地震应用方向
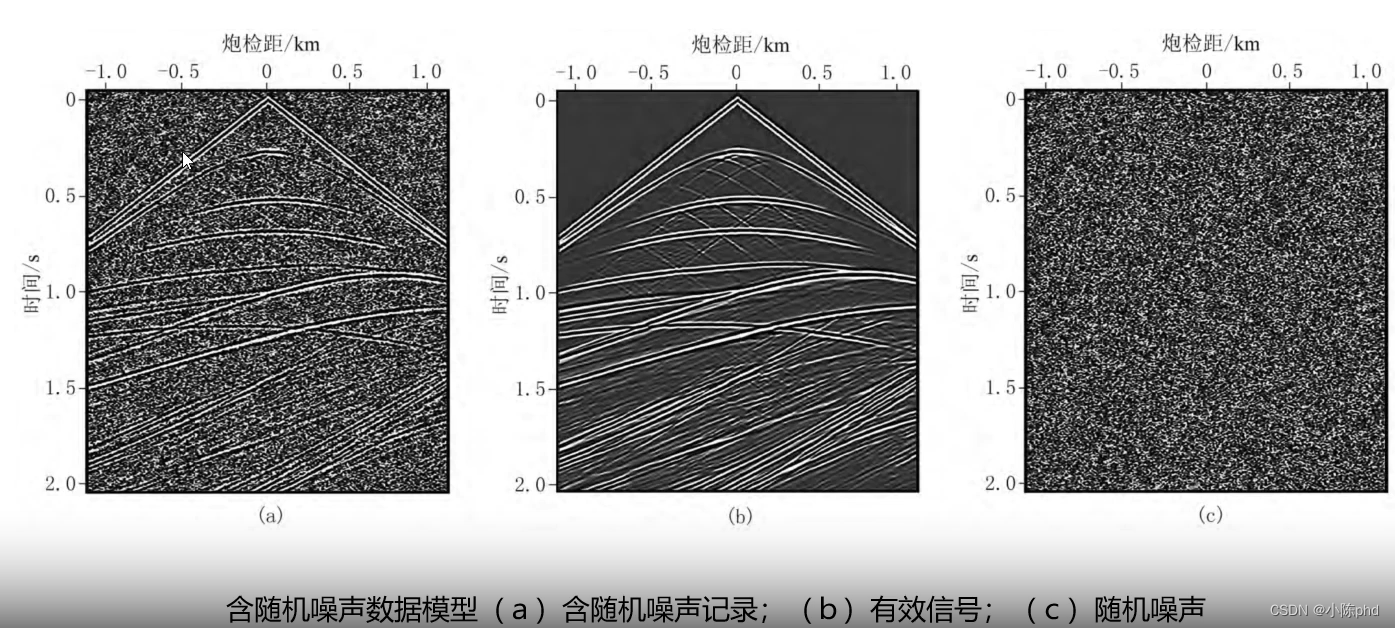
- 叠前地震数据随机噪声去除,实现噪声分离
- 面波去噪
面波作为很强的干扰波出现在地震勘探中,大大降低了地震记录的分 辨率和信噪比。深度学习作为一种数据驱动类方法, 能够从大量数据样本中 学习得到有效信号与噪声的区别, 自适应建立深度神经网络来压制噪声。
- 地震数据去噪与重建
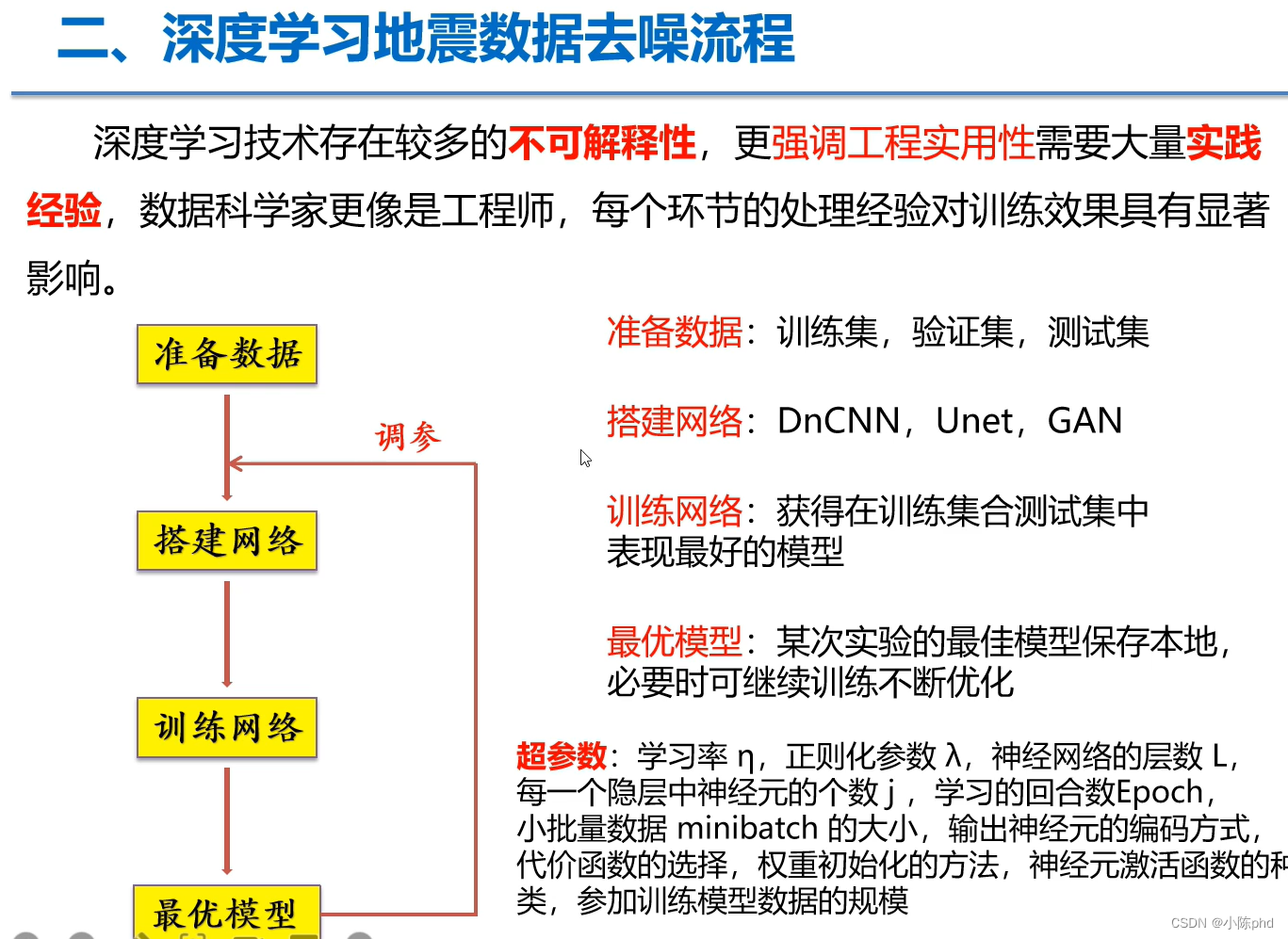
去噪流程、
- 去噪流程 - 深度学习常规流程
数据增强
- 利用数据增强方面,把地震波面波数据当作二维图像数据使用
- 那么可采用数据增强方式,
- 噪声类型添加
- 仿射变换与透视变换,裁剪
- 高级一点的:mixup,dropoutblock,mosaic,mask等等
模型设计
- 模型设计首先清晰自己需要什么,如果我们做的是噪声去除,那么针对性的模型如下:
①目标检测类CNN模型
首先清楚,地震波数据,无非是噪声数据与我想要的真实地震数据。
含有噪声的数据 = 真实地震波 + 噪声
那么模型的任务定义为目标侦测性,寻找里面的地震波或者是噪声。
- 相对来说,真实地震波数据无论是在求取还是在标注性上,都更容易求取。因此让模型找出噪声数据,利用原始数据-噪声数据 = 真实地震波数据。
这里的标签设置方法: 含噪数据,真实地震波数据
②图像分割类
将地震波去噪任务分解为地震波+噪声,对含有噪声的地震波进行分类,对地震波数据进行提取,进而获取真实地震波。
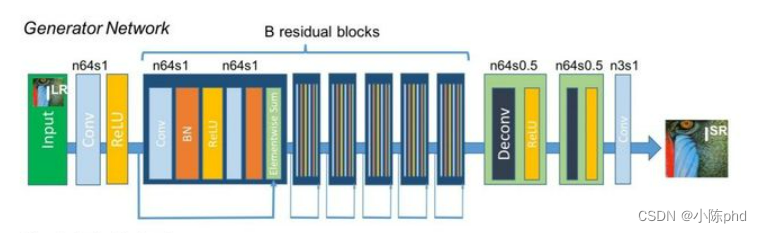
③超分技术(GAN)
标签设置方法: 含噪数据,真实地震波数据
利用超分的思想来做去噪任务,针对性的求取去噪后的图像。利用生成器直接对图像进行去噪,比较典型的油SRGAN。
如果对地震波的噪声类型有判断,可以采用CGAN的思想,对噪声类型可控化。通过已知噪声类型的方式对地震波进行针对性的去噪。
③无监督去噪(VAE系类)
利用编解码模型,对原始数据进行压缩成向量,再通过向量解码成真实地震波。
以前常用,实际应用性还可以,但是可解释性需要进一步探讨。
编程实战
这里采用下面博主教程里面的进行解释。
bilibili参考
- 对地震波数据的处理注意使用道的数据就好,其他的按照数据增强的方式走
- 数据采样原则
- 满足独立同分布的原理,可以的相同区块,但是不能的不同地方的数据。
- 数据质量> 数据数量,采样质量一定要保证,数量不是最重要的。
- 采样的标签制作,可以是(含噪数据,真实地震波),也可以是(含噪数据,噪声)
- 分布均匀,不同情况下的噪声尽可能的考虑齐全,这样模型的鲁棒性才会比较好。针对区块,地质概况,可以针对性的制作一下。
数据展示如下
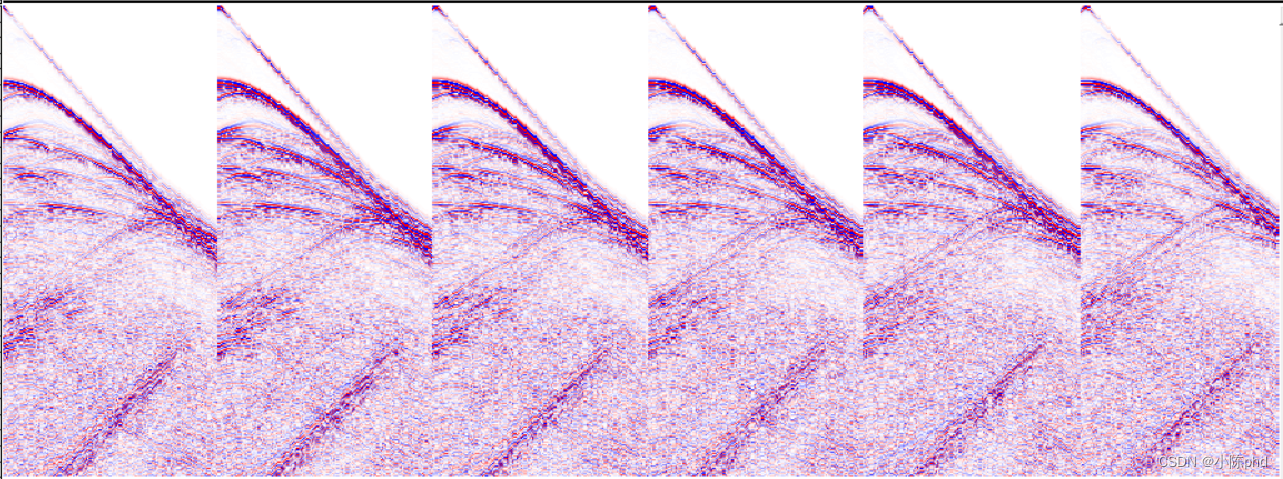
干净数据与含噪数据的展示
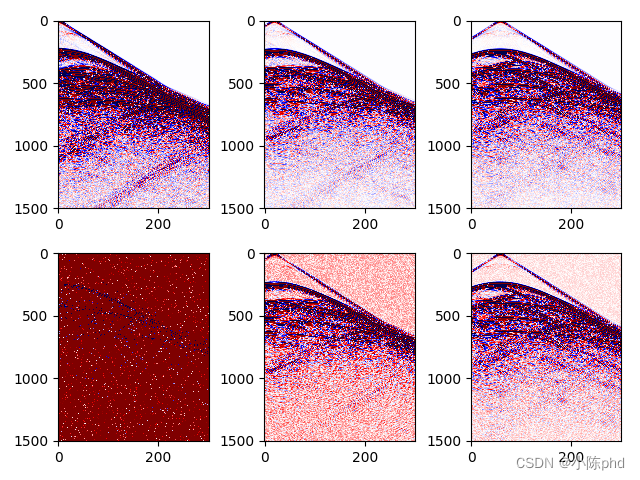
- 模型的输入与输出
地震波数据,可以定义成单通道图像,图像格式为NCHW(pytorch,paddle),NHWC(tensorflow)
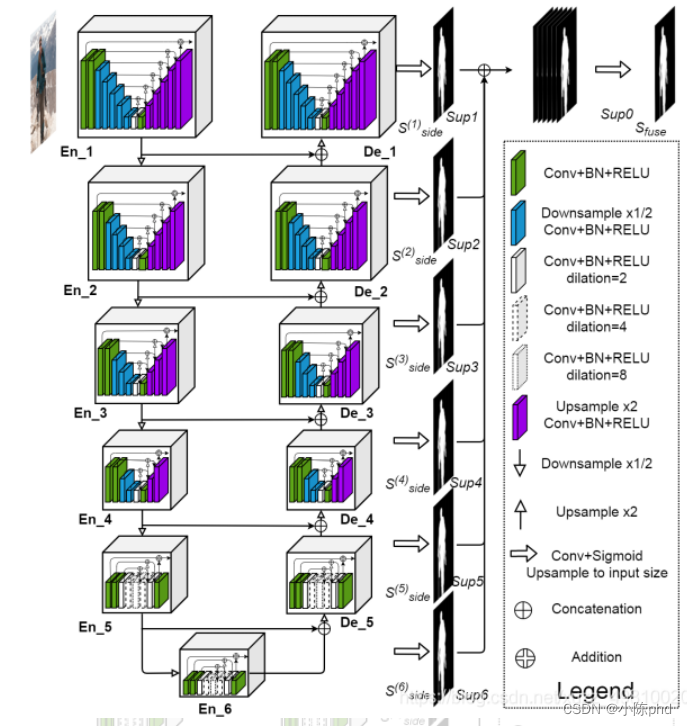
输出,如果是去噪任务,理论上输出与输入应该同型号,这里利用u2net修改了一下原up主的代码进行去噪任务。
mutiunet.py
import torch
import torch.nn as nn
from torchvision import models
import torch.nn.functional as F
class REBNCONV(nn.Module):
def __init__(self,in_ch=3,out_ch=3,dirate=1):
super(REBNCONV,self).__init__()
self.conv_s1 = nn.Conv2d(in_ch,out_ch,3,padding=1*dirate,dilation=1*dirate)
self.bn_s1 = nn.BatchNorm2d(out_ch)
self.relu_s1 = nn.ReLU(inplace=True)
def forward(self,x):
hx = x
xout = self.relu_s1(self.bn_s1(self.conv_s1(hx)))
return xout
## upsample tensor 'src' to have the same spatial size with tensor 'tar'
def _upsample_like(src,tar):
src = F.upsample(src,size=tar.shape[2:],mode='bilinear')
return src
### RSU-7 ###
class RSU7(nn.Module):#UNet07DRES(nn.Module):
def __init__(self, in_ch=3, mid_ch=12, out_ch=3):
super(RSU7,self).__init__()
self.rebnconvin = REBNCONV(in_ch,out_ch,dirate=1)
self.rebnconv1 = REBNCONV(out_ch,mid_ch,dirate=1)
self.pool1 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.rebnconv2 = REBNCONV(mid_ch,mid_ch,dirate=1)
self.pool2 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.rebnconv3 = REBNCONV(mid_ch,mid_ch,dirate=1)
