大多深度学习框架主要支持python,而caffe提供c++接口,这也是我选择caffe框架的原因。
前一章说到examples/ssd目录下的ssd_detect.cpp文件是weiliu等大神给我们提供的,算是一个c++实现demo,这一章主要分析ssd_detect.cpp代码,以及在qt上进行编译调试。
1、Qt环境搭建
(1)ubuntu安装QT
一条命令暴力安装:
sudo apt-get install cmake qt5-default qtcreator
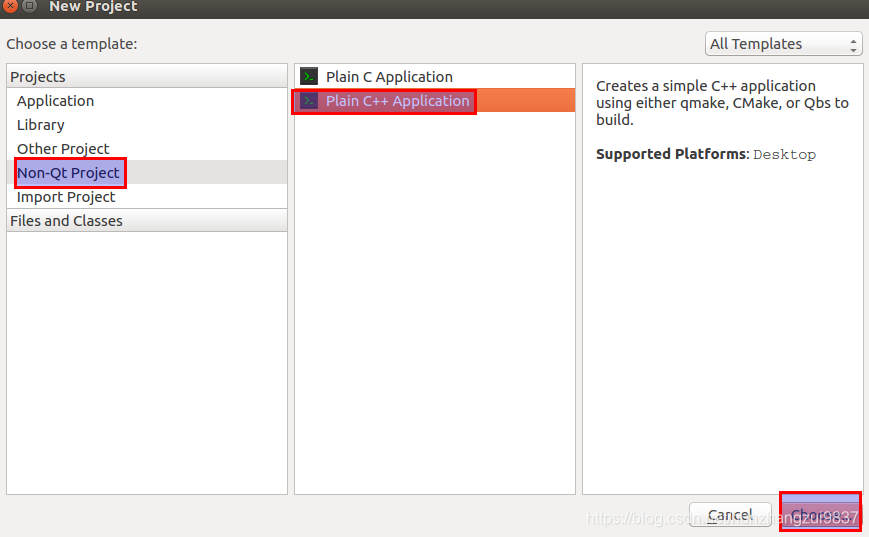
(2)新建一个c++工程
在.pro文件进行编译配置:
TEMPLATE = app
CONFIG += console c++11
CONFIG -= app_bundle
CONFIG -= qt
SOURCES += main.cpp
#system
INCLUDEPATH += /usr/local/lib \
/usr/lib/x86_64-linux-gnu
LIBS += -L/usr/local/lib
#opencv
INCLUDEPATH += /usr/include \
/usr/include/opencv \
/usr/include/opencv2/
LIBS += -L /usr/lib/libopencv_*.so
#LIBS += -L /usr/lib -lopencv_core -lopencv_imgcodecs -lopencv_highgui
#caffe
INCLUDEPATH += /home/bjw/caffe/include \
/home/bjw/caffe/build/src \
LIBS += -L/home/bjw/caffe/build/lib/lib_*.so
LIBS += -L/home/bjw/caffe/build/lib -lcaffe
#cuda cudnn
INCLUDEPATH += /usr/local/cuda/include
LIBS += -L/usr/local/cuda/lib64
LIBS += -lcudart -lcublas -lcurand
#caffe addition
LIBS += -lglog -lgflags -lprotobuf -lboost_system -lboost_thread -llmdb -lleveldb -lstdc++ -lcblas -latlas -lcudnn
《注意》:需要根据自己的路径进行调整。
2、编译运行ssd_detect.cpp
把官方给的ssd_detect.cpp粘贴复制到自己的工程就可以了,下面是我根据官方给的代码进行了微调,可以测试image,video和摄像头。
// This is a demo code for using a SSD model to do detection.
// The code is modified from examples/cpp_classification/classification.cpp.
