目录
3.1 雷达成像特点
3.2 成像雷达的种类
3.3 合成孔径雷达简介
3.4 成像雷达距离向的高分辨率原理
3.5 成像雷达
3.6 合成孔径雷达的理论模型
3.7 图像质量评估指标
3.8 小结
3.1 雷达成像特点
-
雷达具有对运动目标(飞机、导弹等)、区域目标(地面等)进行成像和识别的能力;
-
雷达成像的基本目的是实现目标成像、分类和识别
-
雷达成像特点:
a. 高分辨率
b. 有源系统、主动发射电磁波,全天时成像
c. 微波穿透性,不受云雨雾影响,全天候成像
d. 雷达成像技术包含目标的多种散射信息,具有大的动态范围和精密测距能力
-
雷达成像的基本原理:采用各种方法提高雷达的诸维分辨率,使其分辨率单元的尺寸与被成像的目标尺寸相比小得多,从而得到目标不同部位的信息以构成雷达图像
a. 距离向分辨率:发射宽带信号
b. 方位向分辨率:大实孔径天线或等效极大孔径
3.2 成像雷达的种类
-
按照雷达平台分类
a. 机载成像雷达
b. 星载成像雷达
-
孔径类别分类
a. 实孔径雷达
b. 合成孔径雷达
c. 微波全息成像雷达
d. 合成孔径雷达干涉仪(InSAR)
-
按照运动方式分类:
a. 合成孔径雷达(雷达运动、目标不动)
b. 逆合成孔径雷达(ISAR)(雷达不动、目标运动)
-
按照辐射源分类
a. 无源成像雷达
b. 有源成像雷达
3.3 合成孔径雷达简介
-
合成孔径雷达能实现二维高分辨率成像
-
合成孔径雷达
a. 方位向:雷达测绘带内,沿雷达运动的方向
b. 距离向:雷达测绘带内与航迹垂直的方向
-
雷达一面作匀速直线运动,一面以一定的脉冲重复频率发射并接收信号
a. 距离向:利用发射大时间宽带积的线性调频信号,采用脉冲压缩技术获取高分辨率
b. 方位向:通过同一雷达传感器在等间隔位置上发射和接收脉冲信号,然后将接收的回波信号进行适当处理获得高分辨率(利用目标与雷达的相对运动形成的轨迹构建一个合成孔径以取代庞大的阵列实孔径),从而达到高分辨率、
-
合成孔径雷达方位向及距离向示意图
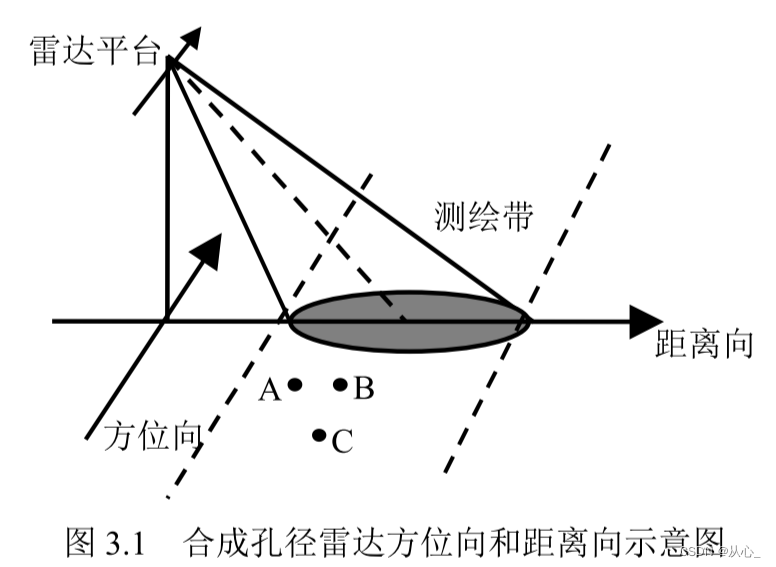
a. 雷达波束照射区域:阴影部分;随雷达的匀速直线运动,测绘带将为一条带状区域
-
分辨率
a. 距离向分辨率:雷达能够区分的同一方位不同距离的两个目标的能力
b. 方位向分辨率:能够区分的不同方位同一距离的两个目标的能力