self.pool3 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.rebnconv4 = REBNCONV(mid_ch,mid_ch,dirate=1)
self.pool4 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.rebnconv5 = REBNCONV(mid_ch,mid_ch,dirate=1)
self.pool5 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.rebnconv6 = REBNCONV(mid_ch,mid_ch,dirate=1)
self.rebnconv7 = REBNCONV(mid_ch,mid_ch,dirate=2)
self.rebnconv6d = REBNCONV(mid_ch*2,mid_ch,dirate=1)
self.rebnconv5d = REBNCONV(mid_ch*2,mid_ch,dirate=1)
self.rebnconv4d = REBNCONV(mid_ch*2,mid_ch,dirate=1)
self.rebnconv3d = REBNCONV(mid_ch*2,mid_ch,dirate=1)
self.rebnconv2d = REBNCONV(mid_ch*2,mid_ch,dirate=1)
self.rebnconv1d = REBNCONV(mid_ch*2,out_ch,dirate=1)
def forward(self,x):
hx = x
hxin = self.rebnconvin(hx)
hx1 = self.rebnconv1(hxin)
hx = self.pool1(hx1)
hx2 = self.rebnconv2(hx)
hx = self.pool2(hx2)
hx3 = self.rebnconv3(hx)
hx = self.pool3(hx3)
hx4 = self.rebnconv4(hx)
hx = self.pool4(hx4)
hx5 = self.rebnconv5(hx)
hx = self.pool5(hx5)
hx6 = self.rebnconv6(hx)
hx7 = self.rebnconv7(hx6)
hx6d = self.rebnconv6d(torch.cat((hx7,hx6),1))
hx6dup = _upsample_like(hx6d,hx5)
hx5d = self.rebnconv5d(torch.cat((hx6dup,hx5),1))
hx5dup = _upsample_like(hx5d,hx4)
hx4d = self.rebnconv4d(torch.cat((hx5dup,hx4),1))
hx4dup = _upsample_like(hx4d,hx3)
hx3d = self.rebnconv3d(torch.cat((hx4dup,hx3),1))
hx3dup = _upsample_like(hx3d,hx2)
hx2d = self.rebnconv2d(torch.cat((hx3dup,hx2),1))
hx2dup = _upsample_like(hx2d,hx1)
hx1d = self.rebnconv1d(torch.cat((hx2dup,hx1),1))
return hx1d + hxin
### RSU-6 ###
class RSU6(nn.Module):#UNet06DRES(nn.Module):
def __init__(self, in_ch=3, mid_ch=12, out_ch=3):
super(RSU6,self).__init__()
self.rebnconvin = REBNCONV(in_ch,out_ch,dirate=1)
self.rebnconv1 = REBNCONV(out_ch,mid_ch,dirate=1)
self.pool1 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.rebnconv2 = REBNCONV(mid_ch,mid_ch,dirate=1)
self.pool2 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.rebnconv3 = REBNCONV(mid_ch,mid_ch,dirate=1)
self.pool3 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.rebnconv4 = REBNCONV(mid_ch,mid_ch,dirate=1)
self.pool4 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.rebnconv5 = REBNCONV(mid_ch,mid_ch,dirate=1)
self.rebnconv6 = REBNCONV(mid_ch,mid_ch,dirate=2)
self.rebnconv5d = REBNCONV(mid_ch*2,mid_ch,dirate=1)
self.rebnconv4d = REBNCONV(mid_ch*2,mid_ch,dirate=1)
self.rebnconv3d = REBNCONV(mid_ch*2,mid_ch,dirate=1)
self.rebnconv2d = REBNCONV(mid_ch*2,mid_ch,dirate=1)
self.rebnconv1d = REBNCONV(mid_ch*2,out_ch,dirate=1)
def forward(self,x):
hx = x
hxin = self.rebnconvin(hx)
hx1 = self.rebnconv1(hxin)