// Usage:
// ssd_detect [FLAGS] model_file weights_file list_file
//
// where model_file is the .prototxt file defining the network architecture, and
// weights_file is the .caffemodel file containing the network parameters, and
// list_file contains a list of image files with the format as follows:
// folder/img1.JPEG
// folder/img2.JPEG
// list_file can also contain a list of video files with the format as follows:
// folder/video1.mp4
// folder/video2.mp4
//
#define USE_OPENCV
#include <caffe/caffe.hpp>
#ifdef USE_OPENCV
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#endif // USE_OPENCV
#include <algorithm>
#include <iomanip>
#include <iosfwd>
#include <memory>
#include <string>
#include <utility>
#include <vector>
#ifdef USE_OPENCV
using namespace caffe; // NOLINT(build/namespaces)
using namespace cv;
using namespace std;
class Detector {
public:
Detector(const string& model_file,
const string& weights_file,
const string& mean_file,
const string& mean_value);
std::vector<vector<float> > Detect(const cv::Mat& img);
private:
void SetMean(const string& mean_file, const string& mean_value);
void WrapInputLayer(std::vector<cv::Mat>* input_channels);
void Preprocess(const cv::Mat& img,
std::vector<cv::Mat>* input_channels);
private:
boost::shared_ptr<Net<float> > net_;
cv::Size input_geometry_;
int num_channels_;
cv::Mat mean_;
};
Detector::Detector(const string& model_file,
const string& weights_file,
const string& mean_file,
const string& mean_value) {
#ifdef CPU_ONLY
Caffe::set_mode(Caffe::CPU);
#else
Caffe::set_mode(Caffe::GPU);
#endif
/* Load the network. */
net_.reset(new Net<float>(model_file, TEST));
net_->CopyTrainedLayersFrom(weights_file);
CHECK_EQ(net_->num_inputs(), 1) << "Network should have exactly one input.";
CHECK_EQ(net_->num_outputs(), 1) << "Network should have exactly one output.";
Blob<float>* input_layer = net_->input_blobs()[0];
num_channels_ = input_layer->channels();
CHECK(num_channels_ == 3 || num_channels_ == 1)
<< "Input layer should have 1 or 3 channels.";
input_geometry_ = cv::Size(input_layer->width(), input_layer->height());
/* Load the binaryproto mean file. */
SetMean(mean_file, mean_value);
}
std::vector<vector<float> > Detector::Detect(const cv::Mat& img) {
Blob<float>* input_layer = net_->input_blobs()[0];
input_layer->Reshape(1, num_channels_,
input_geometry_.height, input_geometry_.width);
/* Forward dimension change to all layers. */
net_->Reshape();
std::vector<cv::Mat> input_channels;
WrapInputLayer(&input_channels);
Preprocess(img, &input_channels);
net_->Forward();
/* Copy the output layer to a std::vector */
Blob<float>* result_blob = net_->output_blobs()[0];
const float* result = result_blob->cpu_data();
const int num_det = result_blob->height();
vector<vector<float> > detections;
for (int k = 0; k < num_det; ++k) {
if (result[0] == -1) {
// Skip invalid detection.
result += 7;
continue;
}
vector<float> detection(result, result + 7);
detections.push_back(detection);
result += 7;
}
return detections;
}
/* Load the mean file in binaryproto format. */
void Detector::SetMean(const string& mean_file, const string& mean_value) {
cv::Scalar channel_mean;
if (!mean_file.empty()) {
CHECK(mean_value.empty()) <<
"Cannot specify mean_file and mean_value at the same time";
BlobProto blob_proto;
ReadProtoFromBinaryFileOrDie(mean_file.c_str(), &blob_proto);
/* Convert from BlobProto to Blob<float> */
Blob<float> mean_blob;
mean_blob.FromProto(blob_proto);
CHECK_EQ(mean_blob.channels(), num_channels_)
<< "Number of channels of mean file doesn't match input layer.";
/* The format of the mean file is planar 32-bit float BGR or grayscale. */
