简介:介绍银牛微电子 3D 机器视觉R132相机 在EHub_tx1_tx2_E100载板,TX1核心模块环境(Ubuntu18.04)下测试ROS驱动,打开摄像头图像和查看深度图和点云图,本文的前提条件是你的TX1里已经安装了ROS版本:Melodic。关于测试硬件EHub_tx1_tx2_E100载板请查看:EdgeBox_EHub_tx1_tx2_E100 开发板评测_机器人虎哥的博客-CSDN博客
大家好,我是虎哥,最近都在看如何更好的实现机器人的避障,补死角的方案,查阅了好几款深度相机的方案,正好手里还有之前采购的银牛 的R132模组,有感于网上对于上手就可以简单玩起来的说明比较少,所以总结一下自己的简单测试经验,分享给大家。

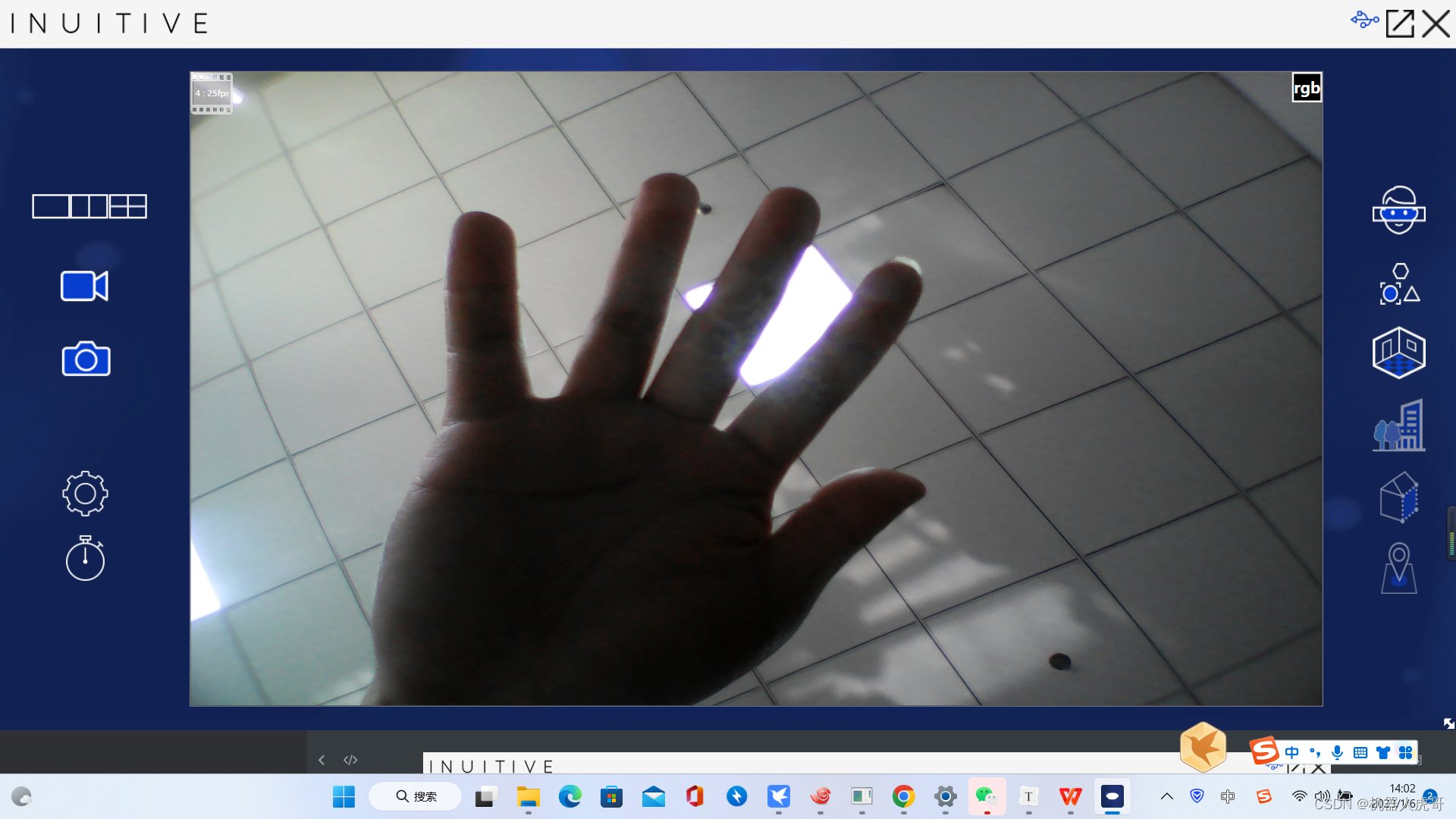
官网入口是:模组-银牛微电子(无锡)有限责任公司 官网资料有限。
目录
一、 银牛 “R132“ 深度相机
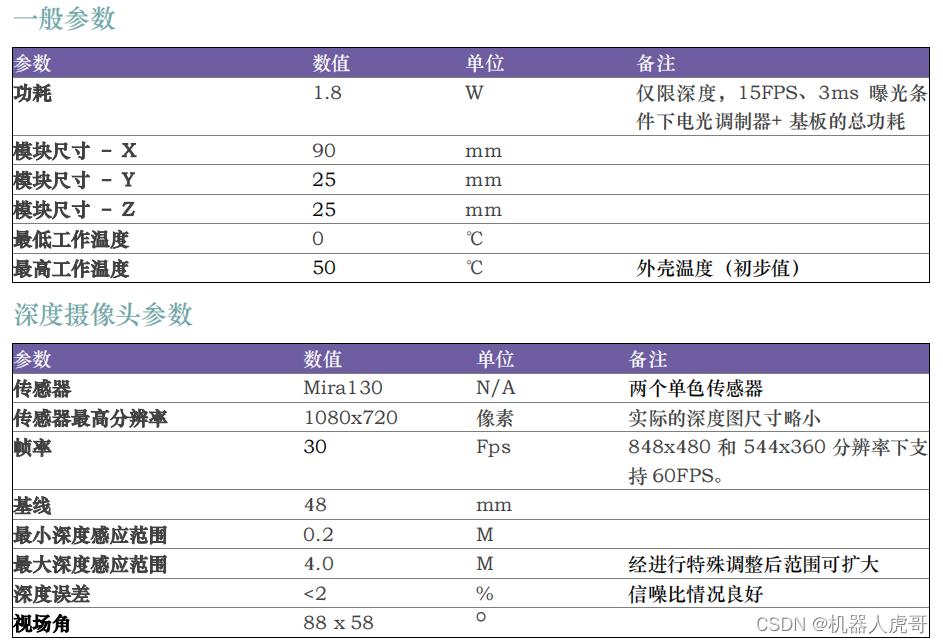
1.1 关键参数:
二、WIN 下测试流程
2.1 驱动安装:
1、安装驱动 步骤
2.2 SDK及 Inuview工具 安装
2.3 Inuview工具 测试相机
1、活动流选择显示深度数据:
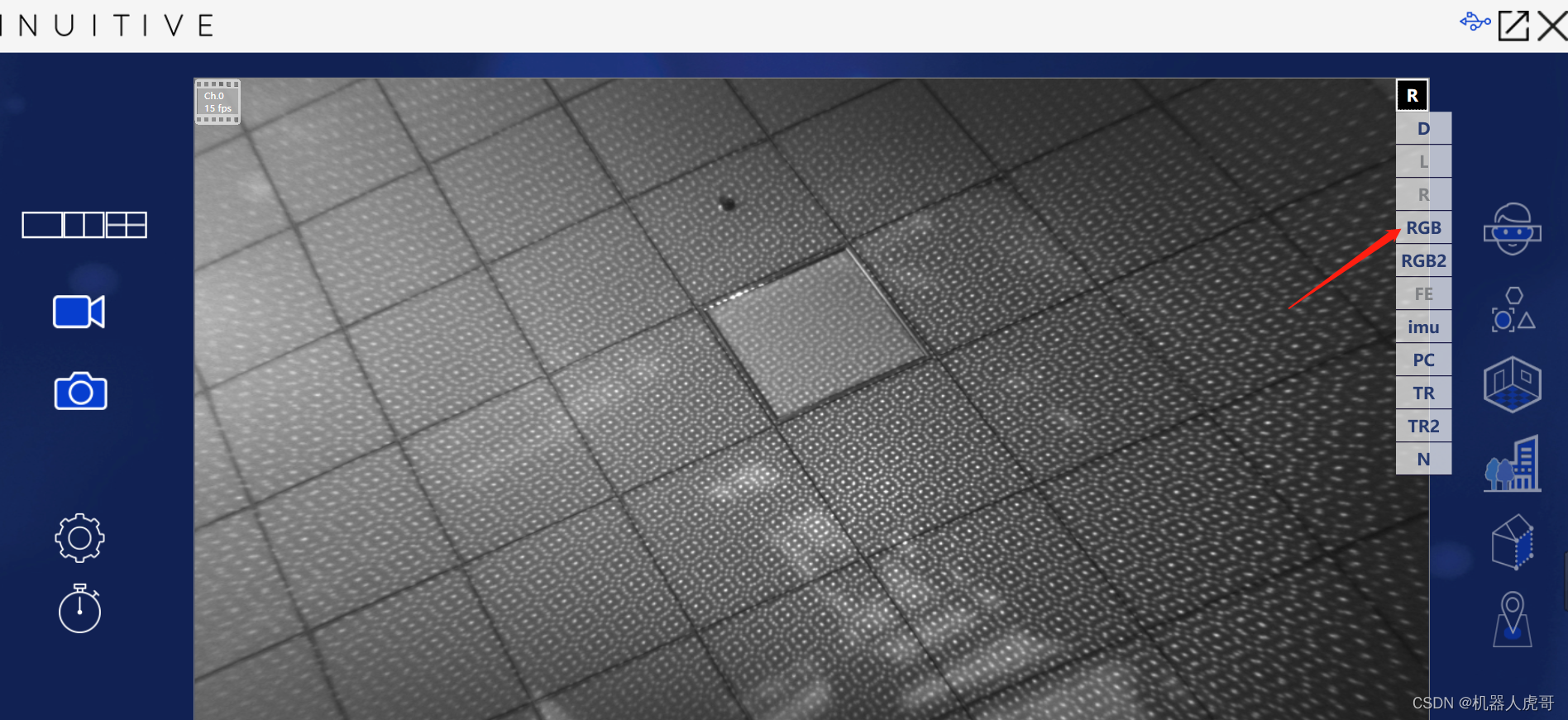
2、活动流选择显示RGB数据:
3、活动流选择显示IMU数据:
三、ROS 下测试流程
4.1 拷贝代码
4.2 插入模组USB至板子
4.3 安装官方程序
4.4 测试启动
4.5 RVIZ 显示IMU数据
4.6 rqt_image_view RGB、红外、深度图
4.7 RVIZ RGB、红外、深度图
四. 只启动相机驱动的LAUNCH修改
修改
一、 银牛 “R132“ 深度相机

主要配置
■ 基于IR主动有源立体深度传感器
■ 0.2-4米深度测量范围
■ 宽视场角(88°x 58°FoV)
■ RGB 摄像头传感器,与深度传感器对齐
■ 采用Inuitive的NU4000多核计算机视觉与三维图像处理器
■ 经过详尽的内外参标定的机载惯性测量单元(IMU)
■ 功率低、体积小
■ 高速USB-Type C主机接口(USB 3.0)
■ 高速MIPI CSI 2.0主机接口
■ 支持Windows、Linux和Android OSs 操作系统
■ 可在所有照明条件下工作(从夜晚到白昼)
■ 应用程序接口,使应用层的设计变得更容易
1.1 关键参数:

详细手册获取网站入口:客户支持-银牛微电子(无锡)有限责任公司
二、WIN 下测试流程
需要资料和对应软件,需要联系厂家直接要就可以。首先在WIN端测试,需要安装驱动程序。R132是一种即插即用的USB装置,包含一个专用的驱动程序。
2.1 驱动安装:
没安装驱动程序前,将R132的USB口接入测试电脑:
1、安装驱动 步骤
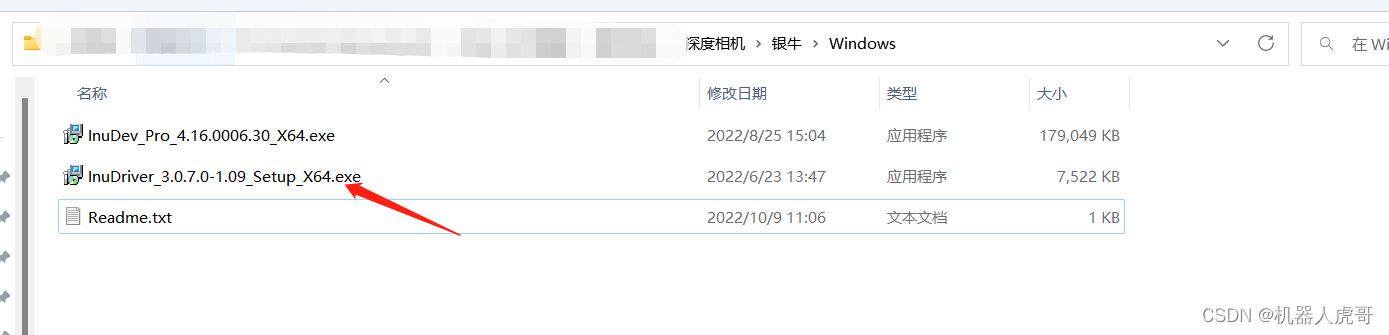
双击InuDriver_3.0.7.0-1.09_Setup_X64进行驱动安装。
一路默认next即可。
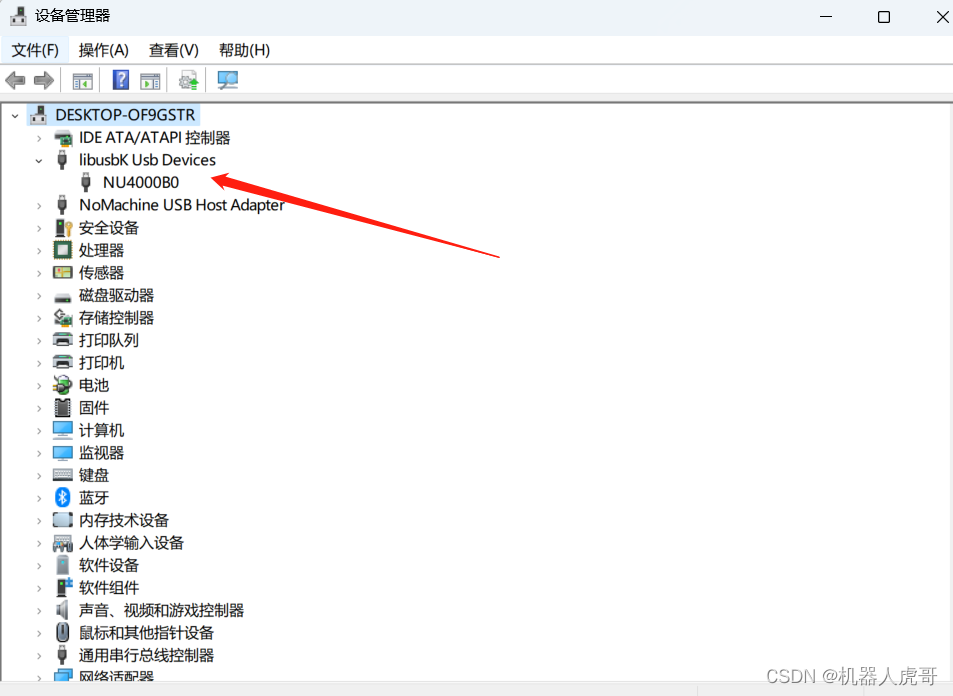
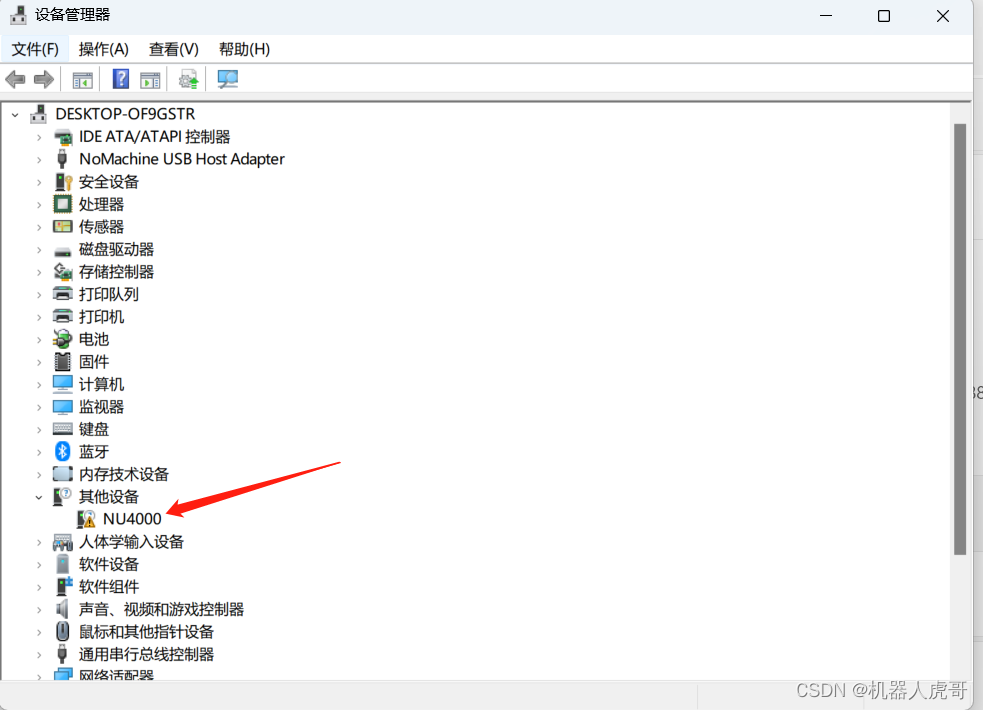
安装完毕后,即可以再自己电脑设备管理器看到设备了。
2.2 SDK及 Inuview工具 安装
可以参考文档:腾讯文档
双击InuDev_Pro_4.16.0006.30_X64进行工具安装
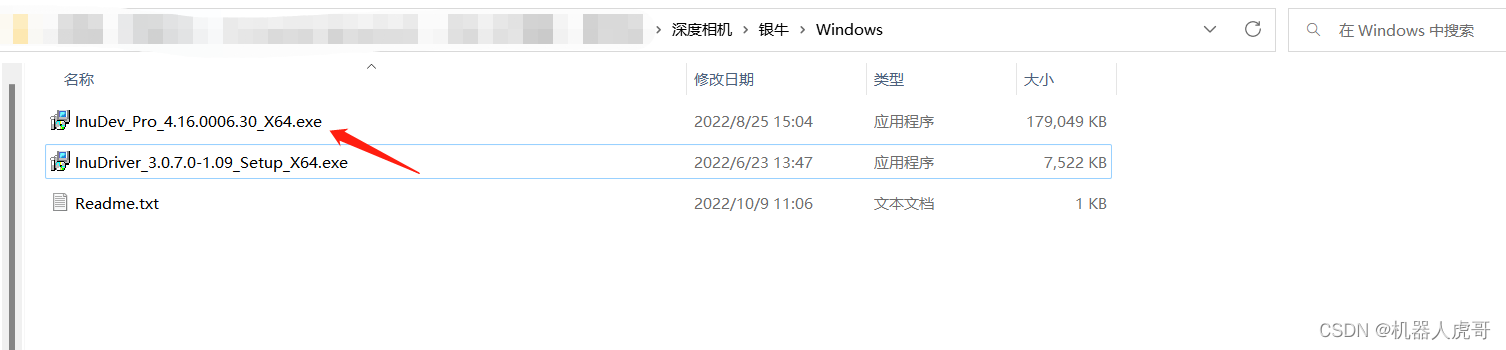
然后一路NEXT就可以。
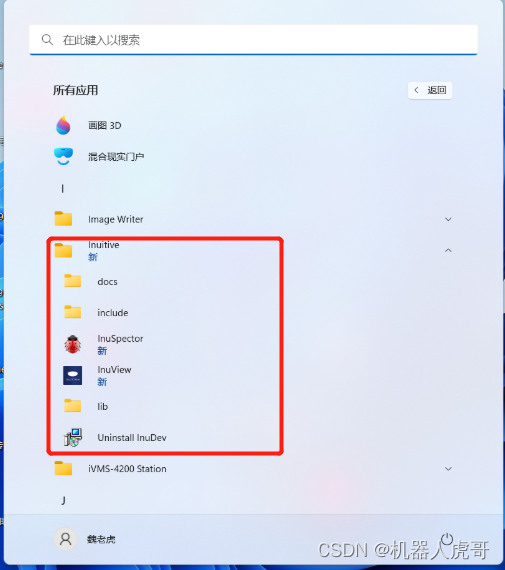
支持工具软件安装完毕。
2.3 Inuview工具 测试相机
打开InuView工具
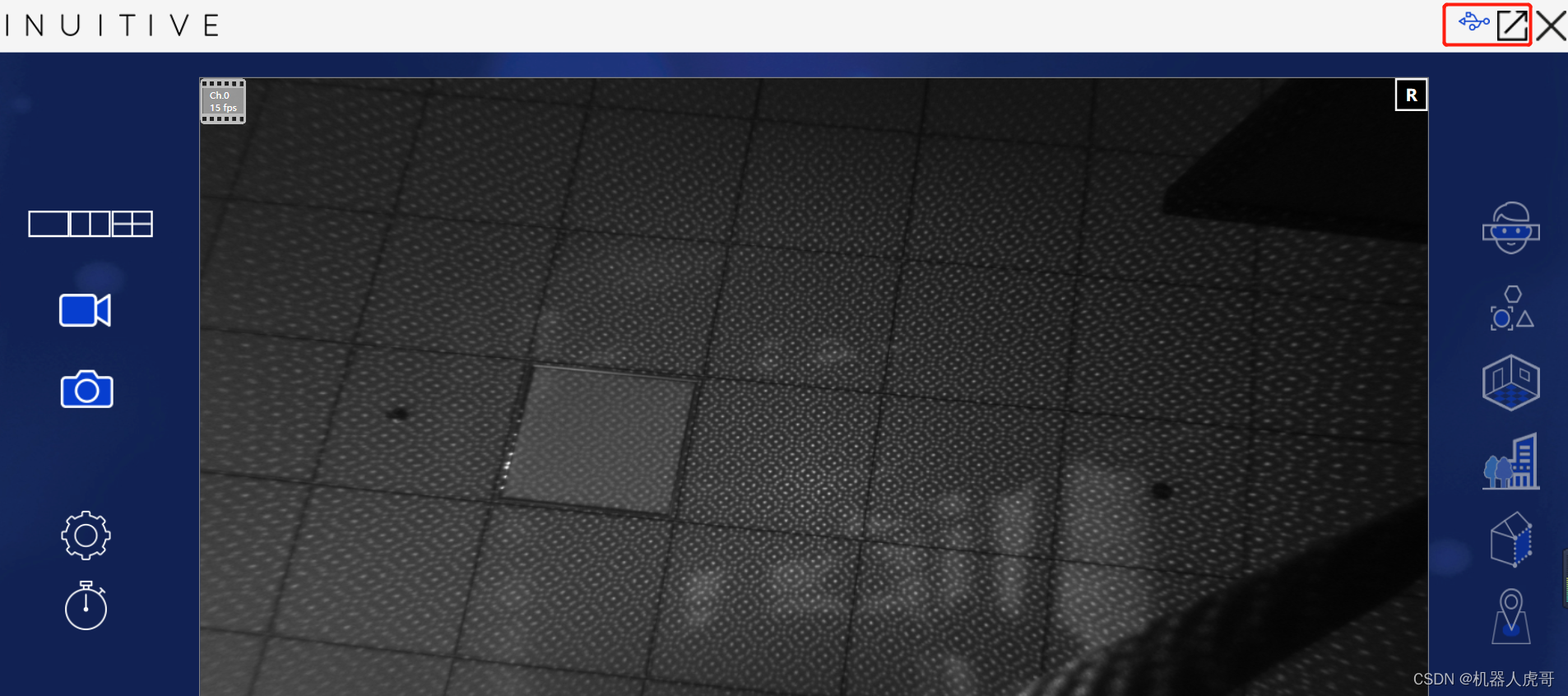
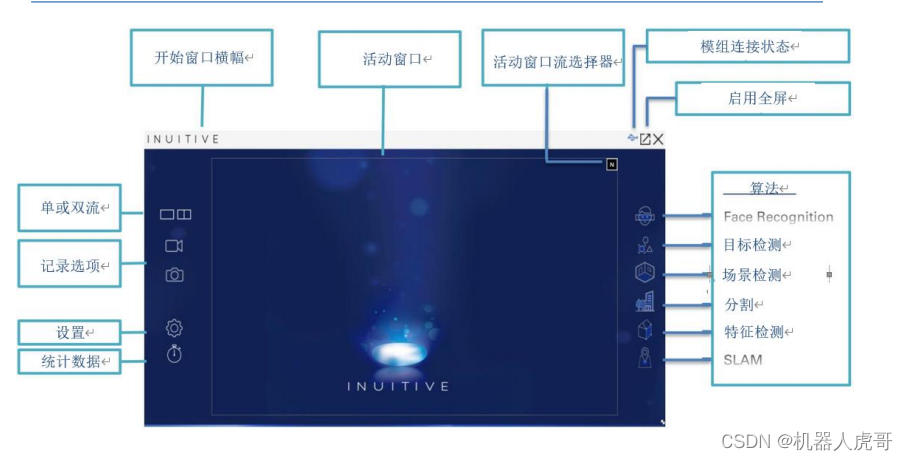
验证位于窗口右上角的USB连接器图标是否为蓝色。
-
蓝色USB图标:模组已连接并正在运行
-
灰色USB图标:模组未连接或未激活
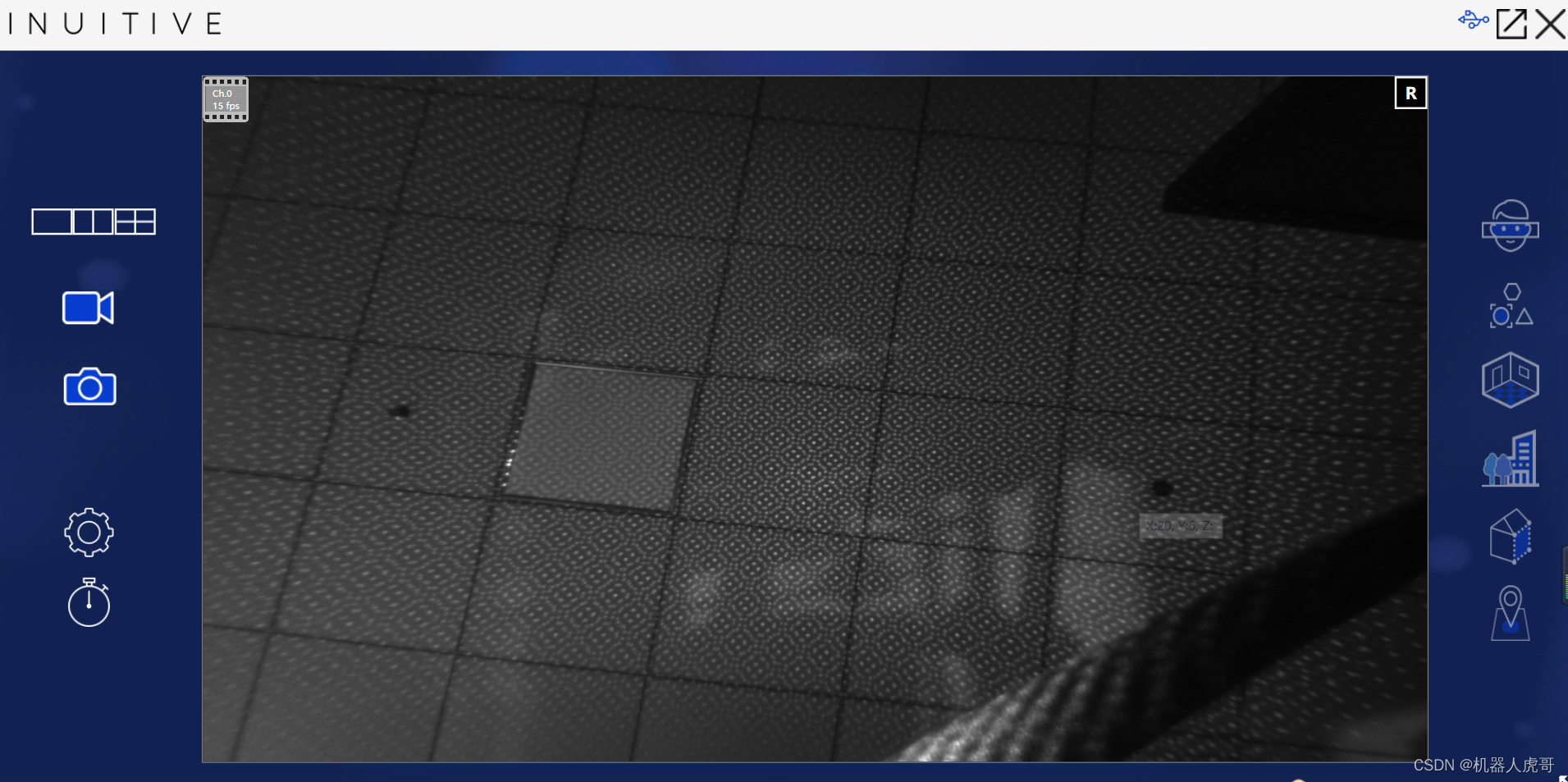
