1. 算法原理
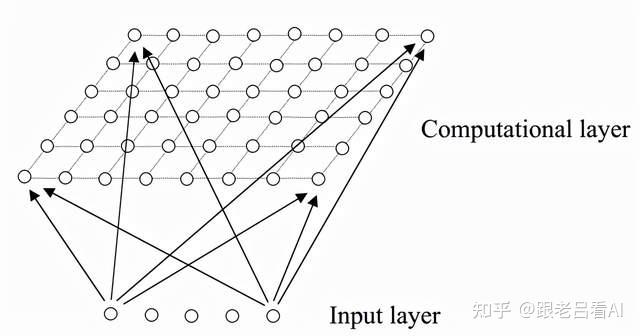
自组织映射(Self-organizing map, SOM)通过学习输入空间中的数据,生成一个低维、离散的映射(Map),从某种程度上也可看成一种降维算法。
SOM是一种无监督的人工神经网络。不同于一般神经网络基于损失函数的反向传递来训练,它运用竞争学习(competitive learning)策略,依靠神经元之间互相竞争逐步优化网络。使用近邻关系函数(neighborhood function)来维持输入空间的拓扑结构。
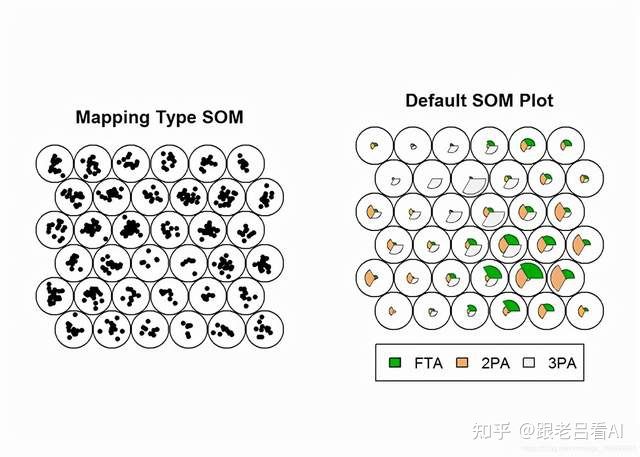
维持输入空间的拓扑结构:意味着什么 二维映射包含了数据点之间的相对距离。输入空间中相邻的样本会被映射到相邻的输出神经元。
由于基于无监督学习,这意味着训练阶段不需要人工介入(即不需要样本标签),我们可以在不知道类别的情况下,对数据进行聚类;可以识别出针对某问题具有内在关联的特征。
特点归纳:
- 神经网络,竞争学习策略
- 无监督学习,不需要额外标签
- 非常适合高维数据的可视化,能够维持输入空间的拓扑结构
- 具有很高的泛化能力,它甚至能识别之前从没遇过的输入样本
2. MiniSom库
2.1. 安装
pip install minisom
2.2. 使用
from minisom import MiniSom
data = [[ 0.80 , 0.55 , 0.22 , 0.03 ],
[ 0.82 , 0.50 , 0.23 , 0.03 ],
[ 0.80 , 0.54 , 0.22 , 0.03 ],
[ 0.80 , 0.53 , 0.26 , 0.03 ],
[ 0.79 , 0.56 , 0.22 , 0.03 ],
[ 0.75 , 0.60 , 0.25 , 0.03 ],
[ 0.77 , 0.59 , 0.22 , 0.03 ]]
som = MiniSom(6, 6, 4, sigma=0.3, learning_rate=0.5) # initialization of 6x6 SOM
som.train(data, 100) # trains the SOM with 100 iterations
参考文献
自组织映射(Self-organizing map, SOM) - 知乎
自组织映射(SOM)聚类分析Python第三方库实现<minisom>_府学路18号车神的博客-CSDN博客
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)