1 点云基本概念
1.1 点云结构公共字段
PCL包含一个重要的数据结构,被设计成一个模板类,把点的类型当做模板类的参数。pcl::PointCloud<point T>类似于vector。
header:pcl::PCLHeader 记录了点云的获取时间
points:std::vector<PointT,…>储存所有点的容器。vector定义中的PointT对应的类的模板参数,即点的类型
width:指定点云组织成图像时的宽度
height:指定点云组成图像时的高度
is_dense: 指定点云中是否有无效值
sensor_origin_:是Eigen::Vector4f类型,传感器相对于原点平移所得的位姿
sensor_orientation_:是Eigen::Quaternionf类型,定义传感器旋转所得的位姿
1.2 点云类型
PointT是pcl::PointCloud类的模板参数,定义点云的类型
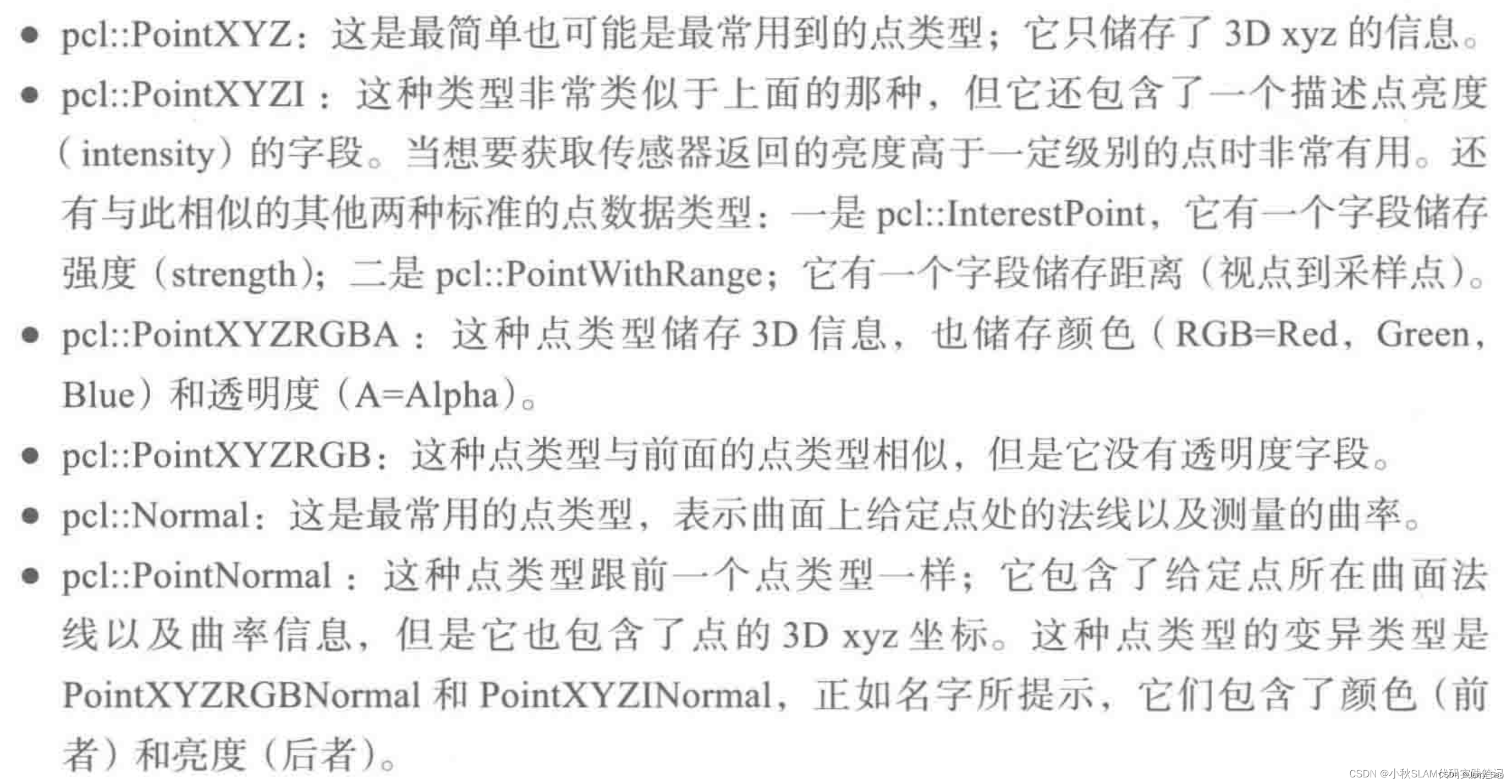
pcl::PointXYZ 位置
pcl::PointXYZI 位置+亮度
pcl::PointXYZRGBA 位置+颜色+透明度
pcl::PointXYZRGB 位置+颜色
pcl::Normal 表示曲面上给定点处的法线以及测量的曲率
pcl::PointNormal 曲率信息+位置
1.3 ROS的PCL接口
定义不同的消息类型去处理点云的数据
std_msgs::Header 不是真的消息类型,它包含发送的时间、序列号等
sensor_msgs::PointCloud2 用来转换pcl::PointCloud类型
pcl_msgs::PointIndices 储存点云的索引
pcl_msgs::PolygonMesh 保存了描绘网格、定点和多边形
pcl_msgs::Vertices 将一组定点的索引保存在数组中
pcl_msgs::ModelCoefficients 储存一个模型的不同系数,如描述一个平面需要四个参数
1.4 pcl-ros点云格式转换
三种格式:
sensor_msgs::PointCloud
sensor_msgs::PointCloud2
pcl::PointCloud<T>
其中,PointCloud2和pcl::PointCloud可以相互转换,PointCloud和PointCloud2可以相互转换,PointCloud和pcl::PointCloud的转换需要使用PointCloud2中转。
PointCloud⟺PointCloud2⟺pcl::PointCloud<T>
ROS中sensor_msgs::PointCloud2类型消息解读,参考:https://blog.csdn.net/weixin_40826634/article/details/108767704
上述变换的实现:
1、PointCloud2to PointCloud
#include "sensor_msgs/point_cloud_conversion.h"
static inline bool convertPointCloud2ToPointCloud (