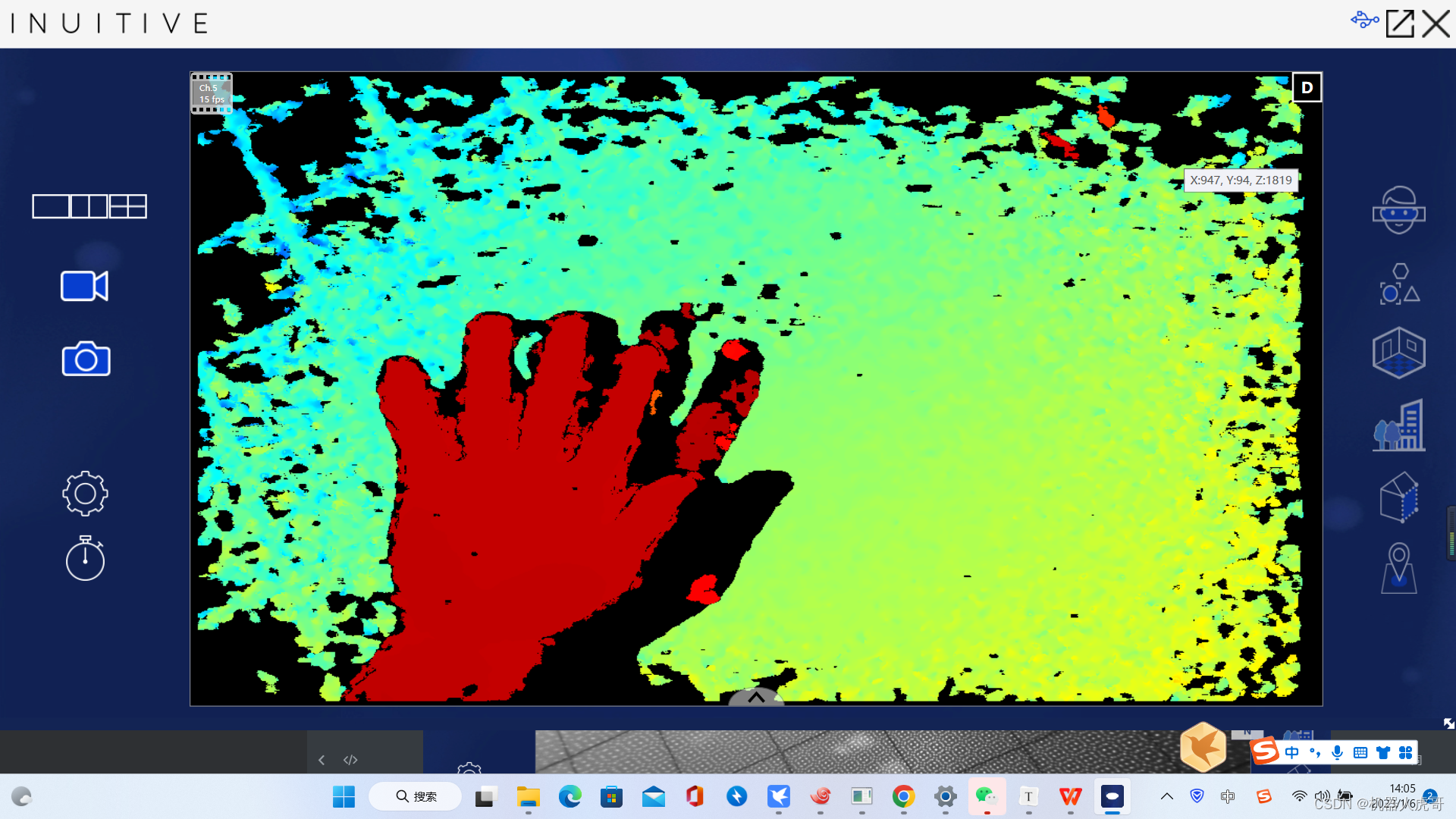
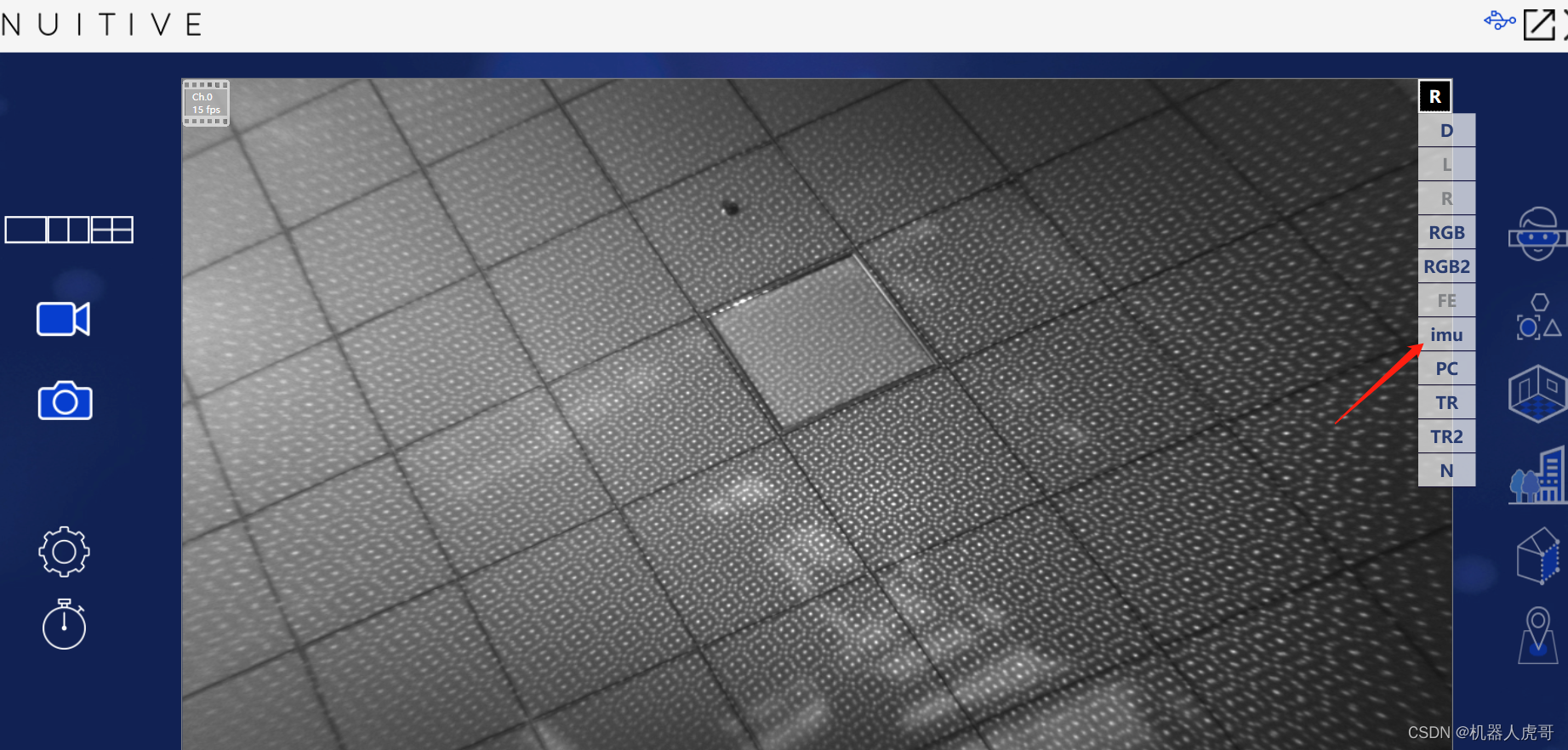
默认显示红外数据,我们通过活动窗口流选择可以显示不同通道的数据:
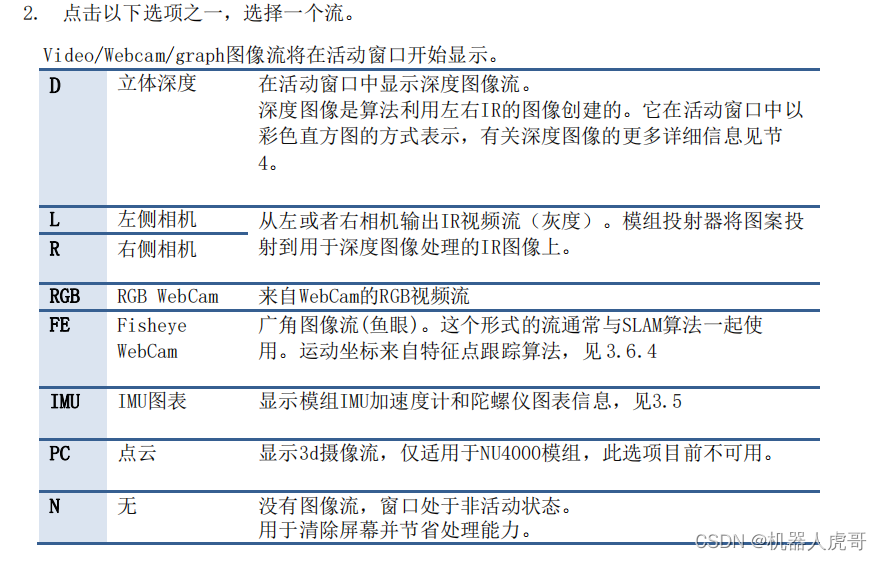
1、活动流选择显示深度数据:
2、活动流选择显示RGB数据:
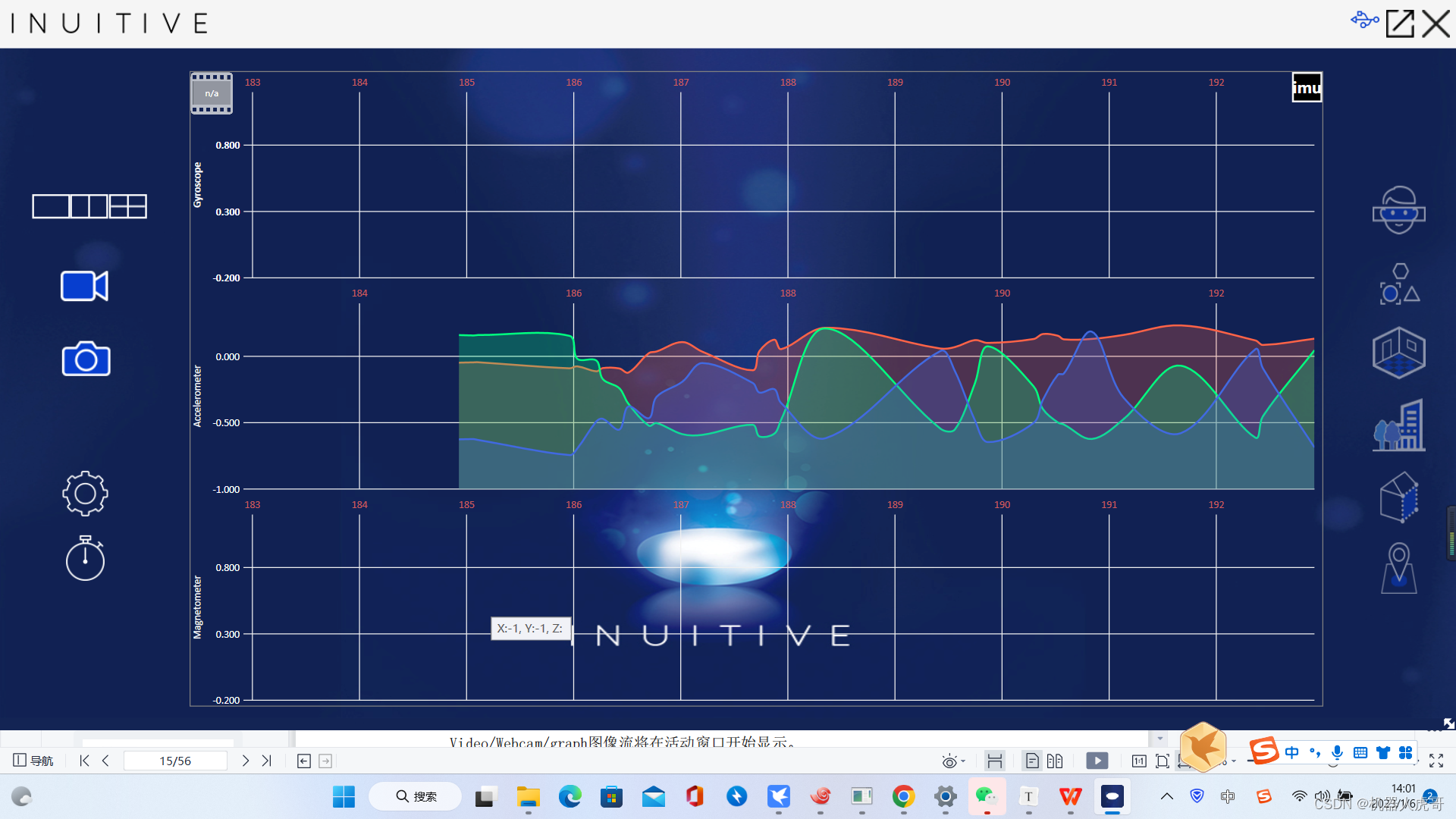
3、活动流选择显示IMU数据:
三、ROS 下测试流程
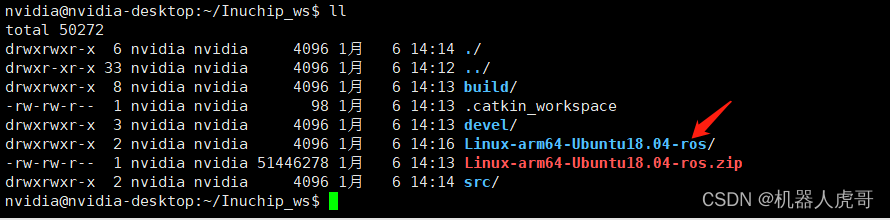
4.1 拷贝代码
#解压包
unzip Linux-arm64-Ubuntu18.04-ros.zip
官方目录中有安装步骤,要先执行了:

#插入模组:
1,sudo dpkg -i inudev-simplified_4.16.0006.30_arm64.deb
2,sudo dpkg -i ros-melodic-inudev-ros-nodelet_1.0.18-0bionic_arm64.deb
3,export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/opt/Inuitive/InuDev/lib
4,roslaunch /opt/ros/melodic/share/inudev_ros_nodelet/launch/inudev_ros_nodelet.launch
4.2 插入模组USB至板子

4.3 安装官方程序
cd ~/Inuchip_ws/Linux-arm64-Ubuntu18.04-ros
sudo dpkg -i inudev-simplified_4.16.0006.30_arm64.deb

sudo dpkg -i ros-melodic-inudev-ros-nodelet_1.0.18-0bionic_arm64.deb

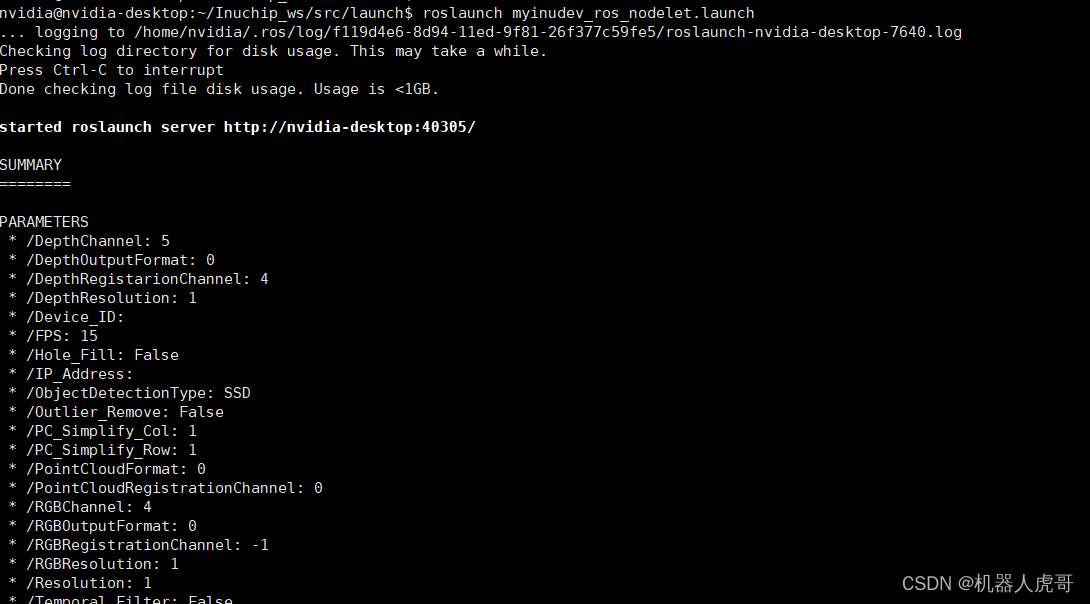
4.4 测试启动
需要显示器界面支持,我使用nomachine 链接我的板子的。
#设置库应用路径
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/opt/Inuitive/InuDev/lib
#启动传感器测试驱动
roslaunch /opt/ros/melodic/share/inudev_ros_nodelet/launch/inudev_ros_nodelet.launch
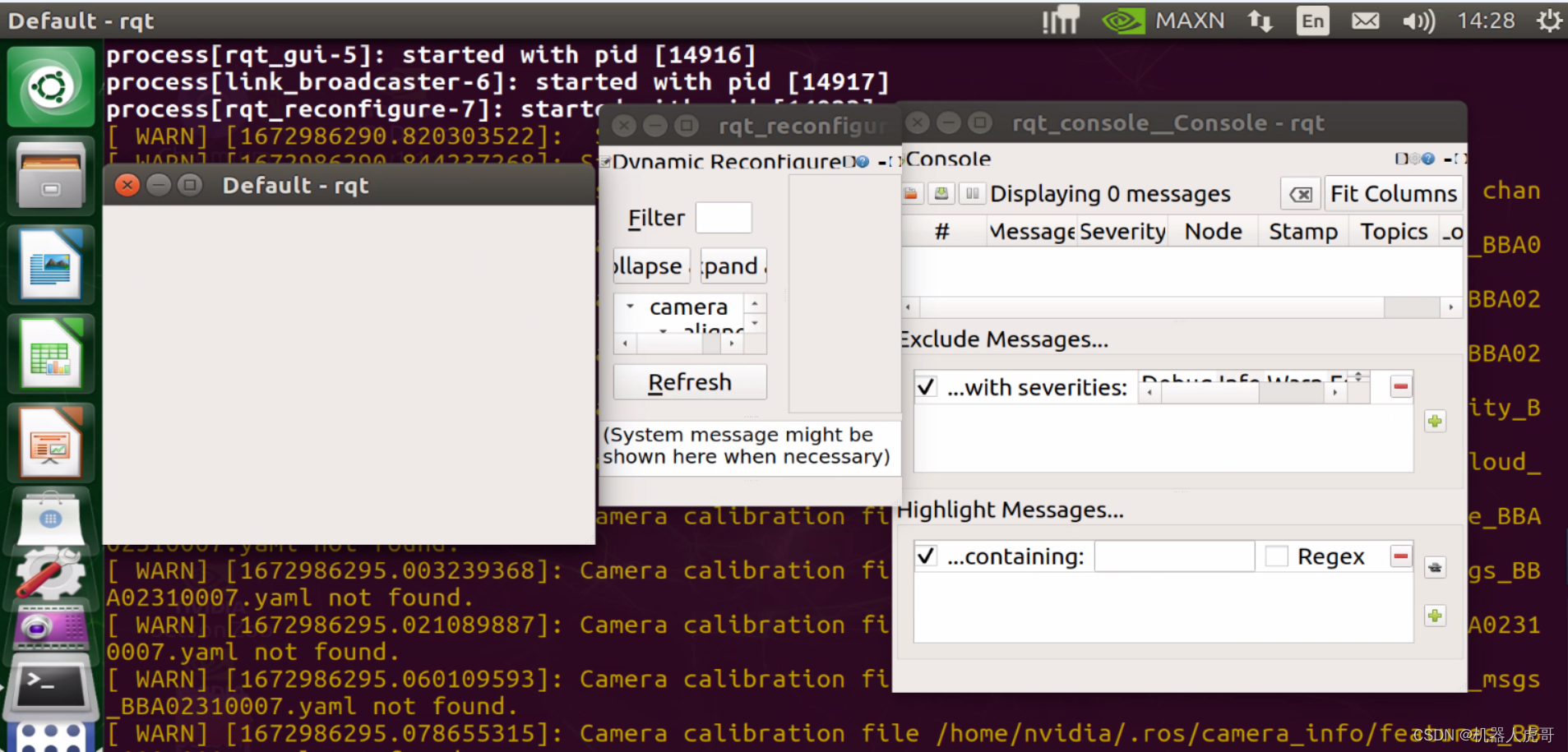
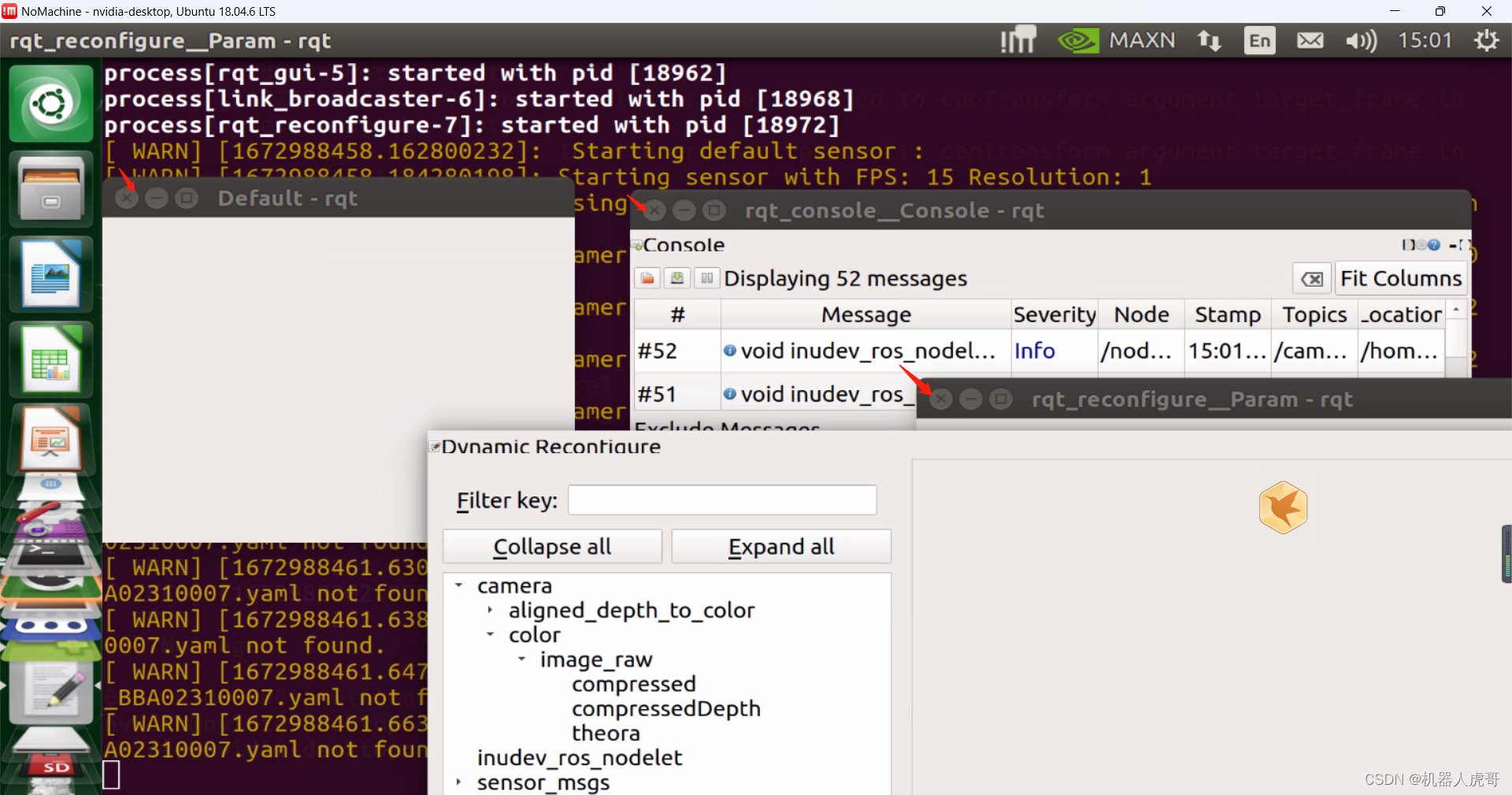
启动之后,会弹出3个窗口,这个应该是官方为了方便测试所留的。可以全部3个窗口都关掉,不影响后续测试。
这个页面,官方预留的可以用来可视化调整一些参数看。可以全部3个窗口都关掉,不影响后续测试。
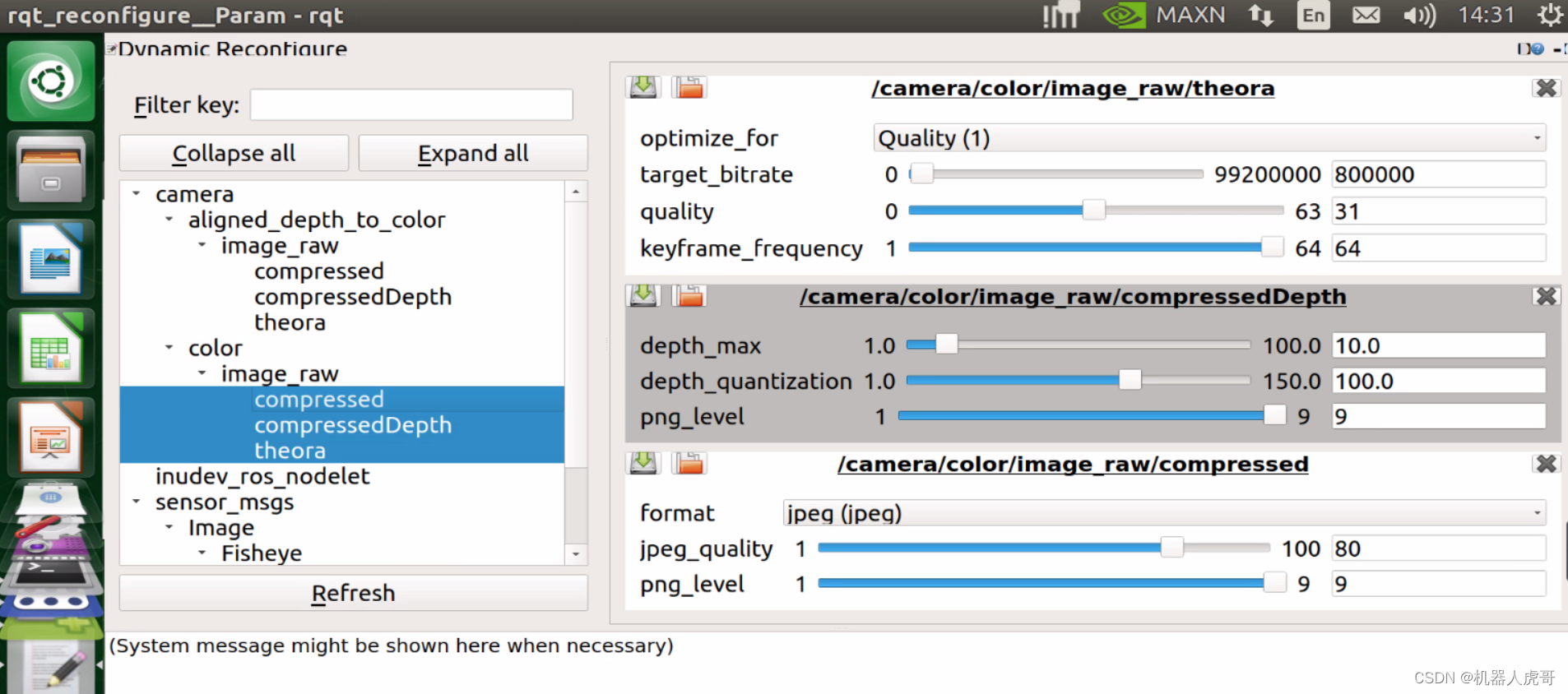
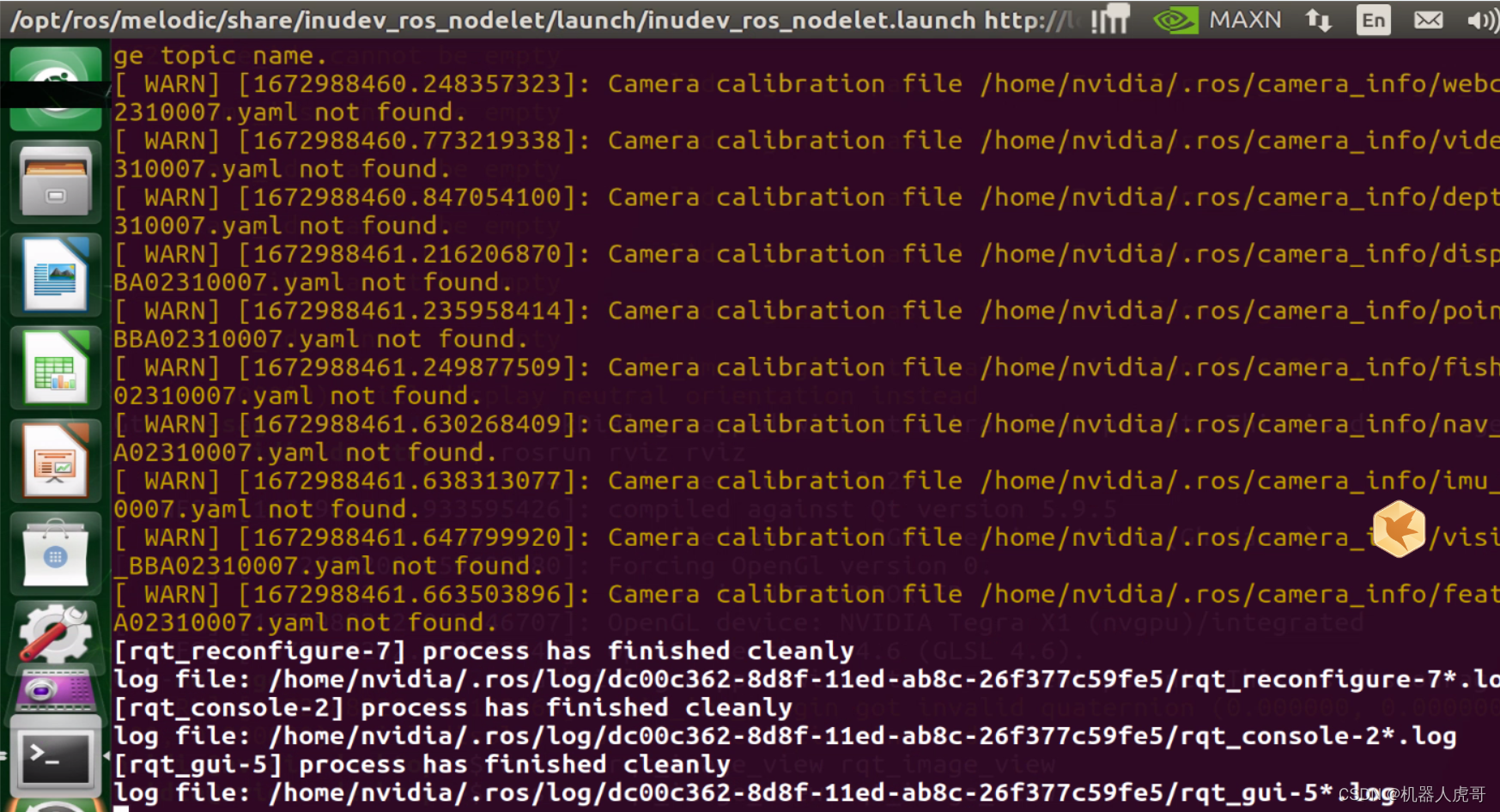 关掉不影响后续测试。
关掉不影响后续测试。
新开一个终端:
rosnode list
/inudev_ros_nodelet
/link_broadcaster
/nodelet_manager
/rosout
/rqt_console
/rqt_reconfigure
rostopic list
/camera/aligned_depth_to_color/image_raw
/camera/aligned_depth_to_color/image_raw/compressed
/camera/aligned_depth_to_color/image_raw/compressed/parameter_descriptions
/camera/aligned_depth_to_color/image_raw/compressed/parameter_updates
