win11+wsl2
请配合视频使用,如果不看视频会对下面的配置过程迷惑。因为一开始我是想安装在ubuntu18.04的,中途发现ubuntu18.04没有ros-noetic,所以转入ubuntu20.04配置。 视频链接
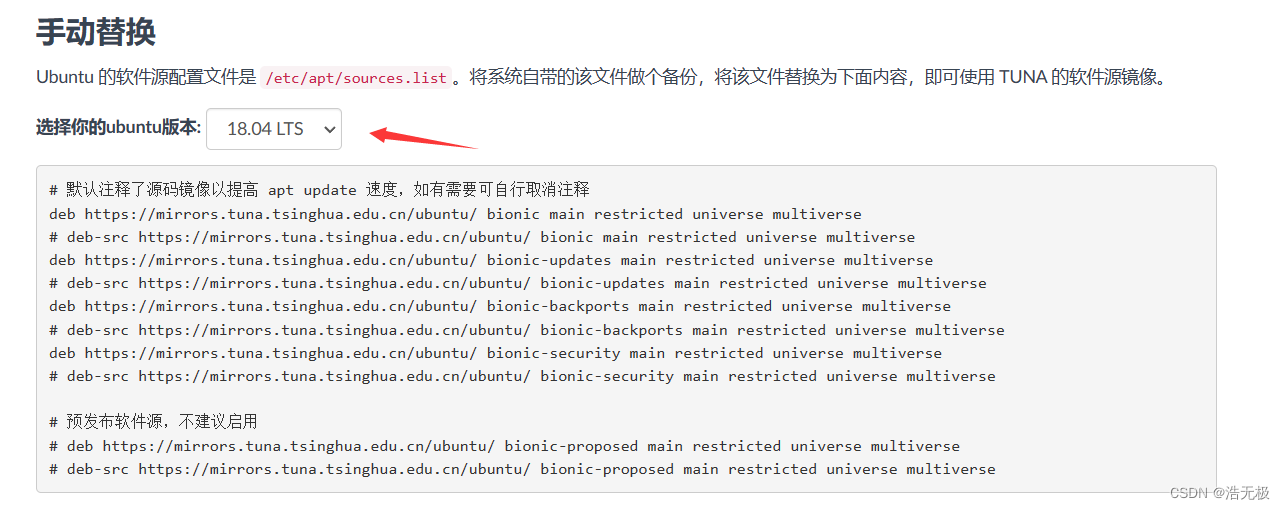
1、wsl --install -d Ubuntu-18.04 因为我有一个Ubuntu-20.04作为ROS + PX4的开发环境,所以这里安装一个其他版本的Ubuntu系统 Ubuntu子系统安装 下图是安装完成自启动Ubuntu18.04的界面,输入用户名和密码即可。 2、新系统换源 如果没有gedit,则下载sudo apt-get install gedit 然后打开一个系统源文件sudo gedit /etc/apt/source.list 打开清华源网站 选择版本,复制到source.list,保存 sudo apt-get update sudo apt-get upgrade 执行这两行代码,更新一下 3、整体参考官方链接,选择win+linux开发 官方链接
wsl --install -d Ubuntu-18.04
sudo apt-get install gedit
sudo gedit /etc/apt/source.list
sudo apt-get update
sudo apt-get upgrade
1)sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list' 2)sudo apt install curl 3)curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add - 解决方法 443访问错误解决方法 关于第3)步,上面的方法我都试过了,不行,但我是能连上这个网站的。于是,直接复制下来,在Ubuntu当前路径下新建一个key.txt,复制到里面,执行curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add key.txt OK了! 4)sudo apt update sudo apt-get upgrade 5)鱼香ros一键安装助手下载 ros-noetic ROS环境搭建参考这里 尴尬,到这里才发现ros-noetic配套ubuntu20.04。 6)下载源码 进入路径 7)构建roswrapper 8)WIN 端下载并启动模拟器 9)LINUX 端启动 roswrapper 注意:提高权限chmod 777 simulator.sh 下载包sudo apt install gnome-terminal
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
sudo apt install curl
curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -
curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add key.txt
sudo apt update
chmod 777 simulator.sh
sudo apt install gnome-terminal
启动成功,配置完成!