std::vector<cv::Mat> channels;
float* data = mean_blob.mutable_cpu_data();
for (int i = 0; i < num_channels_; ++i) {
/* Extract an individual channel. */
cv::Mat channel(mean_blob.height(), mean_blob.width(), CV_32FC1, data);
channels.push_back(channel);
data += mean_blob.height() * mean_blob.width();
}
/* Merge the separate channels into a single image. */
cv::Mat mean;
cv::merge(channels, mean);
/* Compute the global mean pixel value and create a mean image
* filled with this value. */
channel_mean = cv::mean(mean);
mean_ = cv::Mat(input_geometry_, mean.type(), channel_mean);
}
if (!mean_value.empty()) {
CHECK(mean_file.empty()) <<
"Cannot specify mean_file and mean_value at the same time";
stringstream ss(mean_value);
vector<float> values;
string item;
while (getline(ss, item, ',')) {
float value = std::atof(item.c_str());
values.push_back(value);
}
CHECK(values.size() == 1 || values.size() == num_channels_) <<
"Specify either 1 mean_value or as many as channels: " << num_channels_;
std::vector<cv::Mat> channels;
for (int i = 0; i < num_channels_; ++i) {
/* Extract an individual channel. */
cv::Mat channel(input_geometry_.height, input_geometry_.width, CV_32FC1,
cv::Scalar(values[i]));
channels.push_back(channel);
}
cv::merge(channels, mean_);
}
}
/* Wrap the input layer of the network in separate cv::Mat objects
* (one per channel). This way we save one memcpy operation and we
* don't need to rely on cudaMemcpy2D. The last preprocessing
* operation will write the separate channels directly to the input
* layer. */
void Detector::WrapInputLayer(std::vector<cv::Mat>* input_channels) {
Blob<float>* input_layer = net_->input_blobs()[0];
int width = input_layer->width();
int height = input_layer->height();
float* input_data = input_layer->mutable_cpu_data();
for (int i = 0; i < input_layer->channels(); ++i) {
cv::Mat channel(height, width, CV_32FC1, input_data);
input_channels->push_back(channel);
input_data += width * height;
}
}
void Detector::Preprocess(const cv::Mat& img,
std::vector<cv::Mat>* input_channels) {
/* Convert the input image to the input image format of the network. */
cv::Mat sample;
if (img.channels() == 3 && num_channels_ == 1)
cv::cvtColor(img, sample, cv::COLOR_BGR2GRAY);
else if (img.channels() == 4 && num_channels_ == 1)
cv::cvtColor(img, sample, cv::COLOR_BGRA2GRAY);
else if (img.channels() == 4 && num_channels_ == 3)
cv::cvtColor(img, sample, cv::COLOR_BGRA2BGR);
else if (img.channels() == 1 && num_channels_ == 3)
cv::cvtColor(img, sample, cv::COLOR_GRAY2BGR);
else
sample = img;
cv::Mat sample_resized;
if (sample.size() != input_geometry_)
cv::resize(sample, sample_resized, input_geometry_);
else
sample_resized = sample;
cv::Mat sample_float;
if (num_channels_ == 3)
sample_resized.convertTo(sample_float, CV_32FC3);
else
sample_resized.convertTo(sample_float, CV_32FC1);
cv::Mat sample_normalized;
cv::subtract(sample_float, mean_, sample_normalized);
/* This operation will write the separate BGR planes directly to the
* input layer of the network because it is wrapped by the cv::Mat
* objects in input_channels. */
cv::split(sample_normalized, *input_channels);
CHECK(reinterpret_cast<float*>(input_channels->at(0).data)
== net_->input_blobs()[0]->cpu_data())
<< "Input channels are not wrapping the input layer of the network.";
}
DEFINE_string(mean_file, "",
"The mean file used to subtract from the input image.");
DEFINE_string(mean_value, "104,117,123",
"If specified, can be one value or can be same as image channels"
" - would subtract from the corresponding channel). Separated by ','."