/camera/aligned_depth_to_color/image_raw/compressedDepth
/camera/aligned_depth_to_color/image_raw/compressedDepth/parameter_descriptions
/camera/aligned_depth_to_color/image_raw/compressedDepth/parameter_updates
/camera/aligned_depth_to_color/image_raw/theora
/camera/aligned_depth_to_color/image_raw/theora/parameter_descriptions
/camera/aligned_depth_to_color/image_raw/theora/parameter_updates
/camera/color/camera_info
/camera/color/image_raw
/camera/color/image_raw/compressed
/camera/color/image_raw/compressed/parameter_descriptions
/camera/color/image_raw/compressed/parameter_updates
/camera/color/image_raw/compressedDepth
/camera/color/image_raw/compressedDepth/parameter_descriptions
/camera/color/image_raw/compressedDepth/parameter_updates
/camera/color/image_raw/theora
/camera/color/image_raw/theora/parameter_descriptions
/camera/color/image_raw/theora/parameter_updates
/depth/depth2pc
/disparity/sensor_msgs/Image/Video/disparity
/features/camera/fisheye/features
/imu/sensor_msgs/Imu
/inudev_ros_nodelet/parameter_descriptions
/inudev_ros_nodelet/parameter_updates
/nav_msgs/sensor_msgs/Path
/nodelet_manager/bond
/pointcloud/sensor/PointCloud2
/rosout
/rosout_agg
/sensor_msgs/Image/Fisheye
/sensor_msgs/Image/Fisheye/compressed
/sensor_msgs/Image/Fisheye/compressed/parameter_descriptions
/sensor_msgs/Image/Fisheye/compressed/parameter_updates
/sensor_msgs/Image/Fisheye/compressedDepth
/sensor_msgs/Image/Fisheye/compressedDepth/parameter_descriptions
/sensor_msgs/Image/Fisheye/compressedDepth/parameter_updates
/sensor_msgs/Image/Fisheye/theora
/sensor_msgs/Image/Fisheye/theora/parameter_descriptions
/sensor_msgs/Image/Fisheye/theora/parameter_updates
/sensor_msgs/Image/Video/left/camera_info
/sensor_msgs/Image/Video/left/image
/sensor_msgs/Image/Video/right/camera_info
/sensor_msgs/Image/Video/right/image
/sensor_msgs/Image/camera_info