hx = self.pool1(hx1)
hx2 = self.rebnconv2(hx)
hx = self.pool2(hx2)
hx3 = self.rebnconv3(hx)
hx = self.pool3(hx3)
hx4 = self.rebnconv4(hx)
hx = self.pool4(hx4)
hx5 = self.rebnconv5(hx)
hx6 = self.rebnconv6(hx5)
hx5d = self.rebnconv5d(torch.cat((hx6,hx5),1))
hx5dup = _upsample_like(hx5d,hx4)
hx4d = self.rebnconv4d(torch.cat((hx5dup,hx4),1))
hx4dup = _upsample_like(hx4d,hx3)
hx3d = self.rebnconv3d(torch.cat((hx4dup,hx3),1))
hx3dup = _upsample_like(hx3d,hx2)
hx2d = self.rebnconv2d(torch.cat((hx3dup,hx2),1))
hx2dup = _upsample_like(hx2d,hx1)
hx1d = self.rebnconv1d(torch.cat((hx2dup,hx1),1))
return hx1d + hxin
### RSU-5 ###
class RSU5(nn.Module):#UNet05DRES(nn.Module):
def __init__(self, in_ch=3, mid_ch=12, out_ch=3):
super(RSU5,self).__init__()
self.rebnconvin = REBNCONV(in_ch,out_ch,dirate=1)
self.rebnconv1 = REBNCONV(out_ch,mid_ch,dirate=1)
self.pool1 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.rebnconv2 = REBNCONV(mid_ch,mid_ch,dirate=1)
self.pool2 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.rebnconv3 = REBNCONV(mid_ch,mid_ch,dirate=1)
self.pool3 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.rebnconv4 = REBNCONV(mid_ch,mid_ch,dirate=1)
self.rebnconv5 = REBNCONV(mid_ch,mid_ch,dirate=2)
self.rebnconv4d = REBNCONV(mid_ch*2,mid_ch,dirate=1)
self.rebnconv3d = REBNCONV(mid_ch*2,mid_ch,dirate=1)
self.rebnconv2d = REBNCONV(mid_ch*2,mid_ch,dirate=1)
self.rebnconv1d = REBNCONV(mid_ch*2,out_ch,dirate=1)
def forward(self,x):
hx = x
hxin = self.rebnconvin(hx)
hx1 = self.rebnconv1(hxin)
hx = self.pool1(hx1)
hx2 = self.rebnconv2(hx)
hx = self.pool2(hx2)
hx3 = self.rebnconv3(hx)
hx = self.pool3(hx3)
hx4 = self.rebnconv4(hx)
hx5 = self.rebnconv5(hx4)
hx4d = self.rebnconv4d(torch.cat((hx5,hx4),1))
hx4dup = _upsample_like(hx4d,hx3)
hx3d = self.rebnconv3d(torch.cat((hx4dup,hx3),1))
hx3dup = _upsample_like(hx3d,hx2)
hx2d = self.rebnconv2d(torch.cat((hx3dup,hx2),1))
hx2dup = _upsample_like(hx2d,hx1)
hx1d = self.rebnconv1d(torch.cat((hx2dup,hx1),1))
return hx1d + hxin
### RSU-4 ###
class RSU4(nn.Module):#UNet04DRES(nn.Module):
def __init__(self, in_ch=3, mid_ch=12, out_ch=3):
super(RSU4,self).__init__()
self.rebnconvin = REBNCONV(in_ch,out_ch,dirate=1)
self.rebnconv1 = REBNCONV(out_ch,mid_ch,dirate=1)
self.pool1 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.rebnconv2 = REBNCONV(mid_ch,mid_ch,dirate=1)
self.pool2 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.rebnconv3 = REBNCONV(mid_ch,mid_ch,dirate=1)
self.rebnconv4 = REBNCONV(mid_ch,mid_ch,dirate=2)
self.rebnconv3d = REBNCONV(mid_ch*2,mid_ch,dirate=1)
