1.获取车辆的Odometry原始信息
在carla中,通过订阅/carla/ego_vecle/odometry 可以查看车辆的全局位置信息,例如:
> header:
seq: 118872
stamp:
secs: 5946
nsecs: 5720187
frame_id: "map"
child_frame_id: "ego_vehicle"
pose:
pose:
position:
x: 96.5346984863
y: -188.643692017
z: 0.221679911017
orientation:
x: 1.09737910971e-07
y: 5.40849999846e-07
z: 0.0368271997411
w: 0.999321648599
covariance: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
twist:
twist:
linear:
x: -0.00358968405948
y: -3.63046108104e-06
z: 2.80475536936e-07
angular:
x: 2.17012864219e-05
y: -0.000262381265741
z: -0.00483244467764
covariance: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
其中,pose.pose.position.x 和 pose.pose.position.y提供了全局x,y坐标,pose.pose.orientation提供了汽车的旋转角度。
1.1 全局坐标
全局坐标和GNSS传感器获得的经纬度坐标可以相互转换,统一地图内,两种坐标都可以用于车辆定位。
1.2 旋转角度
这里的旋转角度的坐标以N方向为零度,E为90度,W为-90度,S偏E侧为+180度,S偏W侧为-180度,如图所示:
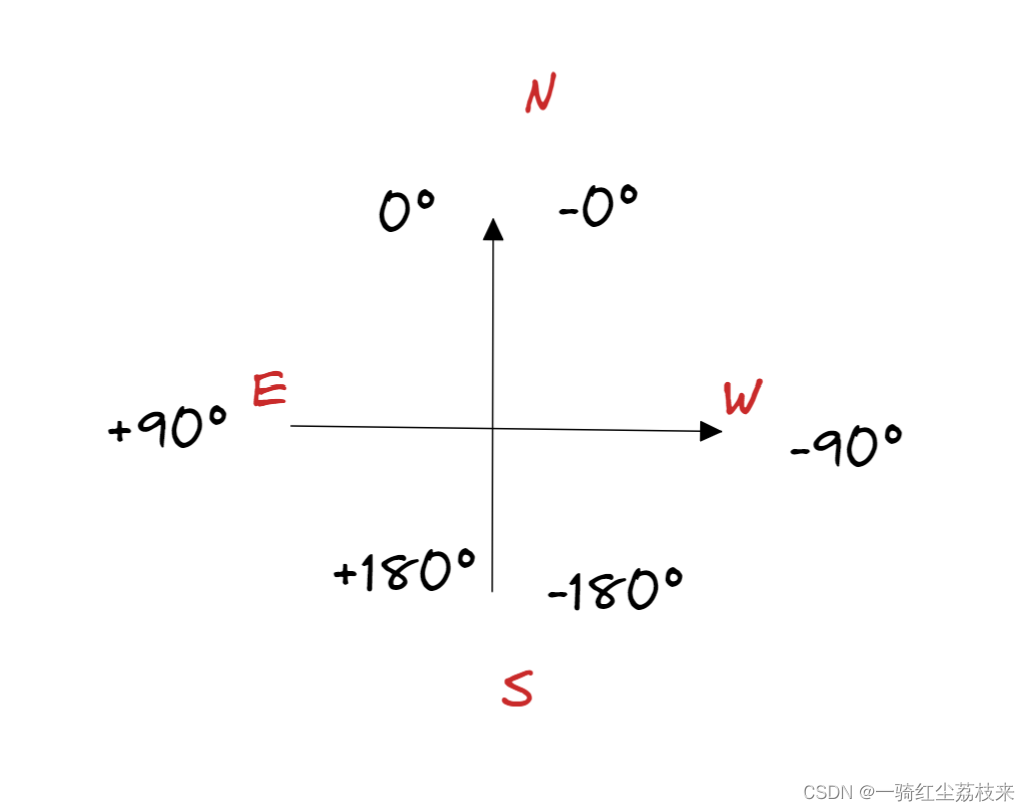
这里值得注意的是:CARLA的odometry坐标系与真实世界的坐标系不同。正常坐标系是上北下南,左西右东,而CARLA里面是上北下南,左东右西。
该角度的具体计算的方法为:
//导入tf/transform_datatypes.h库
#include <tf/transform_datatypes.h>
//使用tf::getYaw获取四元数中的偏航角,然后转换成角度
tf::getYaw(carla_odometry.pose.pose.orientation) * 180.0 / M_PI
计算出来与显示界面的Heading是相同的。

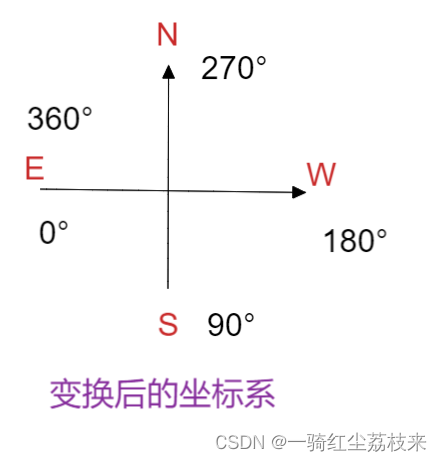
2. 坐标系变换
我们想要把Odometry坐标系变换成下面的角度坐标系:
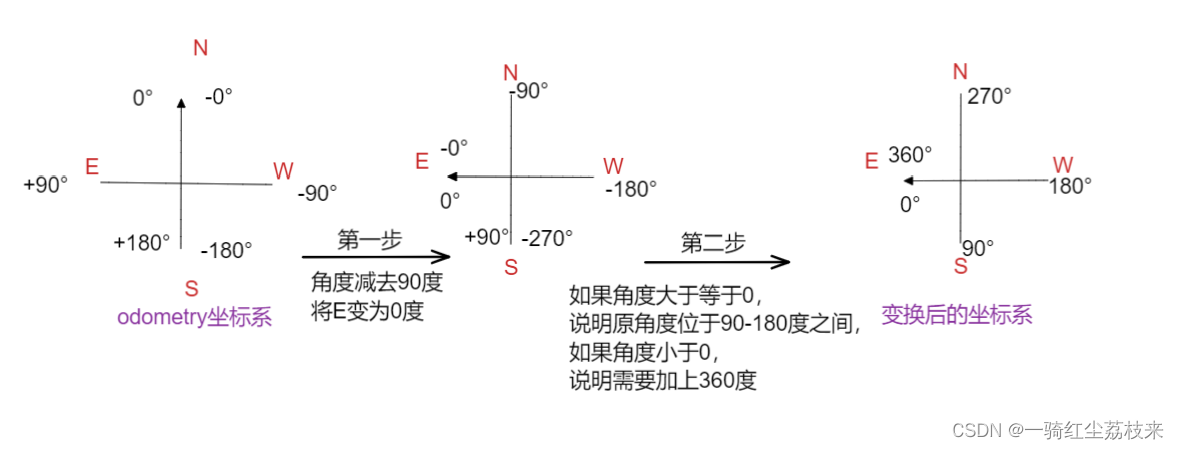
首先,Odometry坐标系需要逆时针旋转90度,那么对应的角度应当减去90度:
θ
1
=
θ
0
−
90
°
\theta_1=\theta_0 - 90°
θ1=θ0−90°
然后,取值范围需要变换到0-360度,对于原角度位于[90°,180°]的,减去90°后已经是变换后的角度,对于[0,90°],[-0,-180°]角度,减去90°后会变成负数,需要增加360°变成正数。
θ
2
=
{
θ
1
,
θ
1
>
=
0
θ
1
+
2
π
,
θ
1
<
0
\theta_2 = \left\{\begin{matrix} \theta_1, \theta_1 >= 0\\ \theta_1 + 2\pi , \theta_1 <0 \\ \end{matrix}\right.
θ2={θ1,θ1>=0θ1+2π,θ1<0
变换过程如图所示:
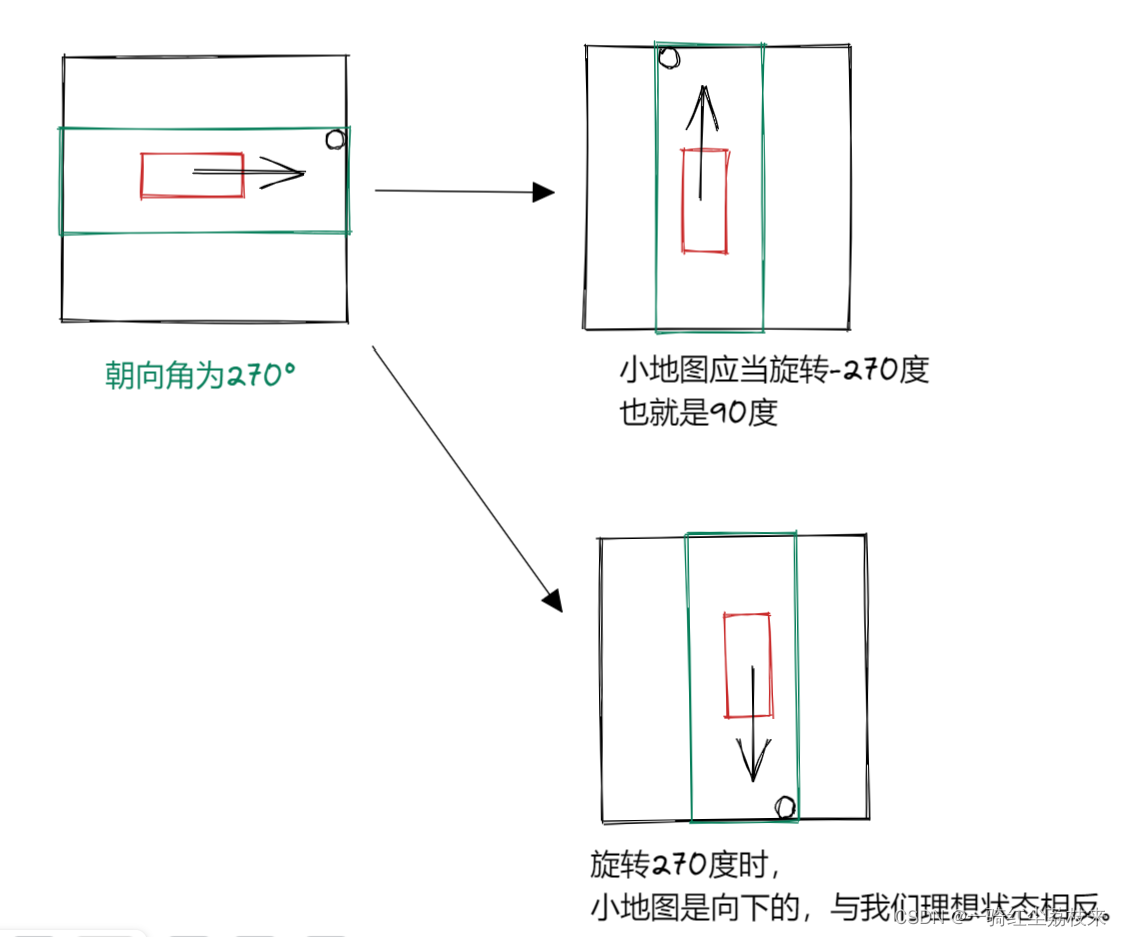
3.关于小地图截取时的注意事项
carla的地图有时候 并不是 上北下南 左西右东的,例如Town02地图
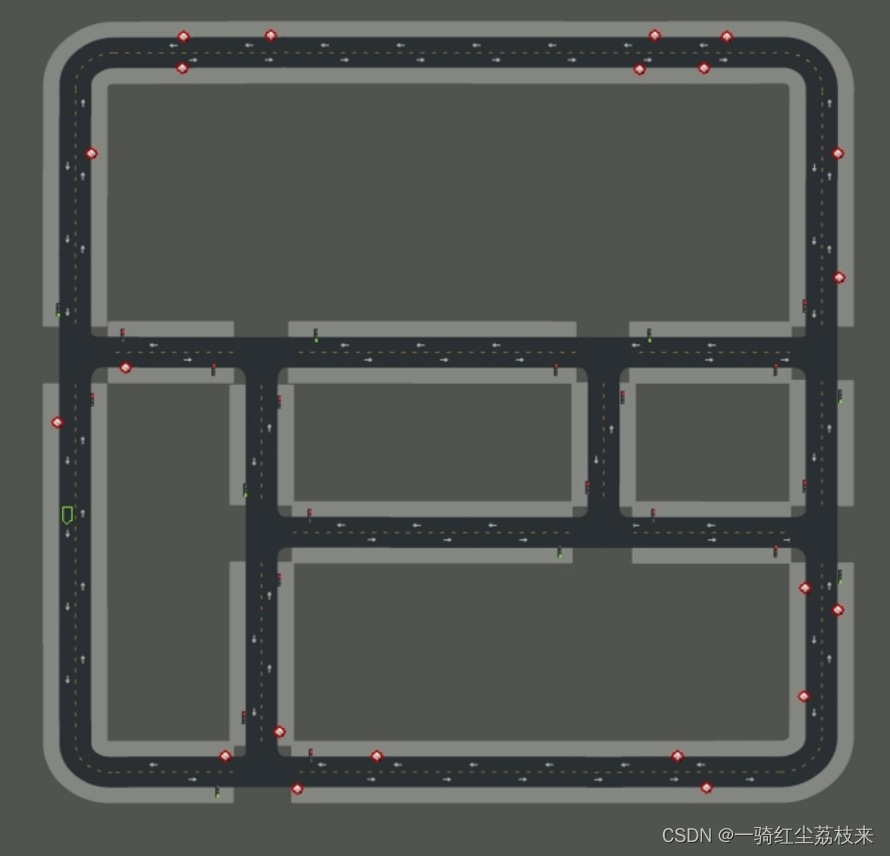
实际上,图片的上方是东,下发是西,左边是南,右边是北。我们想要使得截取的小地图始终朝向车头方向,就要将图片往反方向旋转相同的角度。