/tf
/vision_msgs/vision_msgs/Detections
4.5 RVIZ 显示IMU数据
# 如果刚才没有关相机节点,下面可以跳过,如果已经关闭,记得开一个终端,打开相机节点
#设置库应用路径
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/opt/Inuitive/InuDev/lib
#启动传感器测试驱动
roslaunch /opt/ros/melodic/share/inudev_ros_nodelet/launch/inudev_ros_nodelet.launch
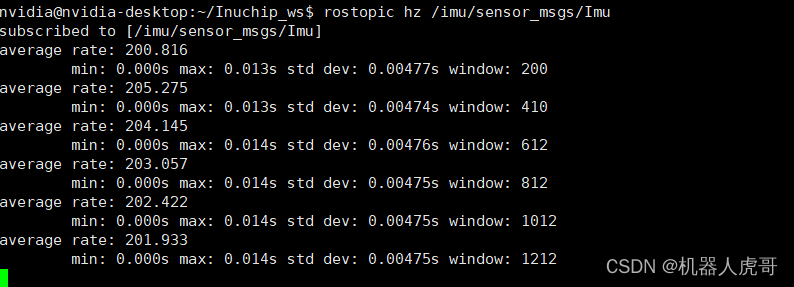
在一个新的终端,可以看到IMU话题和数据
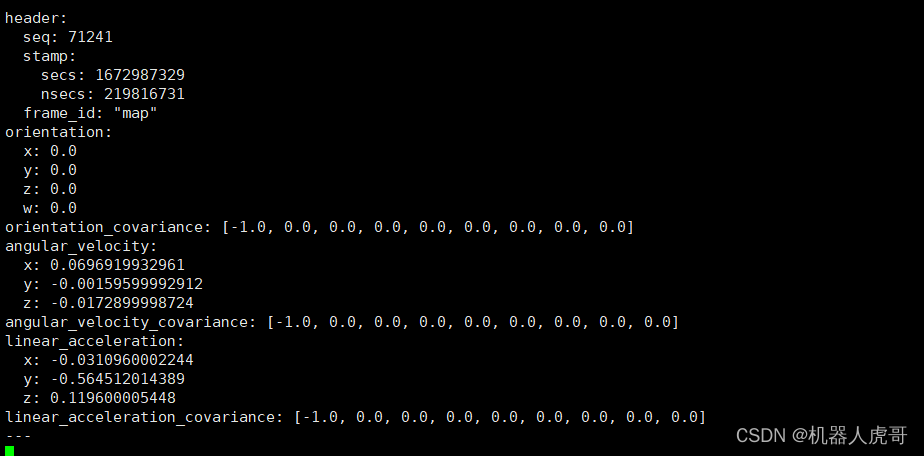
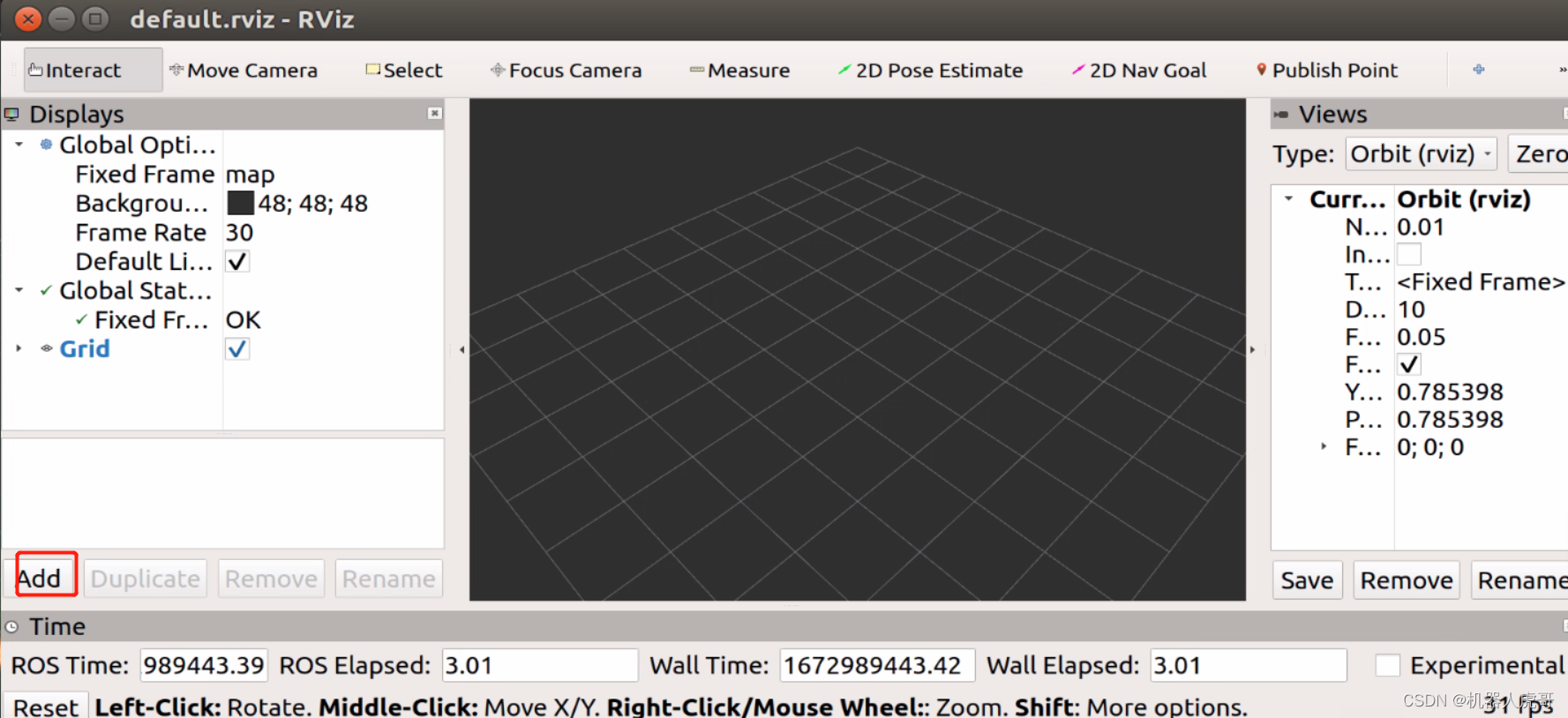
# 新开一个节点,打开RVIZ
rosrun rviz rviz
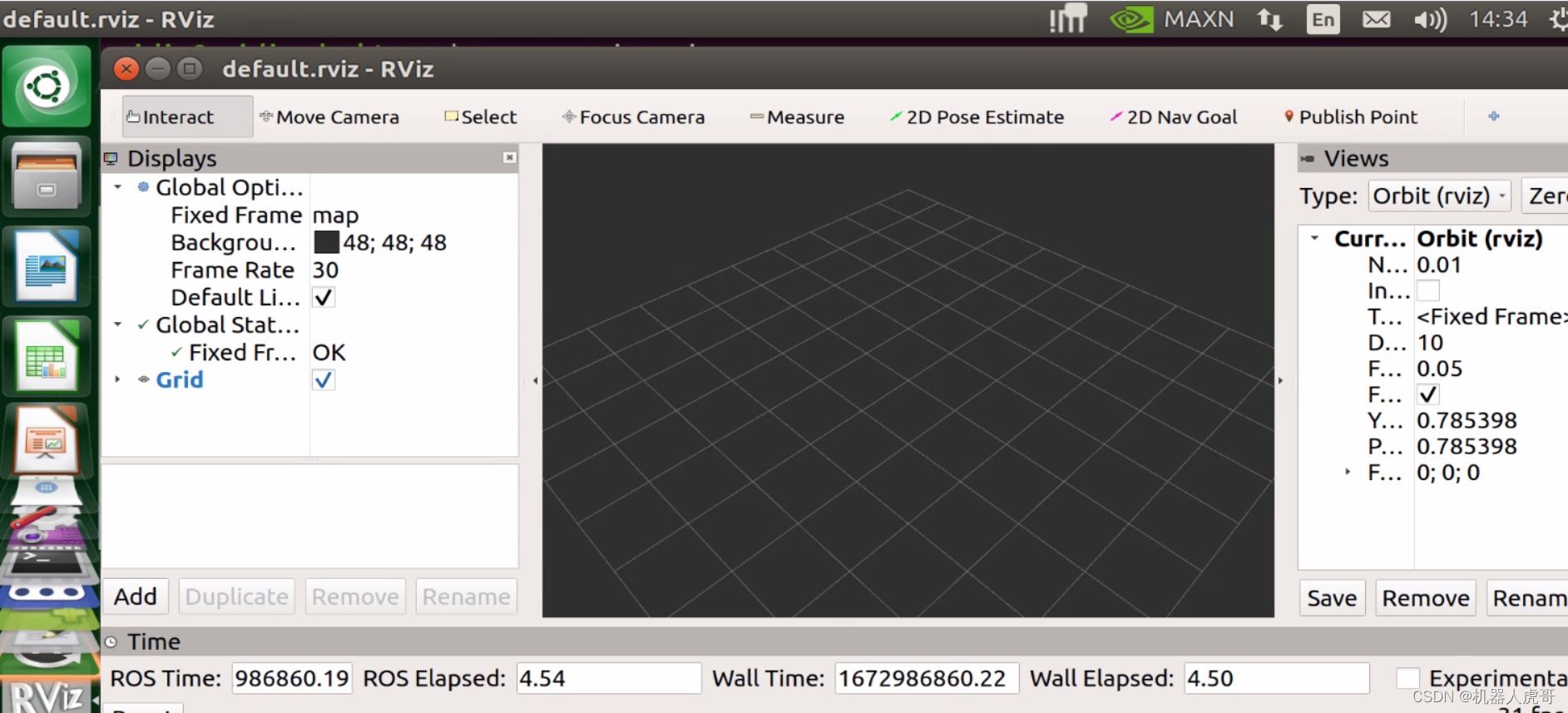
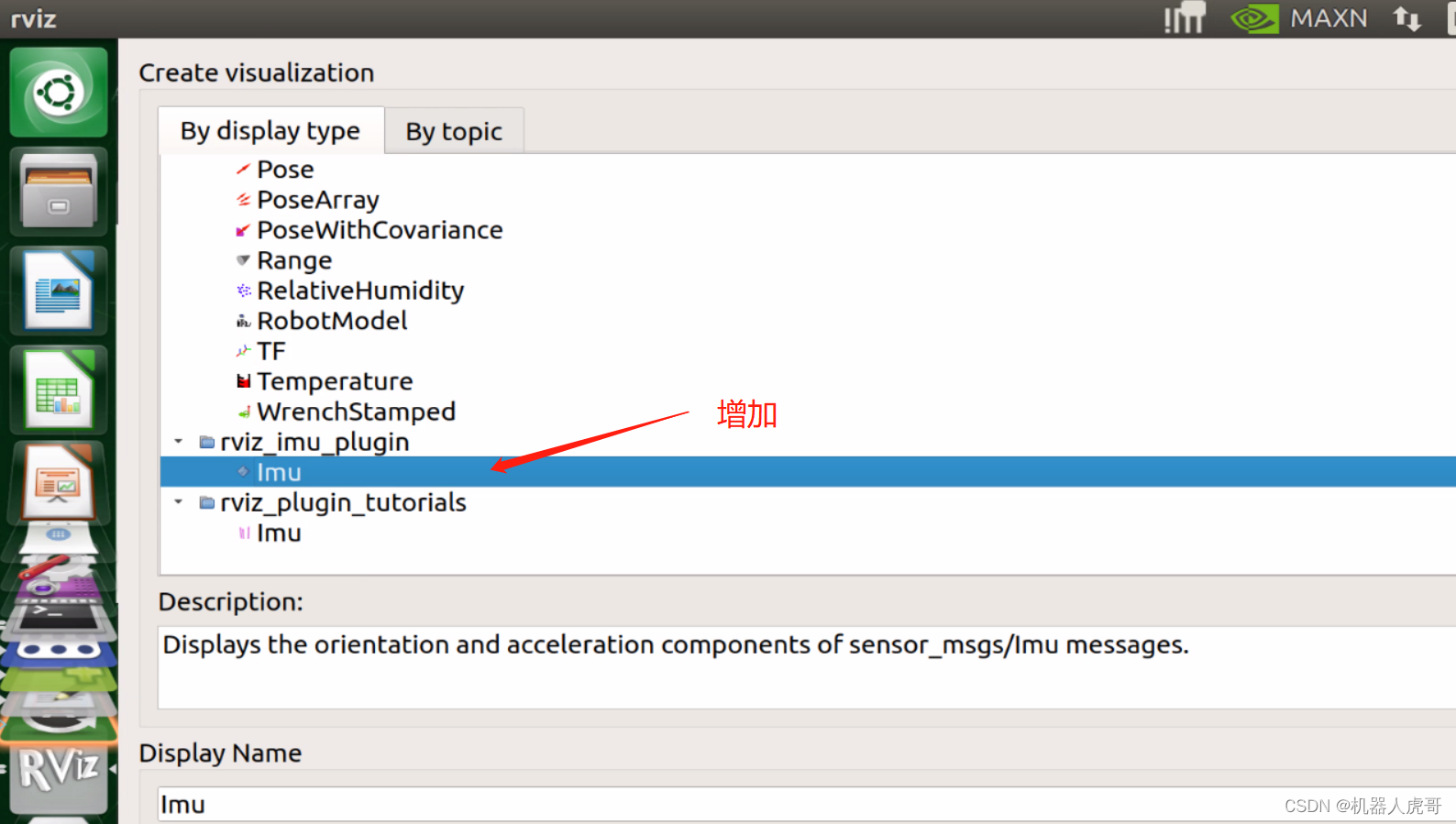
Rviz中点击左下角Add添加rviz_imu_plugin,可以看见有坐标系出现,如果没有需要安装 (sudo apt-get install ros-melodic-imu-tools 安装imu功能包)
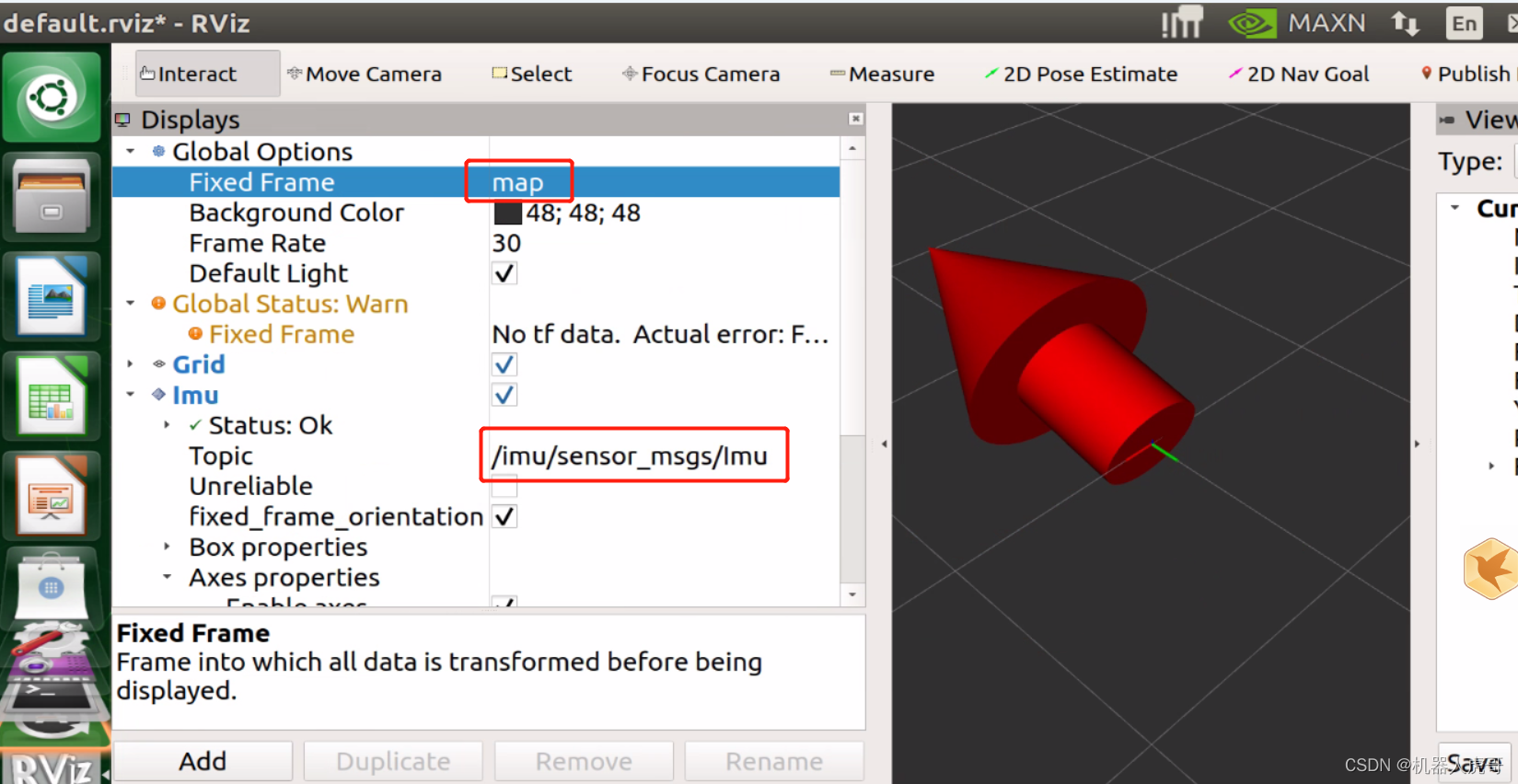
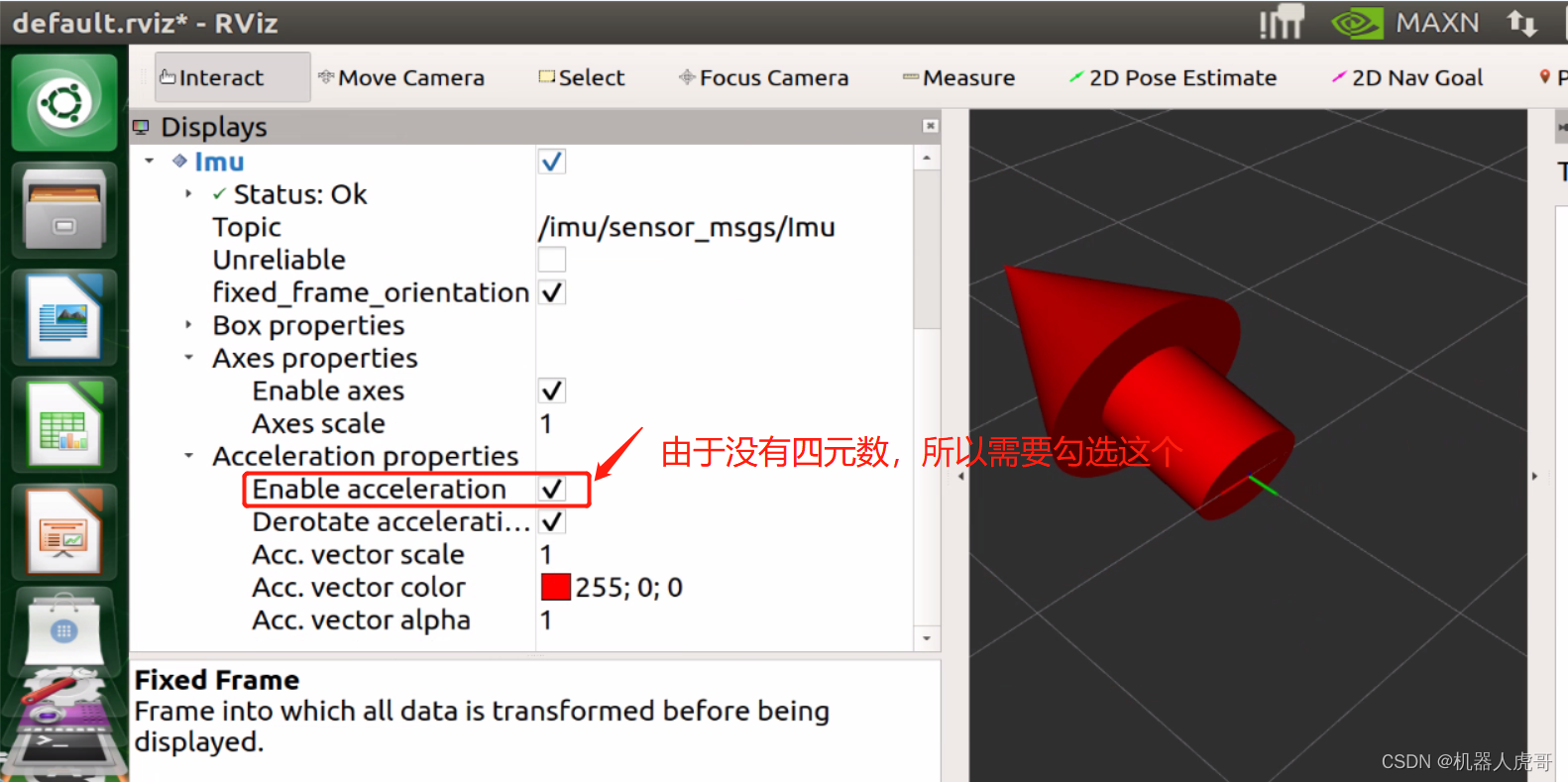
这个时候你再动相机,圆锥箭头就开始动了。
可以保留这个RVIZ配置:
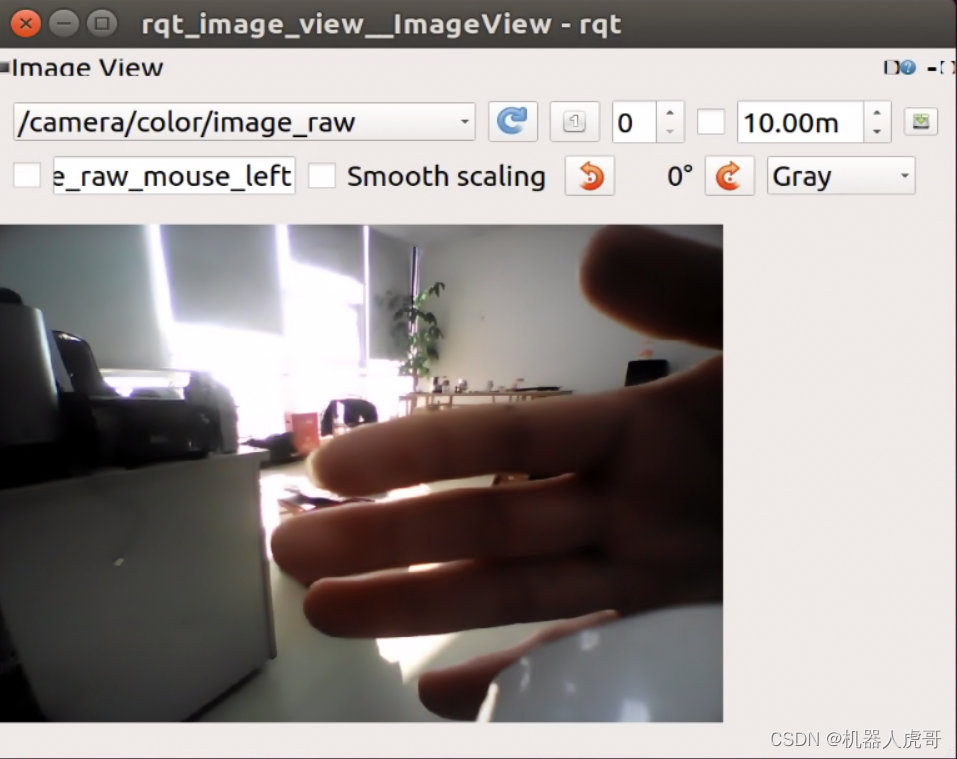
4.6 rqt_image_view RGB、红外、深度图
上面已经打开了测试节点,此处行开一个终端,启动rqt_image_view
rosrun rqt_image_view rqt_image_view
RGB图:
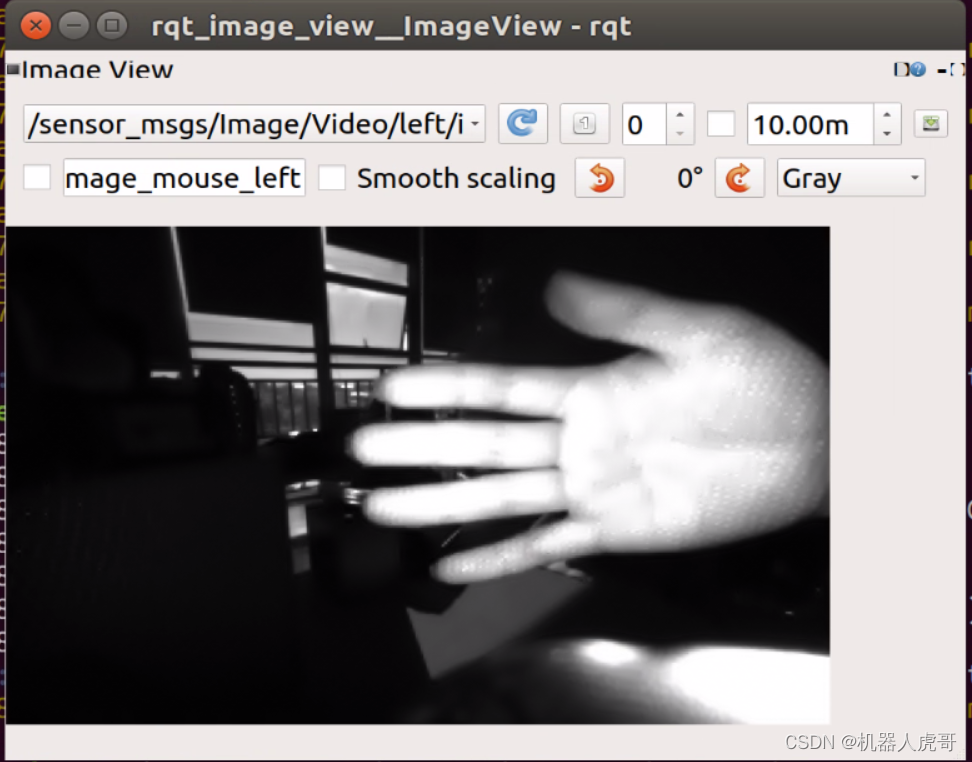
红外图:
一看深度信息图,就会报错:
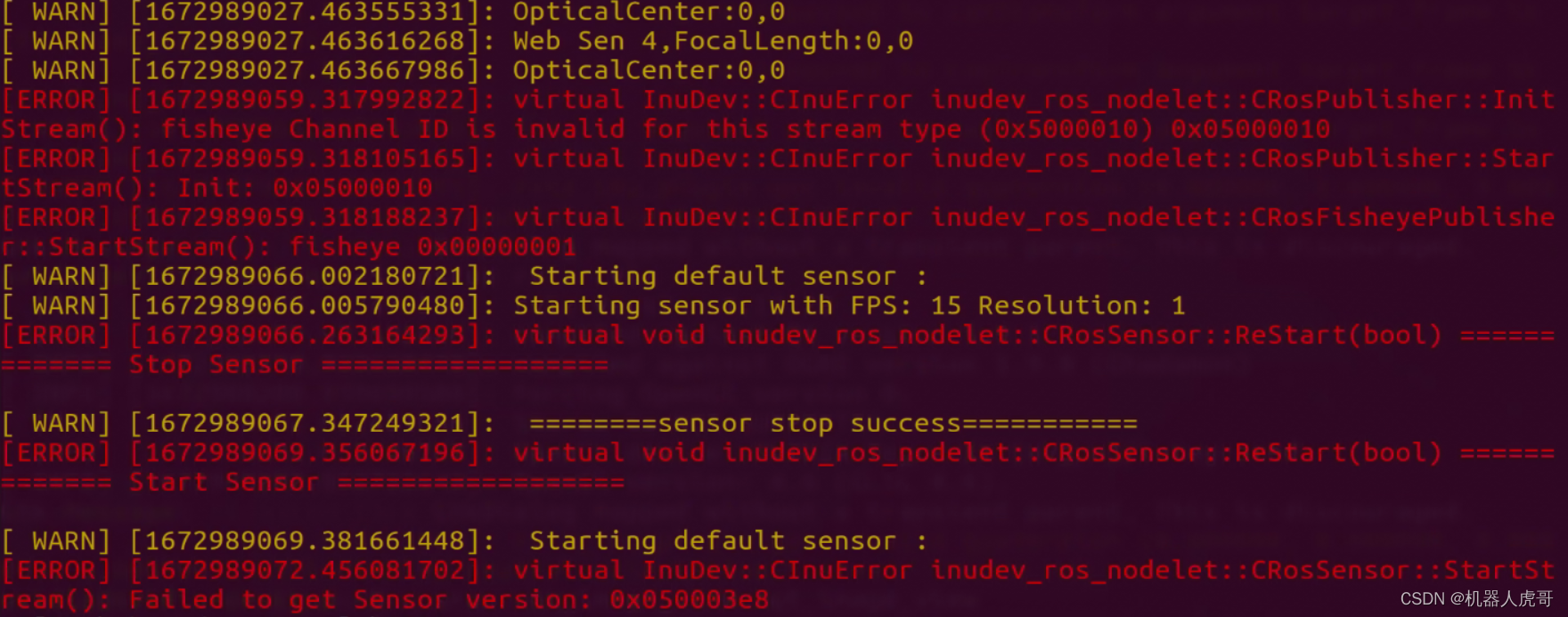
暂时没有搞清楚怎么回事。
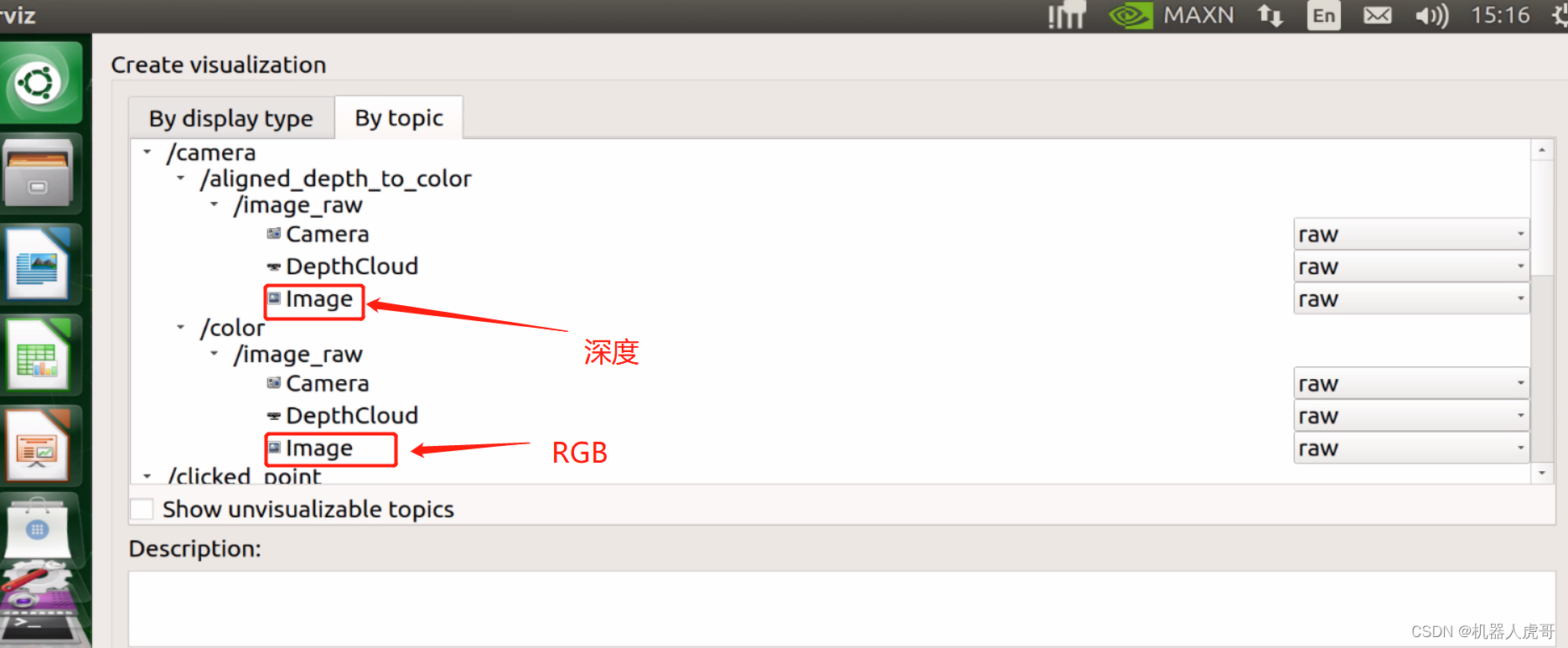
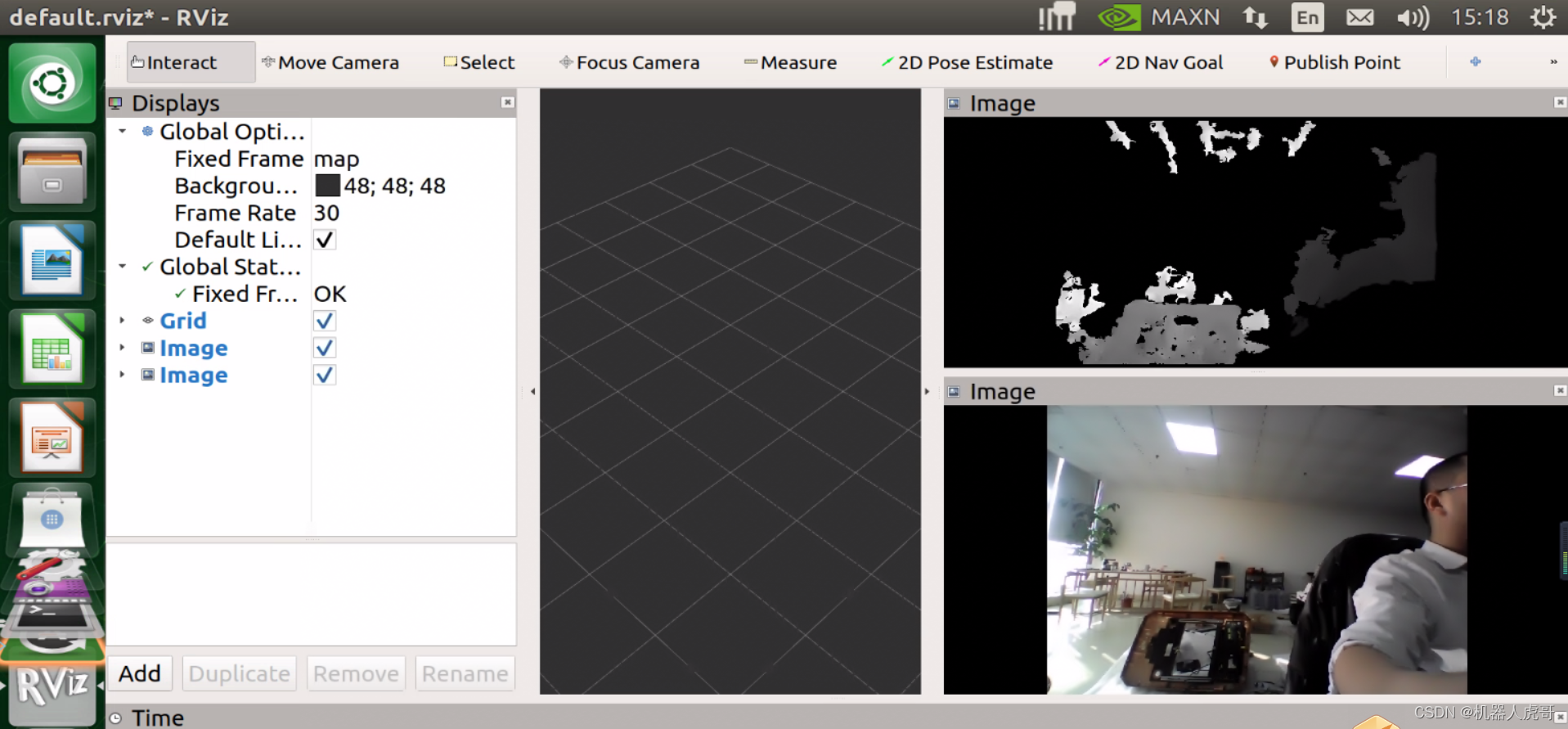
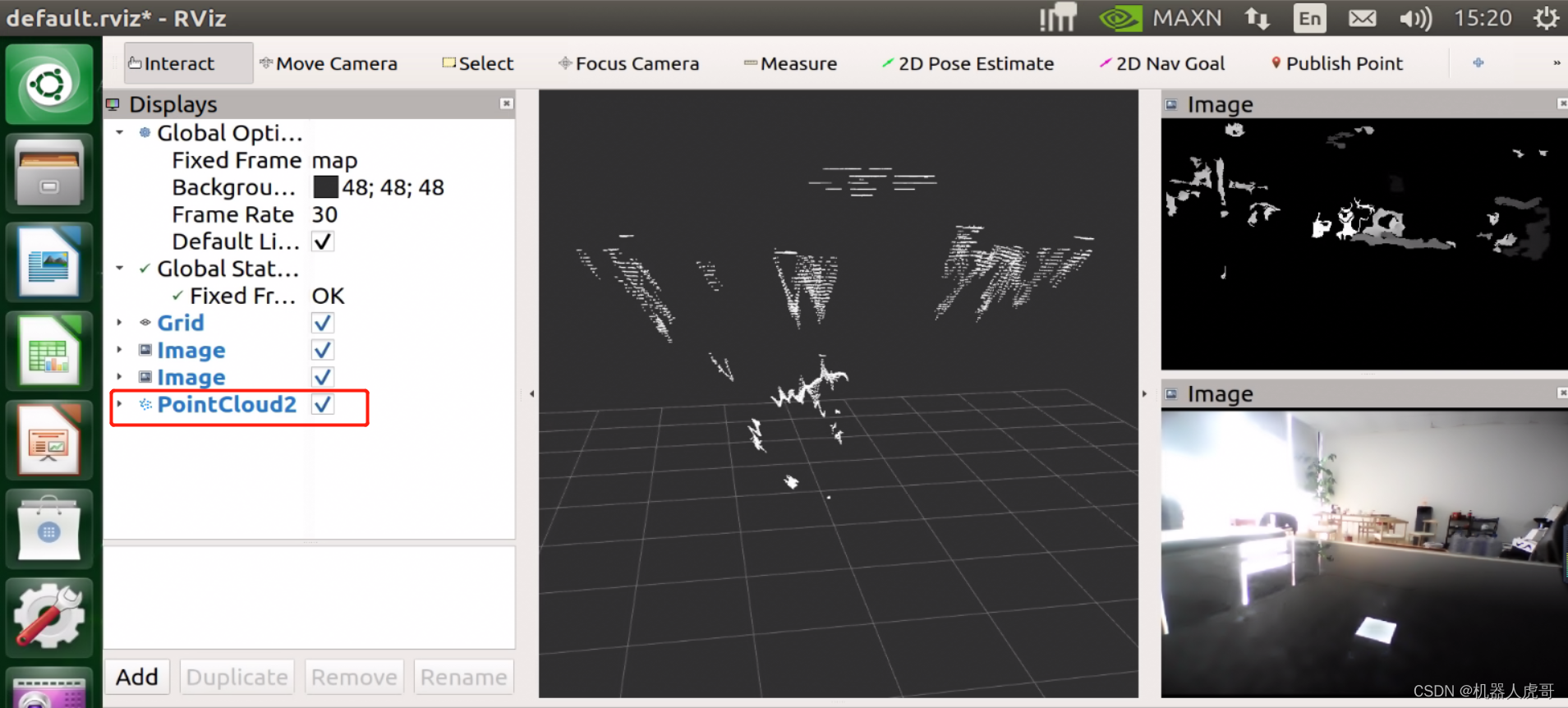
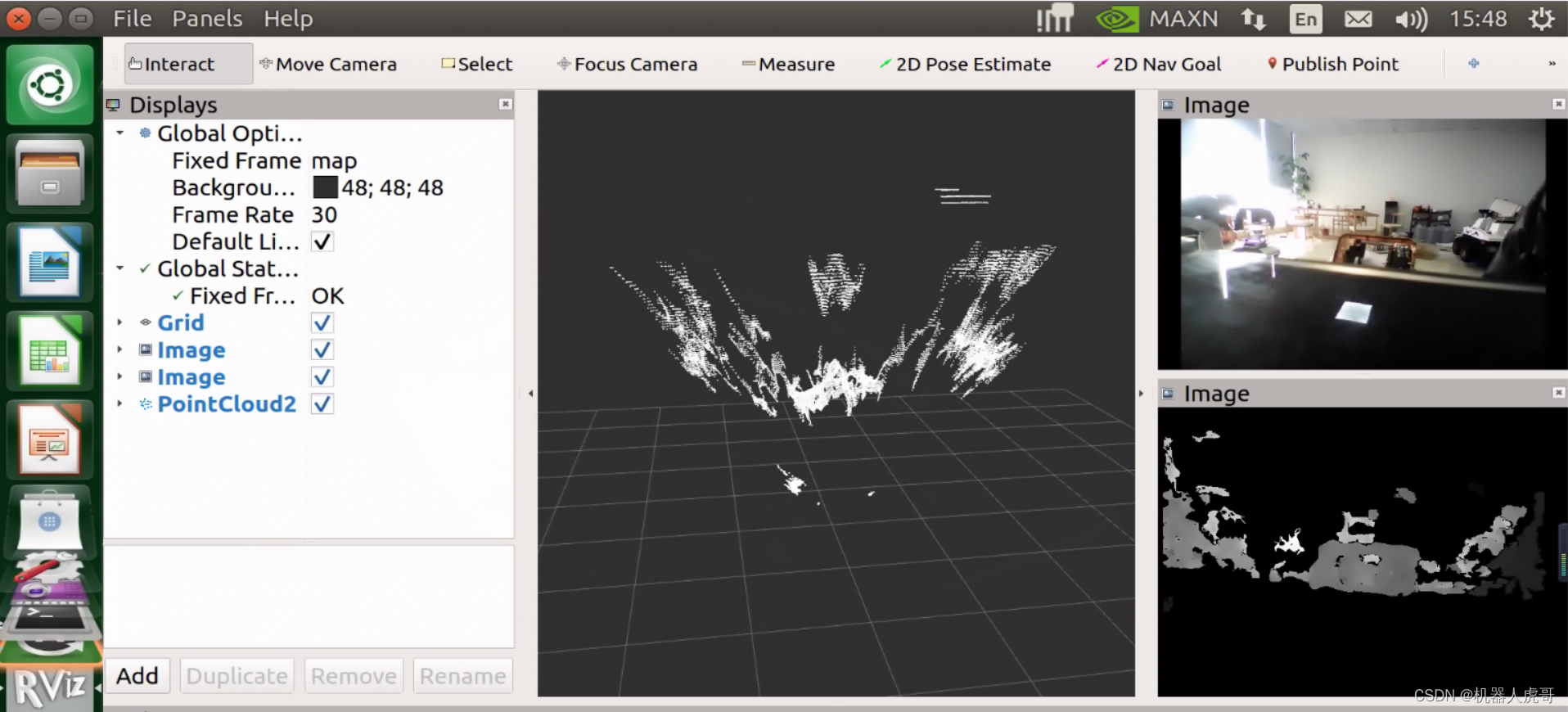
4.7 RVIZ RGB、红外、深度图
# 如果刚才没有关相机节点,下面可以跳过,如果已经关闭,记得开一个终端,打开相机节点
#设置库应用路径
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/opt/Inuitive/InuDev/lib
#启动传感器测试驱动
roslaunch /opt/ros/melodic/share/inudev_ros_nodelet/launch/inudev_ros_nodelet.launch
# 新开一个节点,打开RVIZ
rosrun rviz rviz
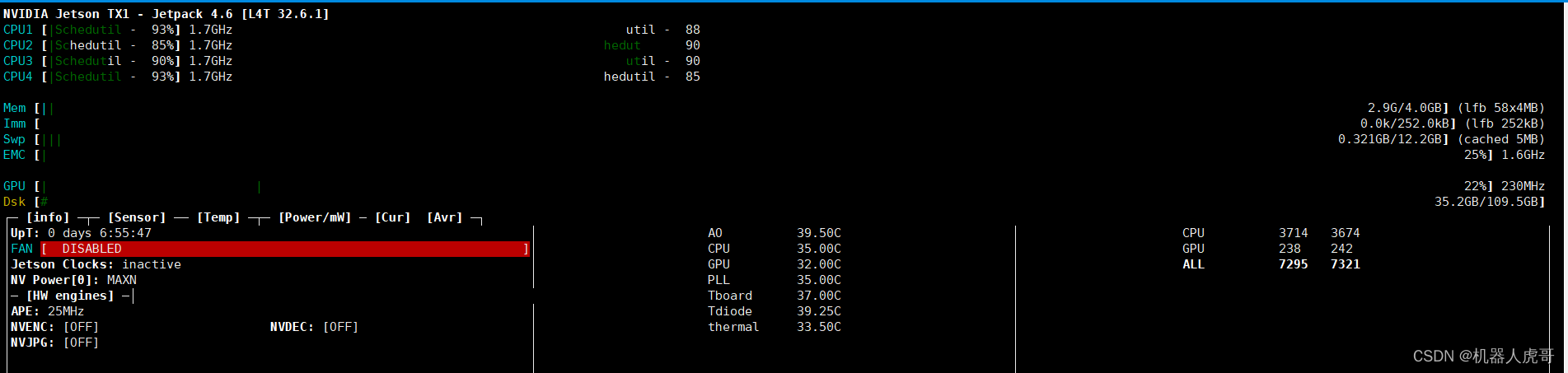
测试过程中记录了一下CPU的占用情况
四. 只启动相机驱动的LAUNCH修改
每次启动官方的脚本文件,都需要进行关闭那些窗口的操作,实际我们使用,应该也很少开启那些窗口,我们可以选择自己写一个脚本本间来实现。
#启动传感器测试驱动
roslaunch /opt/ros/melodic/share/inudev_ros_nodelet/launch/inudev_ros_nodelet.launch
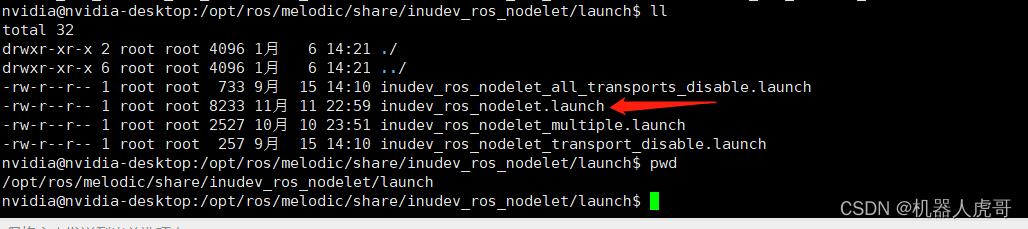
launch/inudev_ros_nodelet.launch 文件的原始内容:
<launch>