"Either mean_file or mean_value should be provided, not both.");
DEFINE_string(file_type, "image",
"The file type in the list_file. Currently support image and video.");
DEFINE_string(out_file, "/home/bjw/caffe/output.txt",
"If provided, store the detection results in the out_file.");
DEFINE_double(confidence_threshold, 0.3,
"Only store detections with score higher than the threshold.");
vector<string> labels = {"background",
"aeroplane", "bicycle","bird", "boat", "bottle",
"bus", "car", "cat","chair","cow",
"diningtable","dog","horse","motorbike","person",
"pottedplant","sheep","sofa","train","tvmonitor"};
int main(int argc, char** argv) {
const string& model_file = "/home/bjw/caffe/models/VGGNet/VOC0712/SSD_300x300/deploy.prototxt";
const string& weights_file = "/home/bjw/caffe/models/VGGNet/VOC0712/SSD_300x300/VGG_VOC0712_SSD_300x300_iter_120000.caffemodel";
const string& mean_file = FLAGS_mean_file;
const string& mean_value = FLAGS_mean_value;
const string& file_type = FLAGS_file_type;
const string& out_file = FLAGS_out_file;
const float confidence_threshold = FLAGS_confidence_threshold;
// Initialize the network.
Detector detector(model_file, weights_file, mean_file, mean_value);
// Set the output mode.
std::streambuf* buf = std::cout.rdbuf();
std::ofstream outfile;
if (!out_file.empty()) {
outfile.open(out_file.c_str());
if (outfile.good()) {
buf = outfile.rdbuf();
}
}
std::ostream out(buf);
// Process image one by one.
std::ifstream infile("/home/bjw/caffe/examples/images/list.txt");
std::string file;
while (infile >> file)
{
if (file_type == "image")
{
cv::Mat img = cv::imread(file, -1);
CHECK(!img.empty()) << "Unable to decode image " << file;
std::vector<vector<float> > detections = detector.Detect(img);
/* Print the detection results. */
for (int i = 0; i < detections.size(); ++i) {
const vector<float>& d = detections[i];
// Detection format: [image_id, label, score, xmin, ymin, xmax, ymax].
CHECK_EQ(d.size(), 7);
const float score = d[2];
if (score >= confidence_threshold) {
//save to file
out << file << " ";
out << static_cast<int>(d[1]) << " ";
out << score << " ";
out << static_cast<int>(d[3] * img.cols) << " ";
out << static_cast<int>(d[4] * img.rows) << " ";
out << static_cast<int>(d[5] * img.cols) << " ";
out << static_cast<int>(d[6] * img.rows) << std::endl;
//plot
int x = static_cast<int>(d[3] * img.cols);
int y = static_cast<int>(d[4] * img.rows);
int width = static_cast<int>(d[5] * img.cols) - x;
int height = static_cast<int>(d[6] * img.rows) - y;
Rect rect(max(x,0), max(y,0), width, height);
rectangle(img, rect, Scalar(0,255,0));
string sco = to_string(score).substr(0, 5);
putText(img, labels[static_cast<int>(d[1])] + ":" + sco, Point(max(x, 0), max(y + height / 2, 0)),
FONT_HERSHEY_SIMPLEX, 1, Scalar(0,255,0));
}
}
imshow("image_show",img);
//按任意键切换图片
waitKey(0);
} else if (file_type == "video") {
cv::VideoCapture cap(file);
if (!cap.isOpened()) {
LOG(FATAL) << "Failed to open video: " << file;
}
cv::Mat img;
int frame_count = 0;
while (true) {
bool success = cap.read(img);
if (!success) {
LOG(INFO) << "Process " << frame_count << " frames from " << file;
break;
}
CHECK(!img.empty()) << "Error when read frame";
std::vector<vector<float> > detections = detector.Detect(img);
/* Print the detection results. */
for (int i = 0; i < detections.size(); ++i) {
const vector<float>& d = detections[i];
// Detection format: [image_id, label, score, xmin, ymin, xmax, ymax].
