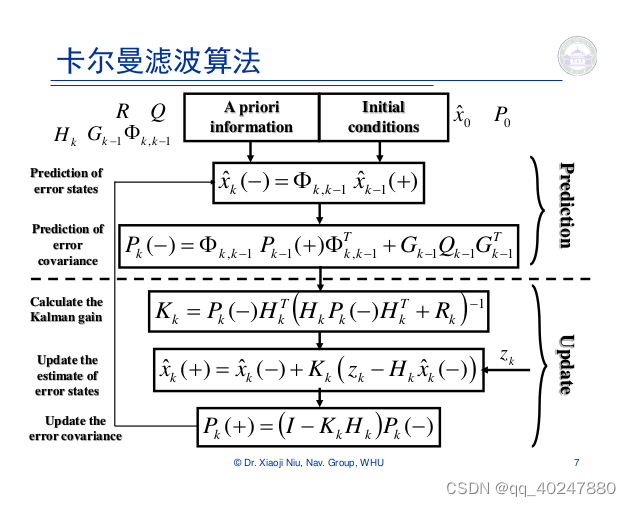
第四公式中kk是权重,(zk-hx)为innovation新息,即真实的观测-估计的观测,前者包含观测误差(gps的电离层,多径),后者包含估计误差。kk近似1,则无限相信新观测,kk-》0,相信估计。