一、准备录制
这部分内容主要参考了博主 huawwenwnewn 的文章http://t.csdn.cn/yvkdz,非常感谢!
1、建立工作空间在imu_data.cpp 写入以下内容
mkdir -p publish_ws/src
cd publish_ws/src
catkin_create_pkg imu_publish std_msgs rospy roscpp
cd imu_publish/src
vim imu_data.cpp
在imu_data.cpp 写入以下内容
// Step 1: Include Library Headers:
//发布imu的数据到IMU_data
#include <ros/ros.h>
#include <sensor_msgs/Imu.h>
int main(int argc, char** argv)
{
// Step 2: Initialization:
ros::init(argc, argv, "imu");
ros::NodeHandle n;
ros::Publisher IMU_pub = n.advertise<sensor_msgs::Imu>("IMU_data", 20);
ros::Rate loop_rate(50);
while(ros::ok())
{
sensor_msgs::Imu imu_data;
imu_data.header.stamp = ros::Time::now();
imu_data.header.frame_id = "base_link";
//四元数位姿,所有数据设为固定值,可以自己写代码获取IMU的数据,,然后进行传递
imu_data.orientation.x = 0;
imu_data.orientation.y = -1;
imu_data.orientation.z = -5;
imu_data.orientation.w = 6;
//线加速度
imu_data.linear_acceleration.x = 0.01;
imu_data.linear_acceleration.y = 0.02;
imu_data.linear_acceleration.z = 0.03;
//角速度
imu_data.angular_velocity.x = 0.05;
imu_data.angular_velocity.y = 0.06;
imu_data.angular_velocity.z = 0.07;
IMU_pub.publish(imu_data);
ros::spinOnce();
loop_rate.sleep();
}
return 0;
}
改一下CMakeLists.txt
cd imu_publish
vim CMakeLists.txt
添加以下内容
add_executable(imu_data src/imu_data.cpp)
target_link_libraries(imu_data ${catkin_LIBRARIES})
如图所示

回到工作空间下编译
2、硬件连接
将imu连接到电脑上,终端运行
ls -l /dev/ttyUSB* //确定连接成功
sudo chmod 777 /dev/ttyUSB0 //打开串口权限
二、开始录制
终端1:运行roscore
终端2:发布imu数据
注意,这里要source一下,确定ROS_PACKAGE_PATH是在当前工作空间下。如图:

终端3:
rosbag record /IMU_data
等待两小时......然后ctr+C停止录制。注意,这里的 /IMU_data 是自己的话题名称,不要写错了,如果不知道是什么,看看前面编写的 imu_data.cpp 里面的 publisher 那一行。
若要查看录制包的信息:另开终端运行
rosbag info 包名
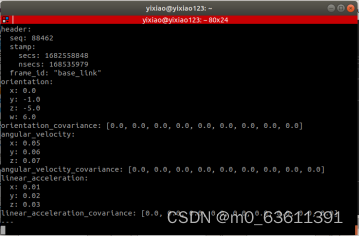
若要查看话题信息,终端4:rostopic echo /IMU_data
若想可视化,终端5,运行命令rviz,在可视化界面点击ADD,选中imu_plugin底下的imu,点击ok。左侧Fixed Frame那里,填上对应的名称(终端4里有)。imu底下的topic那里,点击小三角,会出现,选中即可。最后会出现个坐标系,如图:

三、配置imu标定的环境
这部分主要参考了博主Yudel Koh 的文章RealSense D435i + imu 标定 Ros Melodic_rs_camera.launch_Yudel Koh的博客-CSDN博客
1、安装ceres
2、创建imu标定的工作空间
mkdir -p ~/imu_catkin_ws/src
cd ~/imu_catkin_ws/src
catkin_init_workspace
cd ~/imu_catkin_ws
catkin_make
source ~/imu_catkin_ws/devel/setup.bash
3、下载code_utils并编译(注意这里一定要先下载编译完code_utils,再下载编译imu_utils)
cd ~/imu_catkin_ws/src
git clone https://github.com/gaowenliang/code_utils.git
cd ~/imu_catkin_ws
catkin_make
如果报错看看上面的参考文章。
4、下载imu_utils并编译
cd ~/imu_catkin_ws/src
git clone https://github.com/gaowenliang/imu_utils.git
cd ~/imu_catkin_ws
catkin_make
5、编写标定参数文件
cd ~/imu_catkin_ws/src/imu_utils/launch
touch imu_calibration.launch
gedit imu_calibration.launch
在imu_calibration.launch文件里写入以下内容:
<launch>
<node pkg="imu_utils" type="imu_an" name="imu_an" output="screen">
<param name="imu_topic" type="string" value= "/IMU_data"/>
<param name="imu_name" type="string" value= "wit_imu"/> //这里是imu的名字,自己随便取
<param name="data_save_path" type="string" value= "$(find imu_utils)/data/"/>
<param name="max_time_min" type="int" value= "120"/> //单位:分钟,不要长于自己的录制时间
<param name="max_cluster" type="int" value= "100"/>
</node>
</launch>
(添加该文件之后不需要重新编译工作空间)
环境配置准备工作至此完成
四、开始标定imu内参
录制包默认放在主目录下,需将它拷到imu_catkin_ws 空间下,并改名为 imu_calibration.bag(如果在录制时制定存放位置和包名,这一步可以其实可以省掉,但是我没有用这个命令因为命令格式没写对)

终端1:
cd imu_catkin_ws
roslaunch imu_utils imu_calibration.launch
终端2:
cd imu_catkin_ws
rosbag play -r 200 imu_calibration.bag //以200倍的速度播放该文件
标定结果,:文件wit_imu_imu_param.yaml

文件wit_imu_imu_param.yaml里的内容:

至此,完成。