CHECK_EQ(d.size(), 7);
const float score = d[2];
if (score >= confidence_threshold) {
//save to file
out << file << "_";
out << std::setfill('0') << std::setw(6) << frame_count << " ";
out << static_cast<int>(d[1]) << " ";
out << score << " ";
out << static_cast<int>(d[3] * img.cols) << " ";
out << static_cast<int>(d[4] * img.rows) << " ";
out << static_cast<int>(d[5] * img.cols) << " ";
out << static_cast<int>(d[6] * img.rows) << std::endl;
//plot
int x = static_cast<int>(d[3] * img.cols);
int y = static_cast<int>(d[4] * img.rows);
int width = static_cast<int>(d[5] * img.cols) - x;
int height = static_cast<int>(d[6] * img.rows) - y;
Rect rect(max(x,0), max(y,0), width, height);
rectangle(img, rect, Scalar(0,255,0));
//string sco = to_string(score).substr(0, 5);
//putText(img, labels[static_cast<int>(d[1])] + ":" + sco, Point(max(x, 0), max(y + height / 2, 0)),
// FONT_HERSHEY_SIMPLEX, 1, Scalar(0,255,0));
}
}
imshow("video_show",img);
waitKey(30);
++frame_count;
}
if (cap.isOpened()) {
cap.release();
}
}else if (file_type == "camera"){
cv::VideoCapture capture;
capture.open(0);
while(capture.isOpened()){
//frame存储每一帧图像
Mat img;
//读取当前帧
capture >> img;
std::vector<vector<float> > detections = detector.Detect(img);
for (int i = 0; i < detections.size(); ++i) {
const vector<float>& d = detections[i];
// Detection format: [image_id, label, score, xmin, ymin, xmax, ymax].
CHECK_EQ(d.size(), 7);
const float score = d[2];
if (score >= confidence_threshold) {
//plot