<arg name="Service_ID" default="" />
<arg name="tf_prefix" default="" />
<arg name="stereo_namespace" default="stereo" />
<arg name="xyz_namespace" default="cloudify" />
<arg name="manager" default="nodelet_manager" />
<!-- "screen" or "log" -->
<arg name="output" default="log" />
<arg name="verbose" default="true" />
<arg name="run_stereo_image_proc" default="0" />
<arg name="run_disparity_to_depth" default="0" />
<!-- controls display of InuSW vide/disparity output -->
<arg name="run_image_view_video" default="0" />
<!-- controls display of ROS video->disparity processing display -->
<arg name="run_image_view_disparity" default="0" />
<arg name="run_image_view_depth" default="0" />
<arg name="run_image_view_fisheye" default="0" />
<arg name="run_image_view_RGB" default="0" />
<arg name="run_rqt_image_view" default="0" />
<arg name="run_rviz" default="0" />
<arg name="run_depth2xyz" default="0" />
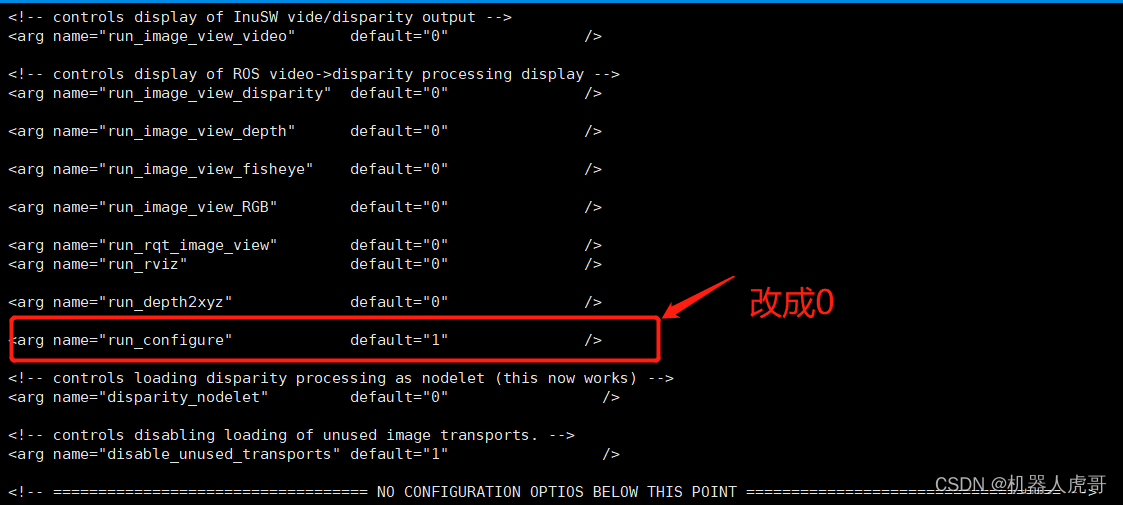
<arg name="run_configure" default="1" />
<!-- controls loading disparity processing as nodelet (this now works) -->
<arg name="disparity_nodelet" default="0" />
<!-- controls disabling loading of unused image transports. -->
<arg name="disable_unused_transports" default="1" />
<!-- =================================== NO CONFIGURATION OPTIOS BELOW THIS POINT =================================== -->
<rosparam file="$(find inudev_ros_nodelet)/cfg/InuRosParams$(arg Service_ID).yaml" />
<!-- Topic remapping according to service ID -->
<remap from="/camera/aligned_depth_to_color/image_raw" to="/camera/aligned_depth_to_color/image_raw$(arg Service_ID)" />
<remap from="/camera/color/image_raw" to="/camera/color/image_raw$(arg Service_ID)" />
<remap from="/sensor_msgs/Image/Video/right/image" to="/sensor_msgs/Image/Video/right/image$(arg Service_ID)" />