self.rebnconv2d = REBNCONV(mid_ch*2,mid_ch,dirate=1)
self.rebnconv1d = REBNCONV(mid_ch*2,out_ch,dirate=1)
def forward(self,x):
hx = x
hxin = self.rebnconvin(hx)
hx1 = self.rebnconv1(hxin)
hx = self.pool1(hx1)
hx2 = self.rebnconv2(hx)
hx = self.pool2(hx2)
hx3 = self.rebnconv3(hx)
hx4 = self.rebnconv4(hx3)
hx3d = self.rebnconv3d(torch.cat((hx4,hx3),1))
hx3dup = _upsample_like(hx3d,hx2)
hx2d = self.rebnconv2d(torch.cat((hx3dup,hx2),1))
hx2dup = _upsample_like(hx2d,hx1)
hx1d = self.rebnconv1d(torch.cat((hx2dup,hx1),1))
return hx1d + hxin
### RSU-4F ###
class RSU4F(nn.Module):#UNet04FRES(nn.Module):
def __init__(self, in_ch=3, mid_ch=12, out_ch=3):
super(RSU4F,self).__init__()
self.rebnconvin = REBNCONV(in_ch,out_ch,dirate=1)
self.rebnconv1 = REBNCONV(out_ch,mid_ch,dirate=1)
self.rebnconv2 = REBNCONV(mid_ch,mid_ch,dirate=2)
self.rebnconv3 = REBNCONV(mid_ch,mid_ch,dirate=4)
self.rebnconv4 = REBNCONV(mid_ch,mid_ch,dirate=8)
self.rebnconv3d = REBNCONV(mid_ch*2,mid_ch,dirate=4)
self.rebnconv2d = REBNCONV(mid_ch*2,mid_ch,dirate=2)
self.rebnconv1d = REBNCONV(mid_ch*2,out_ch,dirate=1)
def forward(self,x):
hx = x
hxin = self.rebnconvin(hx)
hx1 = self.rebnconv1(hxin)
hx2 = self.rebnconv2(hx1)
hx3 = self.rebnconv3(hx2)
hx4 = self.rebnconv4(hx3)
hx3d = self.rebnconv3d(torch.cat((hx4,hx3),1))
hx2d = self.rebnconv2d(torch.cat((hx3d,hx2),1))
hx1d = self.rebnconv1d(torch.cat((hx2d,hx1),1))
return hx1d + hxin
##### U^2-Net ####
class U2NET(nn.Module):
def __init__(self,in_ch=3,out_ch=1):
super(U2NET,self).__init__()
self.stage1 = RSU7(in_ch,32,64)
self.pool12 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.stage2 = RSU6(64,32,128)
self.pool23 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.stage3 = RSU5(128,64,256)
self.pool34 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.stage4 = RSU4(256,128,512)
self.pool45 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.stage5 = RSU4F(512,256,512)
self.pool56 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.stage6 = RSU4F(512,256,512)
# decoder
self.stage5d = RSU4F(1024,256,512)
self.stage4d = RSU4(1024,128,256)
self.stage3d = RSU5(512,64,128)
self.stage2d = RSU6(256,32,64)
self.stage1d = RSU7(128,16,64)
self.side1 = nn.Conv2d(64,out_ch,3,padding=1)
self.side2 = nn.Conv2d(64,out_ch,3,padding=1)
self.side3 = nn.Conv2d(128,out_ch,3,padding=1)
self.side4 = nn.Conv2d(256,out_ch,3,padding=1)
self.side5 = nn.Conv2d(512,out_ch,3,padding=1)
self.side6 = nn.Conv2d(512,out_ch,3,padding=1)
self.outconv = nn.Conv2d(6,out_ch,1)
def forward(self,x):
hx = x
#stage 1
hx1 = self.stage1(hx)