-
合成孔径天线阵列示意图
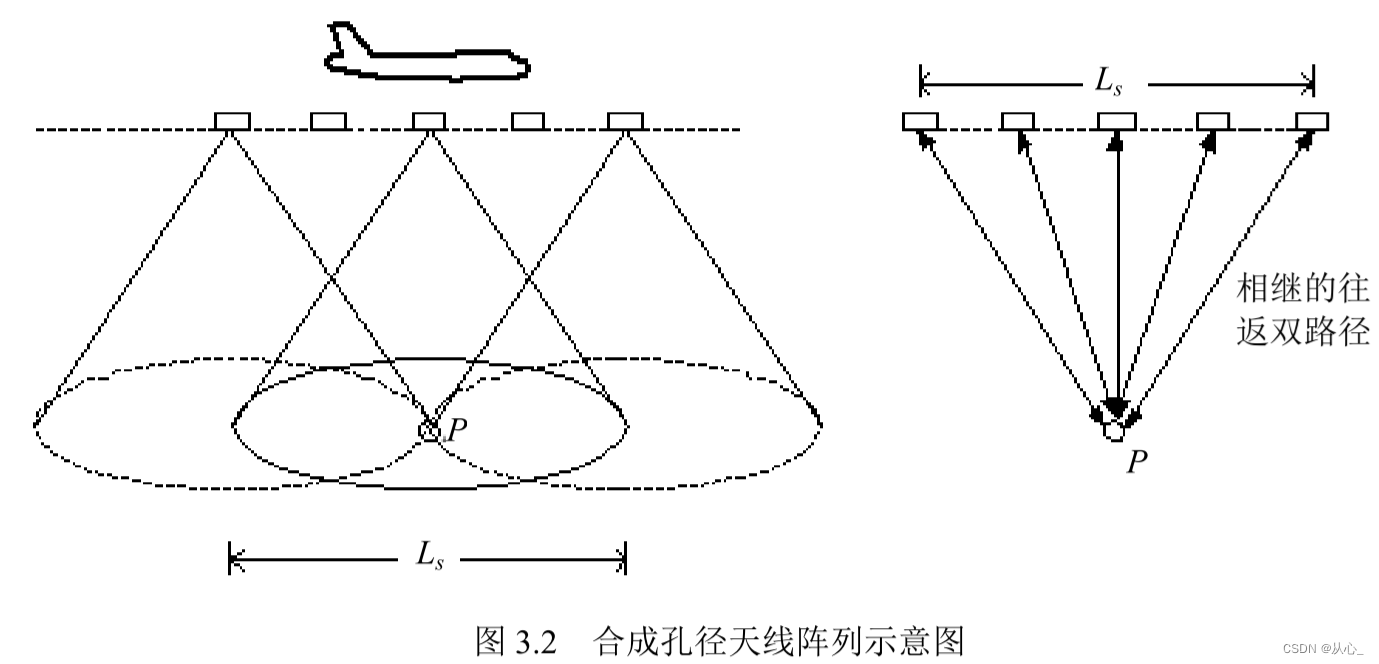
雷达平台在很多位置上都能收到来自同一目标的回波信号,相当于在空中形成了一个大的天线阵列,从而提高了方位向分辨率
3.3.1 合成孔径雷达的分类
-
雷达载体不同
a. 星载SAR
b. 机载SAR
c. 无人机载SAR
-
工作方式不同
a. 条带模式:雷达波束的照射范围是一条与雷达飞行方向平行的条带区域
b. 聚束模式:雷达波束不断变化,可以在很长时间内照射同一区域
c. 扫描模式:雷达波束能够迅速的在数个子观测带之间转换
-
雷达波束指向和雷达运动方向夹角的不同
a. 正侧视:雷达波束指向和雷达的运动方向垂直
b. 斜视:夹角小于90°
c. 前视
-
信号处理方式划分
a. 聚焦:聚焦合成孔径是以目标散射点为圆心,距离R为半径的圆弧,圆弧上任一点接收到的回波信号都是同相的,经叠加后可获得高分辨率。但实际雷达飞行路线是直线而不是圆弧,所以成像处理时应该将直线孔径上的各点与圆弧孔径之间的相位差补偿掉,通常含有这种补偿的成像处理叫做聚焦处理。
b. 非聚焦:不含有上述相位差补偿

3.3.2 合成孔径雷达的极化方式
-
合成孔径雷达发射的电磁波有多种极化方式
a. 发射和接收都采用水平极化方式(HH)
b. 发射和接收都采用垂直极化方式(VV)
c. 发射为水平极化,接收为垂直极化(HV)
d. 发射为垂直极化,接收为水平极化(VH)
ps:采用多频段、多极化工作的SAR系统将具有更好的成像质量和目标分辨能力;交叉极化相比同极化的渗透能力弱
-
极化
a. 水平极化(H):水平极化是指卫星向地面发射信号时,其无线电波的振动方向是水平方向。例如:我们拿一条绳子左右抖动,产生的波是左右波动。
b. 垂直极化(V):垂直极化是指卫星向地面发射信号时,其无线电波的振动方向是垂直方向。例如:我们拿一条绳子上下抖动,产生的波是上下波动。
-
水平极化和垂直极化的接收
垂直极化和水平极化的接收,是改变馈源的矩形(长方形)波导口方向来确定接收的是垂直极化或水平极化。当矩形波导口的长边平行于地面时接收的是垂直极化, 垂直于地面时接收的是水平极化。极化方向(极化角)又因地而异有所偏差。因为地球是个球体,而卫星信号的下行波束却是水平直线传播,这就造成不同方位角所收的同一极化信号有所不同,所以地理位置不同,所接收的信号极化方向也有所偏差。