<remap from="/sensor_msgs/Image/Video/left/image" to="/sensor_msgs/Image/Video/left/image$(arg Service_ID)" />
<remap from="/sensor_msgs/Image/Video/disparity" to="/sensor_msgs/Image/Video/disparity2$(arg Service_ID)" />
<remap from="/sensor/PointCloud" to="/sensor/PointCloud$(arg Service_ID)" />
<remap from="/sensor_msgs/Image/Fisheye" to="/sensor_msgs/Image/Fisheye$(arg Service_ID)" />
<remap from="/sensor_msgs/Path" to="/sensor_msgs/Path$(arg Service_ID)" />
<remap from="/sensor_msgs/Imu" to="/sensor_msgs/Imu$(arg Service_ID)" />
<remap from="/vision_msgs/Detections" to="/vision_msgs/Detections$(arg Service_ID)" />
<remap from="/camera/fisheye/features" to="/camera/fisheye/features$(arg Service_ID)" />
<group if="$(arg disable_unused_transports)" >
<include file="$(find inudev_ros_nodelet)/launch/inudev_ros_nodelet_transport_disable.launch" ns="sensor_msgs/Image/Depth" />
<include file="$(find inudev_ros_nodelet)/launch/inudev_ros_nodelet_transport_disable.launch" ns="sensor_msgs/Image/Webcam" />
<include file="$(find inudev_ros_nodelet)/launch/inudev_ros_nodelet_all_transports_disable.launch" >
<arg name="side" value="left" />
</include>
<include file="$(find inudev_ros_nodelet)/launch/inudev_ros_nodelet_all_transports_disable.launch" >
<arg name="side" value="right" />
</include>
</group>
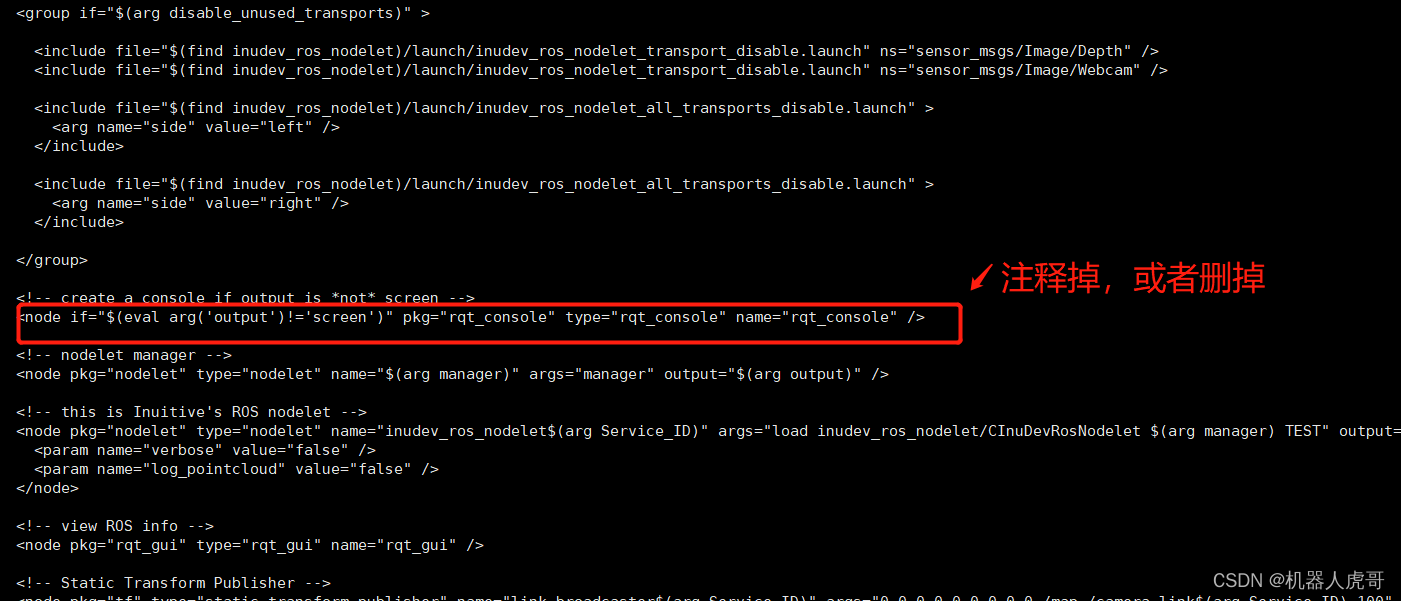
<!-- create a console if output is *not* screen -->
<node if="$(eval arg('output')!='screen')" pkg="rqt_console" type="rqt_console" name="rqt_console" />
<!-- nodelet manager -->
<node pkg="nodelet" type="nodelet" name="$(arg manager)" args="manager" output="$(arg output)" />
<!-- this is Inuitive's ROS nodelet -->
<node pkg="nodelet" type="nodelet" name="inudev_ros_nodelet$(arg Service_ID)" args="load inudev_ros_nodelet/CInuDevRosNodelet $(arg manager) TEST" output="$(arg output)" required="true">