hx = self.pool12(hx1)
#stage 2
hx2 = self.stage2(hx)
hx = self.pool23(hx2)
#stage 3
hx3 = self.stage3(hx)
hx = self.pool34(hx3)
#stage 4
hx4 = self.stage4(hx)
hx = self.pool45(hx4)
#stage 5
hx5 = self.stage5(hx)
hx = self.pool56(hx5)
#stage 6
hx6 = self.stage6(hx)
hx6up = _upsample_like(hx6,hx5)
#-------------------- decoder --------------------
hx5d = self.stage5d(torch.cat((hx6up,hx5),1))
hx5dup = _upsample_like(hx5d,hx4)
hx4d = self.stage4d(torch.cat((hx5dup,hx4),1))
hx4dup = _upsample_like(hx4d,hx3)
hx3d = self.stage3d(torch.cat((hx4dup,hx3),1))
hx3dup = _upsample_like(hx3d,hx2)
hx2d = self.stage2d(torch.cat((hx3dup,hx2),1))
hx2dup = _upsample_like(hx2d,hx1)
hx1d = self.stage1d(torch.cat((hx2dup,hx1),1))
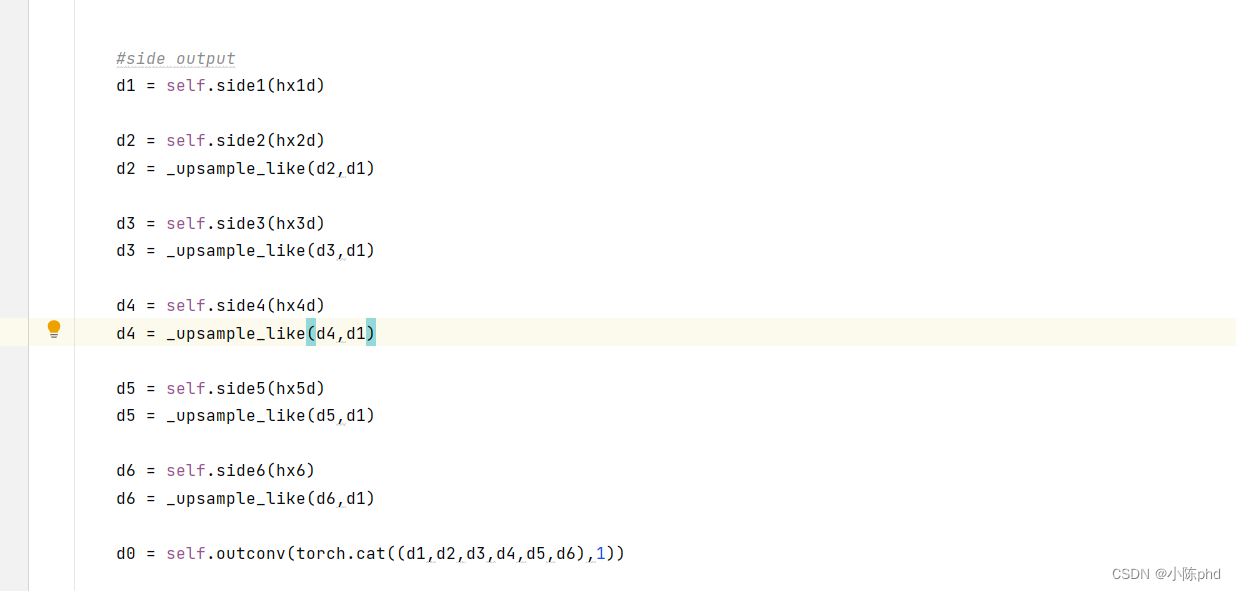
#side output
d1 = self.side1(hx1d)
d2 = self.side2(hx2d)
d2 = _upsample_like(d2,d1)
d3 = self.side3(hx3d)
d3 = _upsample_like(d3,d1)
d4 = self.side4(hx4d)
d4 = _upsample_like(d4,d1)
d5 = self.side5(hx5d)
d5 = _upsample_like(d5,d1)
d6 = self.side6(hx6)
d6 = _upsample_like(d6,d1)
d0 = self.outconv(torch.cat((d1,d2,d3,d4,d5,d6),1))
return F.sigmoid(d0), F.sigmoid(d1), F.sigmoid(d2), F.sigmoid(d3), F.sigmoid(d4), F.sigmoid(d5), F.sigmoid(d6)
### U^2-Net small ###
class U2NETP(nn.Module):
def __init__(self,in_ch=3,out_ch=1):
super(U2NETP,self).__init__()
self.stage1 = RSU7(in_ch,16,64)
self.pool12 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.stage2 = RSU6(64,16,64)
self.pool23 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.stage3 = RSU5(64,16,64)
self.pool34 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.stage4 = RSU4(64,16,64)
self.pool45 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.stage5 = RSU4F(64,16,64)
self.pool56 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.stage6 = RSU4F(64,16,64)
# decoder
self.stage5d = RSU4F(128,16,64)
self.stage4d = RSU4(128,16,64)
self.stage3d = RSU5(128,16,64)
self.stage2d = RSU6(128,16,64)
self.stage1d = RSU7(128,16,64)
self.side1 = nn.Conv2d(64,out_ch,3,padding=1)
self.side2 = nn.Conv2d(64,out_ch,3,padding=1)
self.side3 = nn.Conv2d(64,out_ch,3,padding=1)
self.side4 = nn.Conv2d(64,out_ch,3,padding=1)
self.side5 = nn.Conv2d(64,out_ch,3,padding=1)
self.side6 = nn.Conv2d(64,out_ch,3,padding=1)
self.outconv = nn.Conv2d(6,out_ch,1)
def forward(self,x):
hx = x
#stage 1
hx1 = self.stage1(hx)
hx = self.pool12(hx1)
#stage 2
hx2 = self.stage2(hx)
hx = self.pool23(hx2)
#stage 3
hx3 = self.stage3(hx)
hx = self.pool34(hx3)
#stage 4
hx4 = self.stage4(hx)
hx = self.pool45(hx4)
#stage 5
hx5 = self.stage5(hx)
hx = self.pool56(hx5)
