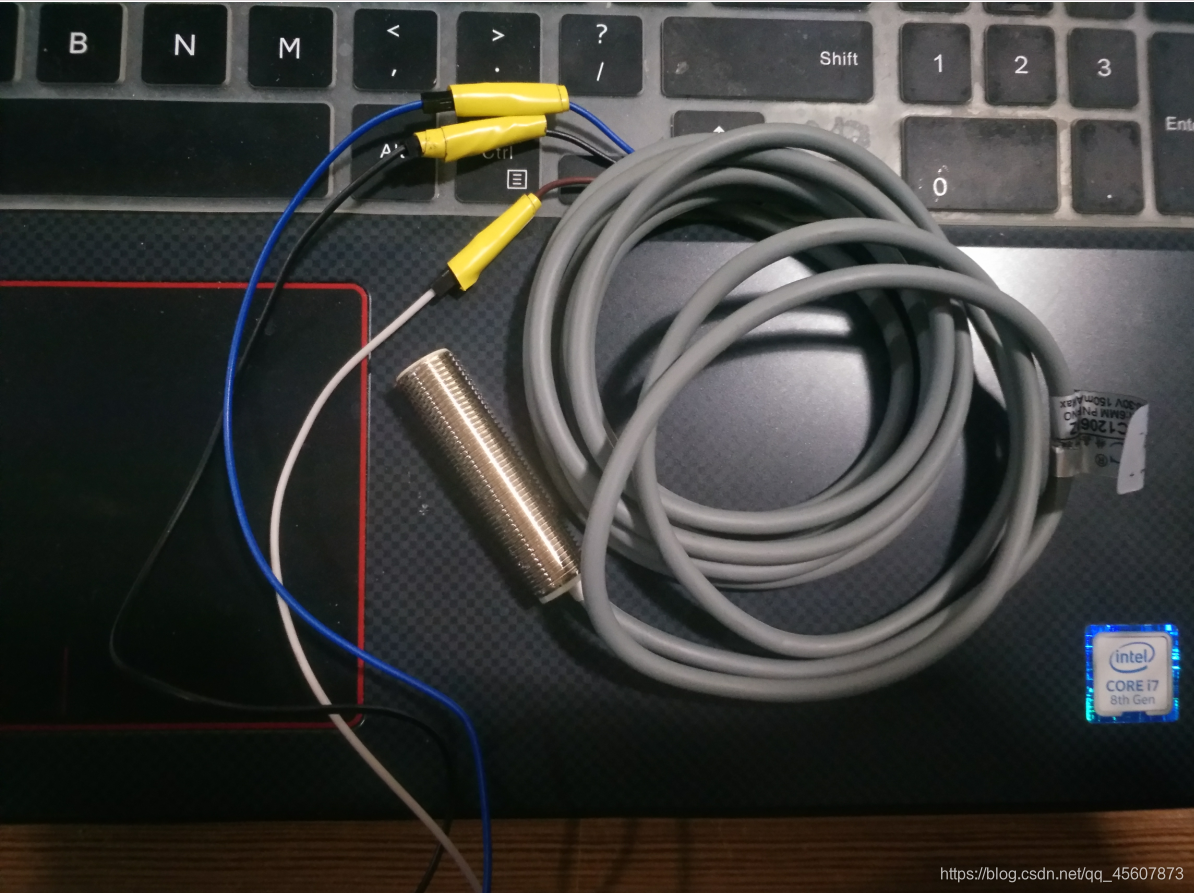
实物图
STM32程序实现
程序介绍
单片机STM32F103ZE
霍尔5V供电,传感器数据输出线接PA6
定时器3 通道1 输入捕获模式
程序源码
TIM3_CAP.H
#ifndef __TIM3_CAP_H
#define __TIM3_CAP_H
#include "sys.h"
extern u32 TIM3_RES;
extern u16 TIM3_CAP;
extern u8 TIM3_FLAG;
void tim3_cap_init(u16 arr,u16 psc);
#endif
TIM3_CAP.H解读
定时器只能在捕获到高电平的时候,把当前计数器的数值保存下次,由于我们需要计算2次高电平的时间,所有需要一个逻辑位TIM3_FLAG
TIM3_CAP用于保存第2次定时器捕获高电平时候的计数器的数值
TIM3_RES是2次高电平总的计数器的数值
TIM3_RES乘以计数器每计一个数的时间就是总的时间了
TIM3_CAP.C
#include "TIM3_CAP.h"
u32 TIM3_RES;
u16 TIM3_CAP;
u8 TIM3_FLAG;
void tim3_cap_init(u16 arr,u16 psc)
{
RCC->APB1ENR|=1<<1;
RCC->APB2ENR|=1<<2;
GPIOA->CRL&=0XF0FFFFFF;
GPIOA->CRL|=0X08080000;
GPIOA->ODR|=0<<6;
TIM3->ARR=arr;
TIM3->PSC=psc;
TIM3->CCMR1|=1<<0;