const sensor_msgs::PointCloud2 &input, sensor_msgs::PointCloud &output);
2、PointCloudto PointCloud2
#include "sensor_msgs/point_cloud_conversion.h"
static inline bool convertPointCloudToPointCloud2 (
const sensor_msgs::PointCloud &input, sensor_msgs::PointCloud2 &output)
3、pcl::PointCloud<T>to PointCloud2
#include "pcl_conversions/pcl_conversions.h"
template<typename T>
void toROSMsg(const pcl::PointCloud<T> &pcl_cloud, sensor_msgs::PointCloud2 &cloud)
{
pcl::PCLPointCloud2 pcl_pc2;
pcl::toPCLPointCloud2(pcl_cloud, pcl_pc2);
pcl_conversions::moveFromPCL(pcl_pc2, cloud);
}
4、PointCloud2to pcl::PointCloud<T>
#include "pcl_conversions/pcl_conversions.h"
template<typename T>
void fromROSMsg(const sensor_msgs::PointCloud2 &cloud, pcl::PointCloud<T> &pcl_cloud)
{
pcl::PCLPointCloud2 pcl_pc2;
pcl_conversions::toPCL(cloud, pcl_pc2);
pcl::fromPCLPointCloud2(pcl_pc2, pcl_cloud);
}
2 创建点云并发布ROS点云话题
2.1 创建功能包
catkin_create_pkg point_cloud_pkg std_msgs rospy roscpp sensor_msgs pcl_ros pcl_conversions std_srvs message_generation
2.2 发布ROS点云话题
create_point_cloud_pub.cpp
#include<iostream>
#include<pcl/point_types.h>
#include<pcl_conversions/pcl_conversions.h>
#include<ros/ros.h>
#include<sensor_msgs/PointCloud2.h>
int main(int argc, char** argv)
{
ros::init(argc, argv, "point_cloud_node");
ros::NodeHandle nh;
ros::Publisher pub = nh.advertise<sensor_msgs::PointCloud2>("/point_cloud_publisher_topic", 1000);
ros::Rate rate(