#stage 6
hx6 = self.stage6(hx)
hx6up = _upsample_like(hx6,hx5)
#decoder
hx5d = self.stage5d(torch.cat((hx6up,hx5),1))
hx5dup = _upsample_like(hx5d,hx4)
hx4d = self.stage4d(torch.cat((hx5dup,hx4),1))
hx4dup = _upsample_like(hx4d,hx3)
hx3d = self.stage3d(torch.cat((hx4dup,hx3),1))
hx3dup = _upsample_like(hx3d,hx2)
hx2d = self.stage2d(torch.cat((hx3dup,hx2),1))
hx2dup = _upsample_like(hx2d,hx1)
hx1d = self.stage1d(torch.cat((hx2dup,hx1),1))
#side output
d1 = self.side1(hx1d)
d2 = self.side2(hx2d)
d2 = _upsample_like(d2,d1)
d3 = self.side3(hx3d)
d3 = _upsample_like(d3,d1)
d4 = self.side4(hx4d)
d4 = _upsample_like(d4,d1)
d5 = self.side5(hx5d)
d5 = _upsample_like(d5,d1)
d6 = self.side6(hx6)
d6 = _upsample_like(d6,d1)
d0 = self.outconv(torch.cat((d1,d2,d3,d4,d5,d6),1))
return d0,d1,d2,d3,d4,d5,d6
训练网络如下:
mutiunet_train.py
# -*-coding:utf-8-*-
"""
Created on 2022.3.31
programing language:python
@author:夜剑听雨
"""
# from model.dncnn import DnCNN
from model.mutiunet import U2NET
from utils.dataset import MyDataset
from utils.SignalProcessing import batch_snr
from torch import optim
import torch.nn as nn
import torch
import time
import numpy as np
import matplotlib.pyplot as plt
import os
# 选择设备,有cuda用cuda,没有就用cpu
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
# 加载网络,图片单通道1,分类为1。
my_net = U2NET(1, 1)
# 将网络拷贝到设备中
my_net.to(device=device)
# 指定特征和标签数据地址,加载数据集
train_path_x = "..\\data\\feature\\"
train_path_y = "..\\data\\label\\"
# 划分数据集,训练集:验证集:测试集 = 8:1:1
full_dataset = MyDataset(train_path_x, train_path_y)
valida_size = int(len(full_dataset) * 0.1)
train_size = len(full_dataset) - valida_size * 2
# 指定加载数据的batch_size
batch_size = 32
# 划分数据集
train_dataset, test_dataset, valida_dataset = torch.utils.data.random_split(full_dataset,
[train_size, valida_size, valida_size])
# 加载并且乱序训练数据集
train_loader = torch.utils.data.DataLoader(dataset=train_dataset, batch_size=batch_size, shuffle=True)
# 加载并且乱序验证数据集
valida_loader = torch.utils.data.DataLoader(dataset=valida_dataset, batch_size=batch_size, shuffle=True)
# 加载测试数据集,测试数据不需要乱序
test_loader = torch.utils.data.DataLoader(dataset=test_dataset, batch_size=batch_size, shuffle=False)
# 定义优化方法
epochs = 20 # 设置训练次数
LR = 0.001 # 设置学习率
optimizer = optim.Adam(my_net.parameters(), lr=LR)
# 定义损失函数
criterion = nn.MSELoss(reduction='sum') # reduction='sum'表示不除以batch_size
temp_sets1 = [] # 用于记录训练,验证集的loss,每一个epoch都做一次训练,验证
temp_sets2 = [] # # 用于记录测试集的SNR,去噪前和去噪后都要记录
start_time = time.strftime("1. %Y-%m-%d %H:%M:%S", time.localtime()) # 开始时间
if not os.path.exists(r"./save_dir/"):
os.makedirs(r"./save_dir/")