int x = static_cast<int>(d[3] * img.cols);
int y = static_cast<int>(d[4] * img.rows);
int width = static_cast<int>(d[5] * img.cols) - x;
int height = static_cast<int>(d[6] * img.rows) - y;
Rect rect(max(x,0), max(y,0), width, height);
rectangle(img, rect, Scalar(0,255,0));
//string sco = to_string(score).substr(0, 5);
//putText(img, labels[static_cast<int>(d[1])] + ":" + sco, Point(max(x, 0), max(y + height / 2, 0)),
// FONT_HERSHEY_SIMPLEX, 1, Scalar(0,255,0));
}
}
//显示当前视频
imshow("camera", img);
//延时30ms,按下任何键退出
if (waitKey(30) >= 0)
break;
}
}else {
LOG(FATAL) << "Unknown file_type: " << file_type;
}
}
return 0;
}
#else
int main(int argc, char** argv) {
LOG(FATAL) << "This example requires OpenCV; compile with USE_OPENCV.";
}
#endif // USE_OPENCV
注意需要修改的几个点:
(1)模型描述文件和caffemodel文件
源代码是通过传参的方式,我把它写死了,如图:

(2)mean_file、mean_value默认,file_type(检测类型)、out_file(输出路径)和confidence_threshold(阈值)需要修改
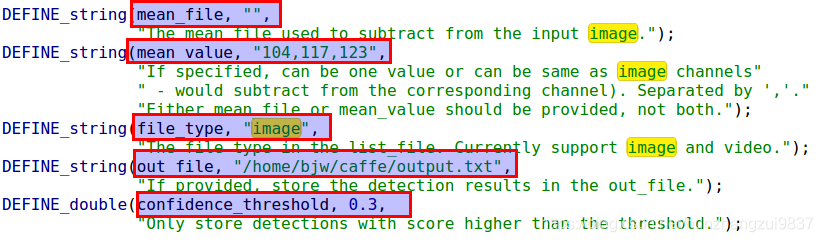
《注》 本代码file_type可选image、video和camera
(3) 测试图片或者video的路径
同样,源代码是通过传参的方式,我把它写死了,如图:

《注》:list.txt里面是图片或者video的绝对路径,camera测试不需要。
3、运行测试
(1)图片测试
在代码中,file_type选择image。测试图片路径:CAFFE_ROOT/examples/images/list.txt
list.txt内容:
CAFFE_ROOT/examples/images/cat.jpg
CAFFE_ROOT/examples/images/fish-bike.jpg

按任意键,切换检测图片:

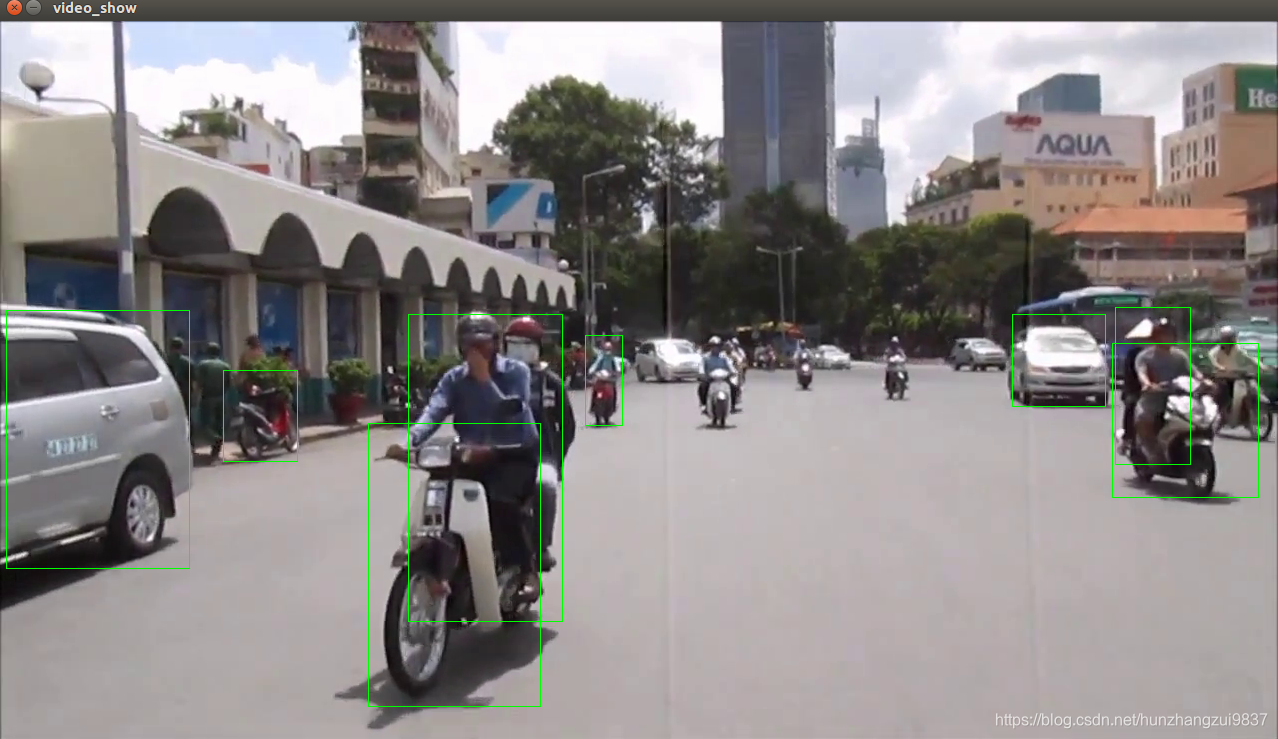
(2)video测试
在代码中,file_type选择video。测试图片路径:CAFFE_ROOT/examples/videos/list.txt
list.txt内容:
CAFFE_ROOT/examples/videos/ILSVRC2015_train_00755001.mp4
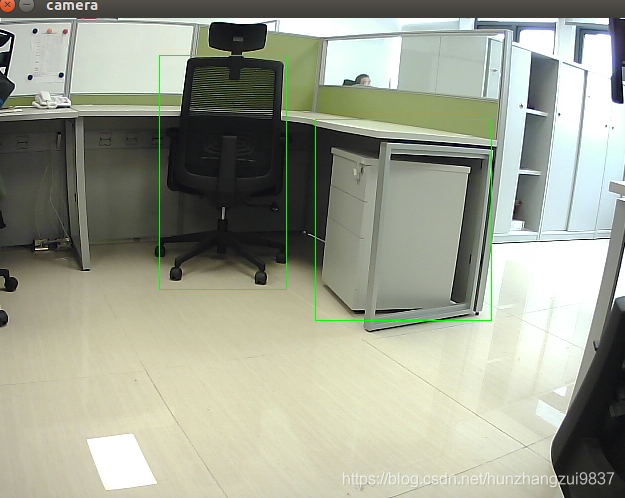
(2)camera测试
在代码中,file_type选择camera。