3.3.3 合成孔径雷达的信号接收方式
- 合成孔径雷达的信号处理采用数字处理方式,采集到的原始数据是一个二维数组
- 由于雷达一面运动,一面以一定的脉冲重复频率发射并接收线性调频的脉冲信号,处理器要对接收到的每一个脉冲信号进行采样,并一排排的存储起来,这样就形成了一个二维数组,
a. 数组每一行的数据为发射的线性调频脉冲的各个采样点的值(距离向)
b. 每一列的数据为雷达在不同的空间位置接收到的线性调频脉冲的相应的采样点的值。(方位向)
3.3.4 合成孔径雷达的特点
- 二维高分辨率
- 分辨率与波长、载体的飞行高度和雷达的作用距离无关
- 投射性强,不受昼夜等因素的影响,具有全天候成像的特点,选择合适的雷达波长,可穿透一定遮蔽物
- 包括多种散射信息:不同的目标,对微波的不同频率、入射角及极化方式将呈现不同的散射特性和不同的穿透力,这一性质为目标分类及识别提供了极为有效的新途径
- 多功能多用途:例如采用并行轨道或者一定基线长度的双天线,可以获得包括地面高度信息在内的三维高分辨率图像
- 多极性、多频段、多工作模式
- 实现合成孔径原理,需要复杂的信号处理过程和设备
- 与一般相干成像类似,SAR图像具有相干斑效应,影响图像质量,需要用多视平滑技术减轻其有害影响
3.3.5 合成孔径雷达的应用
- 地址测绘和制图学方面
- 海洋应用:大面积海浪特性、冰川分布、海洋污染等
- 农业和林业应用:农作物鉴定和研究植被分布
- 军事:全天候全球战略侦察、全天候重点战区军事监视、掩藏目标散射特性的静态动态测量
3.3.6 合成孔径雷达的发展
- 通过距离向的脉冲压缩和方位向的匹配滤波可以获得距离向和方位向的高分辨率图像
3.3.7 目标的后向散射系数
- 通常用目标的后向散射系数
σ
\sigma
σ 来表征地物目标的散射特性。若雷达发射的信号功率为
P
_
s
P\_s
P_s ,则雷达照射后向散射系数为
P
r
=
P
s
G
2
λ
σ
2
(
4
π
)
3
R
4
P_r=\frac{P_sG^2\lambda\sigma^2}{(4\pi)^3R^4}
Pr=(4π)3R4PsG2λσ2
其中:
G
G
G 为天线增益、
/
l
a
m
b
d
a
/lambda
/lambda 为目标波长 ,
R
R
R 为雷达与目标之间的距离
对于不同的电磁波极化方式及不同的电磁波波段,同一目标的后向散射系数特性是不同的