def muti_bce_loss_fusion(d0, d1, d2, d3, d4, d5, d6, labels_v):
loss0 = criterion(d0, labels_v)
loss1 = criterion(d1, labels_v)
loss2 = criterion(d2, labels_v)
loss3 = criterion(d3, labels_v)
loss4 = criterion(d4, labels_v)
loss5 = criterion(d5, labels_v)
loss6 = criterion(d6, labels_v)
loss = loss0 + loss1 + loss2 + loss3 + loss4 + loss5 + loss6
print("l0: %3f, l1: %3f, l2: %3f, l3: %3f, l4: %3f, l5: %3f, l6: %3f\n" % (
loss0.item(), loss1.item(), loss2.item(), loss3.item(), loss4.item(), loss5.item(), loss6.item()))
return loss0, loss
# 每一个epoch都做一次训练,验证,测试
for epoch in range(epochs):
# 训练集训练网络
train_loss = 0.0
my_net.train() # 开启训练模式
for batch_idx1, (batch_x, batch_y) in enumerate(train_loader, 0): # 0开始计数
# 加载数据至GPU
batch_x = batch_x.to(device=device, dtype=torch.float32)
batch_y = batch_y.to(device=device, dtype=torch.float32)
d0, d1, d2, d3, d4, d5, d6 = my_net(batch_x) # 使用网络参数,输出预测结果
# 计算loss
_, loss1 = muti_bce_loss_fusion(d0, d1, d2, d3, d4, d5, d6, (batch_x - batch_y))
train_loss += loss1.item() # 累加计算本次epoch的loss,最后还需要除以每个epoch可以抽取多少个batch数,即最后的n_count值
optimizer.zero_grad() # 先将梯度归零,等价于net.zero_grad(0
loss1.backward() # 反向传播计算得到每个参数的梯度值
optimizer.step() # 通过梯度下降执行一步参数更新
train_loss = train_loss / (batch_idx1 + 1) # 本次epoch的平均loss
# 验证集验证网络
my_net.eval() # 开启评估/测试模式
val_loss = 0.0
for batch_idx2, (val_x, val_y) in enumerate(valida_loader, 0):
# 加载数据至GPU
val_x = val_x.to(device=device, dtype=torch.float32)
val_y = val_y.to(device=device, dtype=torch.float32)
with torch.no_grad(): # 不需要做梯度更新,所以要关闭求梯度
d0, d1, d2, d3, d4, d5, d6 = my_net(val_x) # 使用网络参数,输出预测结果
# 计算loss
_, loss2 = muti_bce_loss_fusion(d0, d1, d2, d3, d4, d5, d6, (val_x - val_y))
val_loss += loss2.item() # 累加计算本次epoch的loss,最后还需要除以每个epoch可以抽取多少个batch数,即最后的count值
val_loss = val_loss / (batch_idx2 + 1)
# 训练,验证,测试的loss保存至loss_sets中
loss_set = [train_loss, val_loss]
temp_sets1.append(loss_set)
# {:.4f}值用format格式化输出,保留小数点后四位
print("epoch={},训练集loss:{:.4f},验证集loss:{:.4f}".format(epoch + 1, train_loss, val_loss))
# 测试集测试网络,采用计算一个batch数据的信噪比(snr)作为评估指标
snr_set1 = 0.0
snr_set2 = 0.0
for batch_idx3, (test_x, test_y) in enumerate(test_loader, 0):
# 加载数据至GPU
test_x = test_x.to(device=device, dtype=torch.float32)
test_y = test_y.to(device=device, dtype=torch.float32)
with torch.no_grad(): # 不需要做梯度更新,所以要关闭求梯度
d0, d1, d2, d3, d4, d5, d6 = my_net(test_x) # 使用网络参数,输出预测结果(训练的是噪声)
# 含噪数据减去噪声得到的才是去噪后的数据
clean_out = test_x - d0
# 计算网络去噪后的数据和干净数据的信噪比(此处是计算了所有的数据,除以了batch_size求均值)
SNR1 = batch_snr(test_x, test_y) # 去噪前的信噪比
SNR2 = batch_snr(clean_out, test_y) # 去噪后的信噪比