TIM3->CCMR1|=0<<2;
TIM3->CCMR1|=0<<4;
TIM3->CCER|=1<<0;
TIM3->CCER|=0<<1;
TIM3->DIER|=1<<0;
TIM3->DIER|=1<<1;
MY_NVIC_Init(2,0,TIM3_IRQn,2);
TIM3->CR1|=1<<0;
}
void TIM3_IRQHandler(void)
{
if((TIM3_FLAG&0X80)==0)
{
if(TIM3->SR&0X01)
{
if(TIM3_FLAG&0X40)
{
if((TIM3_FLAG&0X3F)==0X3F)
{
TIM3_FLAG|=0X80;
TIM3_CAP=0XFFFF;
}else TIM3_FLAG++;
}
}
if(TIM3->SR&0x02)
{
if(TIM3_FLAG&0X40)
{
TIM3_FLAG|=0X80;
TIM3_CAP=TIM3->CCR1;
}else
{
TIM3_FLAG=0;
TIM3_CAP=0;
TIM3_FLAG|=0X40;
TIM3->CNT=0;
}
}
}
TIM3->SR=0;
}
TIM3_CAP.C解读
- 首先开启定时器3和GPIOA的时钟
RCC->APB1ENR|=1<<1;
RCC->APB2ENR|=1<<2;
- 接着设置PA6为下拉输入,为什么下拉输入,因为我们需要捕获高电平,如果你要捕获低电平,设置PA6为上拉输入,然后设置定时器下降沿捕获
GPIOA->CRL&=0XF0FFFFFF;
GPIOA->CRL|=0X08080000;
GPIOA->ODR|=0<<6;