<param name="verbose" value="false" />
<param name="log_pointcloud" value="false" />
</node>
<!-- view ROS info -->
<node pkg="rqt_gui" type="rqt_gui" name="rqt_gui" />
<!-- Static Transform Publisher -->
<node pkg="tf" type="static_transform_publisher" name="link_broadcaster$(arg Service_ID)" args="0.0 0.0 0.0 0 0 0 /map /camera_link$(arg Service_ID) 100" />
<node if="$(arg run_rqt_image_view)" pkg="rqt_image_view" type="rqt_image_view" name="rqt_image_view" output="$(arg output)" />
<!-- display InuSW disparity output -->
<node if="$(arg run_image_view_video)" pkg="image_view" type="stereo_view" name="image_view" args="_approximate_sync:=True" output="$(arg output)">
<param name="~window_name" value="Video" />
<remap from="stereo" to="/sensor_msgs/Image/Video" />
<param name="queue_size" value="5" />
</node>
<!-- Display of ROS video->disparity processing output -->
<node if="$(arg run_image_view_disparity)" pkg="image_view" type="stereo_view" name="disparity_view" output="$(arg output)">
<param name="~window_name" value="Disparity" />
<remap from="stereo" to="$(arg stereo_namespace)" />
<remap from="image" to="image_color" />
</node>
<node if="$(arg run_image_view_depth)" pkg="image_view" type="image_view" name="depth_view" respawn="true" respawn_delay="30" output="$(arg output)">
<param name="~window_name" value="Depth" />
<remap from="image" to="/sensor_msgs/Image/Depth" />
</node>
<node if="$(arg run_image_view_fisheye)" pkg="image_view" type="image_view" name="fisheye_view" respawn="true" respawn_delay="30" output="$(arg output)">
<param name="~window_name" value="Fisheye" />
<remap from="image" to="/sensor_msgs/Image/Fisheye" />
</node>
<node if="$(arg run_image_view_RGB)" pkg="image_view" type="image_view" name="RGB_view" respawn="true" respawn_delay="30" output="$(arg output)">