snr_set1 += SNR1
snr_set2 += SNR2
# 累加计算本次epoch的loss,最后还需要除以每个epoch可以抽取多少个batch数,即最后的count值
snr_set1 = snr_set1 / (batch_idx3 + 1)
snr_set2 = snr_set2 / (batch_idx3 + 1)
# 训练,验证,测试的loss保存至loss_sets中
snr_set = [snr_set1, snr_set2]
temp_sets2.append(snr_set)
# {:.4f}值用format格式化输出,保留小数点后四位
print("epoch={},去噪前的平均信噪比(SNR):{:.4f} dB,去噪后的平均信噪比(SNR):{:.4f} dB".format(epoch + 1, snr_set1, snr_set2))
# 保存网络模型
model_name = f'model_epoch{epoch + 1}' # 模型命名
torch.save(my_net, os.path.join('./save_dir', model_name + '.pth')) # 保存整个神经网络的模型结构以及参数
end_time = time.strftime("1. %Y-%m-%d %H:%M:%S", time.localtime()) # 结束时间
# 将训练花费的时间写成一个txt文档,保存到当前文件夹下
with open('训练时间.txt', 'w', encoding='utf-8') as f:
f.write(start_time)
f.write(end_time)
f.close()
print("训练开始时间{}>>>>>>>>>>>>>>>>训练结束时间{}".format(start_time, end_time)) # 打印所用时间
# temp_sets1是三维张量无法保存,需要变成2维数组才能存为txt文件
loss_sets = []
for sets in temp_sets1:
for i in range(2):
loss_sets.append(sets[i])
loss_sets = np.array(loss_sets).reshape(-1, 2) # 重塑形状10*2,-1表示自动推导
# fmt参数,指定保存的文件格式。将loss_sets存为txt文件
np.savetxt('loss_sets.txt', loss_sets, fmt='%.4f')
# temp_sets2是三维张量无法保存,需要变成2维数组才能存为txt文件
snr_sets = []
for sets in temp_sets2:
for i in range(2):
snr_sets.append(sets[i])
snr_sets = np.array(snr_sets).reshape(-1, 2) # 重塑形状10*2,-1表示自动推导
# fmt参数,指定保存的文件格式。将loss_sets存为txt文件
np.savetxt('snr_sets.txt', snr_sets, fmt='%.4f')
# 显示loss曲线
loss_lines = np.loadtxt('./loss_sets.txt')
# 前面除以batch_size会导致数值太小了不易观察
train_line = loss_lines[:, 0] / batch_size
valida_line = loss_lines[:, 1] / batch_size
x1 = range(len(train_line))
fig1 = plt.figure()
plt.plot(x1, train_line, x1, valida_line)
plt.xlabel('epoch')
plt.ylabel('loss')
plt.legend(['train', 'valida'])
plt.savefig('loss_plot.png', bbox_inches='tight')
plt.tight_layout()
# 显示snr曲线
snr_lines = np.loadtxt('./snr_sets.txt')
De_before = snr_lines[:, 0]
De_after = snr_lines[:, 1]
x2 = range(len(De_before))
fig2 = plt.figure()
plt.plot(x2, De_before, x2, De_after)
plt.xlabel('epoch')
plt.ylabel('SNR')
plt.legend(['noise', 'denoise'])
plt.savefig('snr_plot.png', bbox_inches='tight')
plt.tight_layout()
plt.show()
训练图像
模型优化方向
- 注意力以及编解码模型的运用,针对局部噪声,如果与其他空间位置有关系,可以采用注意力或者增大感受野的方式进行解决。更多偏向于模型对整体地震波的感知。
- 针对复杂噪声,模型可以多尺度化,不止是针对模型出现的噪声,更针对地震波在语义上的特征也可以进行去噪化。真实的地震波不止出现在最后,也可以在多个尺度内对地震波进行去噪。
- 优化函数多样化
针对的目标一致的情况下, 可以添加相对应的代价评估函数,损失函数设计等等,模型欠拟合可以采用非线性更为强悍的激活函数,模型过拟合时,常常要通过正则化、提前终止、学习率衰减等方式进行解决。视具体任务而言
- 预处理多样化
相对复杂的任务,可能模型的鲁棒性达不到要求,一般可以通过一些常规的算法进行数据的预处理工作,包括无监督,傅里叶去噪等等,模型学习通过预处理 的数据的时候加快收敛速度
参考bilibili 基于深度学习的地震数据去噪处理
有兴趣的小伙欢迎一起探讨技术,附个人微信
本人测井方向、数字岩心导电性的数值模拟。