- 设置定时器的自动重载值和预分频值
TIM3->ARR=arr;
TIM3->PSC=psc;
- 设置通道1为输入不分频,不滤波
TIM3->CCMR1|=1<<0;
TIM3->CCMR1|=0<<2;
TIM3->CCMR1|=0<<4;
关于什么是分频,什么是滤波
滤波
首先看STM32中文参考手册中的介绍
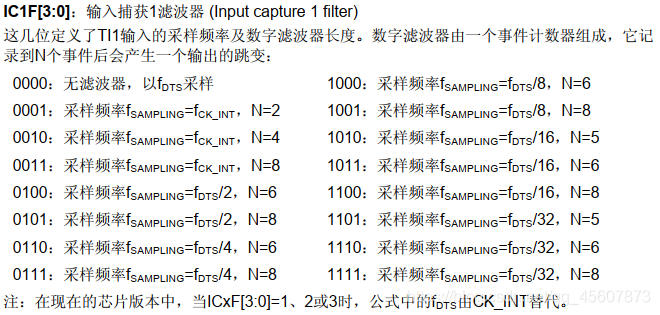
我的理解就是输入捕获采样频率也就是速度
分频
贴上官方介绍
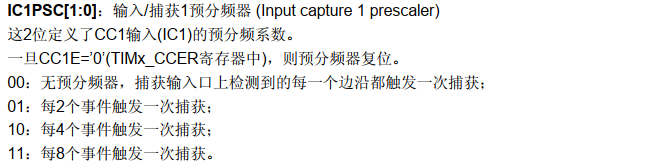
就是每几个高电平触发一次捕获
如果你设置每2个事件触发一次捕获,那么检测到2次高电平的时候才会把当前的计数器的数值保存到TIM3->CCR1寄存器中
什么是TIM3->CCR1寄存器呢
看官方的介绍就知道了
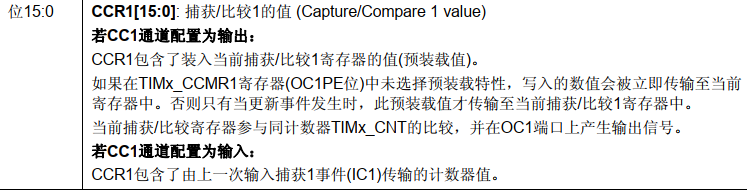
也就是保存捕获的时候计数器的数值
- 计数器的值能捕获入TIM3_CCR1寄存器和设置上升沿捕获
TIM3->CCER|=1<<0;
TIM3->CCER|=0<<1;
- 开启定时器更新中断和通道1捕获中断
TIM3->DIER|=1<<0;
TIM3->DIER|=1<<1;
- 设置中断分组和优先级
MY_NVIC_Init(2,0,TIM3_IRQn,2);
- 开启定时器3
TIM3->CR1|=1<<0;
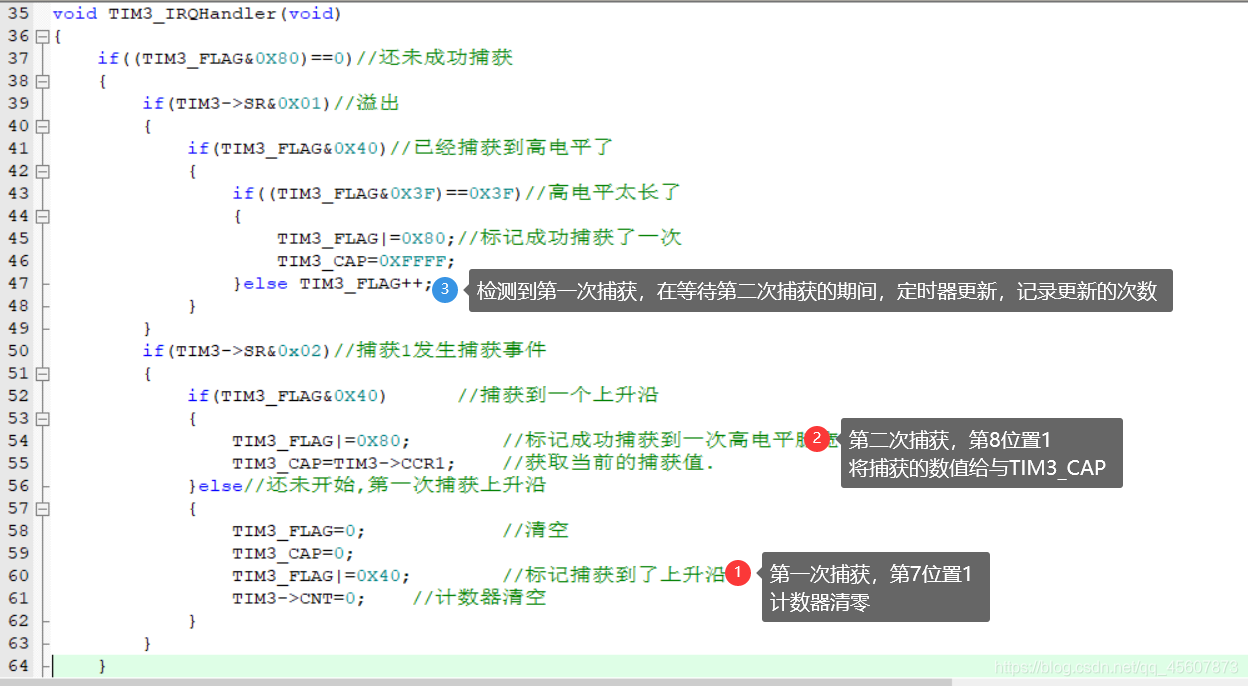
TIM3中断函数解读
TIM3_FLAG是8位的,其中第7位用于标志第一次捕获,如果检测到第一次捕获就置1,第8位用于标志第二次捕获,检测到了就置1,1~6用于在检测到第一次捕获的时候定时器更新的次数