<param name="~window_name" value="RGB" />
<remap from="image" to="/camera/color/image_raw" />
</node>
<node if="$(arg run_depth2xyz)" pkg="nodelet" type="nodelet" name="cloudify" args="load depth_image_proc/point_cloud_xyz $(arg manager)" output="$(arg output)">
<remap from="sensor_msgs/Image" to="/sensor_msgs/Image/Depth" />
<remap from="sensor_msgs/CameraInfo" to="/sensor_msgs/Image/camera_info" />
</node>
<node if="$(arg run_rviz)" pkg="rviz" type="rviz" name="rviz" />
<group if="$(arg run_stereo_image_proc)" >
<!--
video to disparity processing
We repawn, as stereo_image_proc will exit if the topics it expects are not being published. Note it will
also not publish on its own, anless it's topics are subscribed to.
-->
<remap from="/$(arg stereo_namespace)/left/image_raw" to="/sensor_msgs/Image/Video/left/image" />
<remap from="/$(arg stereo_namespace)/right/image_raw" to="/sensor_msgs/Image/Video/right/image" />
<remap from="/$(arg stereo_namespace)/left/camera_info" to="/sensor_msgs/Image/Video/left/camera_info" />
<remap from="/$(arg stereo_namespace)/right/camera_info" to="/sensor_msgs/Image/Video/right/camera_info" />
<!--
stereo image processing
-->
<node unless="$(arg disparity_nodelet)" pkg="stereo_image_proc" type="stereo_image_proc" name="stereo_image_proc" output="$(arg output)" ns="$(arg stereo_namespace)" respawn="true" respawn_delay="30" />
<node if="$(arg disparity_nodelet)" pkg="nodelet" type="nodelet" name="stereo_image_proc" output="$(arg output)" ns="$(arg stereo_namespace)" respawn="true" respawn_delay="30" args="load stereo_image_proc/disparity $(arg manager) --bond" />
</group>
<node if="$(arg run_configure)" pkg="rqt_reconfigure" type="rqt_reconfigure" name="rqt_reconfigure" />
</launch>
修改
 修改后,启动试试:
修改后,启动试试:
纠错,疑问,交流: 911946883@qq.com
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)