MAIN.C
#include "sys.h"
#include "usart.h"
#include "delay.h"
#include "led.h"
#include "tim3_cap.h"
int main(void)
{
Stm32_Clock_Init(9);
delay_init(72);
uart_init(72,115200);
tim3_cap_init(0XFFFF,72-1);
led_init();
while(1)
{
if(TIM3_FLAG&0X80)
{
TIM3_RES=TIM3_FLAG&0X3F;
TIM3_RES*=65536;
TIM3_RES+=TIM3_CAP;
printf("%.3fs\r\n",0.000001*TIM3_RES);
TIM3_FLAG=0;
}
LED1=!LED1;
delay_ms(200);
}
}
MAIN.C解读
主函数是检测到2次高电平就通过串口打印出高电平的时间
以下头文件中是用了原子哥的头文件
#include "sys.h"
#include "usart.h"
#include "delay.h"
结果
LED1每0.2s切换亮灭状态一次,故每0.4s亮一次,结果和下图一样
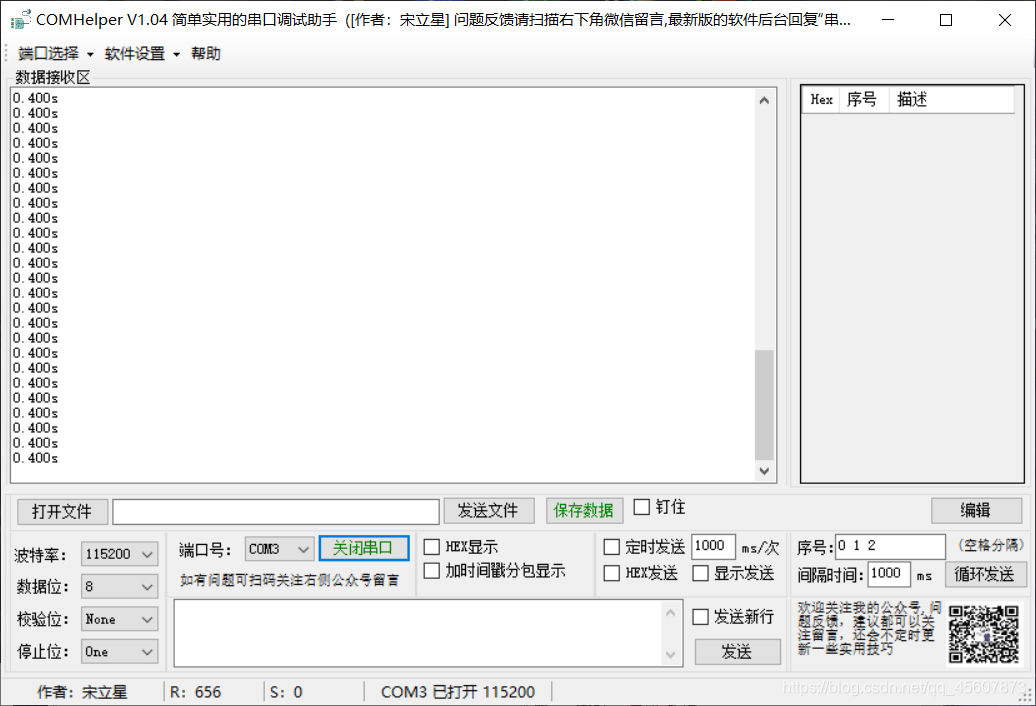
用飞线把PA6(通道1)和PE5(LED1)连接起来

工程文件
工程文件 链接
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)