我们首先回顾下特征值和特征向量的定义如下:
A
x
=
λ
x
Ax=λx
Ax=λx 其中A是一个n×n的实对称矩阵,x是一个n维向量,则我们说λ是矩阵A的一个特征值,而x是矩阵A的特征值λ所对应的特征向量。
求出特征值和特征向量有什么好处呢? 就是我们可以将矩阵A特征分解。如果我们求出了矩阵A的n个特征值
λ
1
≤
λ
2
≤
.
.
.
≤
λ
n
λ_1≤λ_2≤...≤λ_n
λ1≤λ2≤...≤λn,以及这n个特征值所对应的特征向量
w
1
,
w
2
,
.
.
.
,
w
n
w_1,w_2,...,w_n
w1,w2,...,wn,如果这n个特征向量线性无关,那么矩阵A就可以用下式的特征分解表示:
A
=
W
Σ
W
−
1
A=WΣW^−1
A=WΣW−1
其中W是这n个特征向量所张成的n×n维矩阵,而Σ为这n个特征值为主对角线的n×n维矩阵。一般我们会把W的这n个特征向量标准化,即满足
∣
∣
w
i
∣
∣
2
=
1
||w_i||_2=1
∣∣wi∣∣2=1, 或者说
w
i
T
w
i
=
1
w^T_iw_i=1
wiTwi=1,此时W的n个特征向量为标准正交基,满足
W
T
W
=
I
W^TW=I
WTW=I,即
W
T
=
W
−
1
W^T=W^−1
WT=W−1, 也就是说W为酉矩阵。
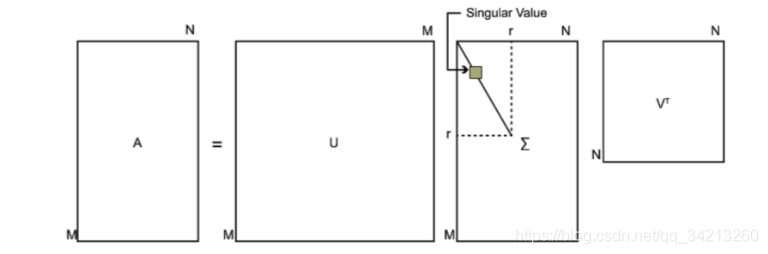
SVD也是对矩阵进行分解,但是和特征分解不同,SVD并不要求要分解的矩阵为方阵。假设我们的矩阵A是一个m×n的矩阵,那么我们定义矩阵A的SVD为:
A
=
U
Σ
V
T
A=UΣV^T
A=UΣVT
其中U是一个m×m的矩阵,Σ是一个m×n的矩阵,除了主对角线上的元素以外全为0,主对角线上的每个元素都称为奇异值,V是一个n×n的矩阵。U和V都是酉矩阵,即满足
U
T
U
=
I
,
V
T
V
=
I
U^TU=I,V^TV=I
UTU=I,VTV=I。下图可以很形象的看出上面SVD的定义:
1.3 求出SVD分解后的U,Σ,V矩阵
如果我们将A的转置和A做矩阵乘法,那么会得到n×n的一个方阵
A
T
A
A^TA
ATA。既然ATA是方阵,那么我们就可以进行特征分解,得到的特征值和特征向量满足下式:
(
A
T
A
)
v
i
=
λ
i
v
i
(A^TA)v_i=λ_iv_i
(ATA)vi=λivi 这样我们就可以得到矩阵
A
T
A
A^TA
ATA的n个特征值和对应的n个特征向量v了。将
A
T
A
A^TA
ATA的所有特征向量张成一个n×n的矩阵V,就是我们SVD公式里面的V矩阵了。一般我们将V中的每个特征向量叫做A的右奇异向量。
如果我们将A和A的转置做矩阵乘法,那么会得到m×m的一个方阵
A
A
T
AA^T
AAT。既然
A
A
T
AA^T
AAT是方阵,那么我们就可以进行特征分解,得到的特征值和特征向量满足下式:
(
A
A
T
)
u
i
=
λ
i
u
i
(AA^T)u_i=λ_iu_i
(AAT)ui=λiui
这样我们就可以得到矩阵
A
A
T
AA^T
AAT的m个特征值和对应的m个特征向量u了。将AAT的所有特征向量张成一个m×m的矩阵U,就是我们SVD公式里面的U矩阵了。一般我们将U中的每个特征向量叫做A的左奇异向量。
我们注意到:
A
=
U
Σ
V
T
⇒
A
V
=
U
Σ
V
T
V
⇒
A
V
=
U
Σ
⇒
A
v
i
=
σ
i
u
i
⇒
σ
i
=
A
v
i
/
u
i
A=UΣV^T⇒AV=UΣV^TV⇒AV=UΣ⇒Av_i=σ_iu_i⇒σ_i=Av_i/u_i
A=UΣVT⇒AV=UΣVTV⇒AV=UΣ⇒Avi=σiui⇒σi=Avi/ui 这样我们可以求出我们的每个奇异值,进而求出奇异值矩阵Σ。
上面还有一个问题没有讲,就是我们说ATA的特征向量组成的就是我们SVD中的V矩阵,而AAT的特征向量组成的就是我们SVD中的U矩阵,这有什么根据吗?这个其实很容易证明,我们以V矩阵的证明为例。
A
=
U
Σ
V
T
⇒
A
T
=
V
Σ
T
U
T
⇒
A
T
A
=
V
Σ
T
U
T
U
Σ
V
T
=
V
Σ
2
V
T
A=U \Sigma V^{T} \Rightarrow A^{T}=V \Sigma^{T} U^{T} \Rightarrow A^{T} A=V \Sigma^{T} U^{T} U \Sigma V^{T}=V \Sigma^{2} V^{T}
A=UΣVT⇒AT=VΣTUT⇒ATA=VΣTUTUΣVT=VΣ2VT
上式证明使用了:
U
T
U
=
I
,
Σ
T
Σ
=
Σ
2
U^TU=I,Σ^TΣ=Σ^2
UTU=I,ΣTΣ=Σ2。 可以看出
A
T
A
A^TA
ATA的特征向量组成的的确就是我们SVD中的V矩阵。类似的方法可以得到
A
A
T
AA^T
AAT的特征向量组成的就是我们SVD中的U矩阵。 进一步我们还可以看出我们的特征值矩阵等于奇异值矩阵的平方,也就是说特征值和奇异值满足如下关系:
σ
i
=
λ
i
\sigma_{i}=\sqrt{\lambda_{i}}
σi=λi 这样也就是说,我们可以不用
σ
i
=
A
v
i
/
u
i
=
\sigma_{i}=A v_{i} / u_{i}=
σi=Avi/ui=来计算奇异值,也可以通过求出
A
T
A
A^TA
ATA的特征值取平方根来求奇异值。
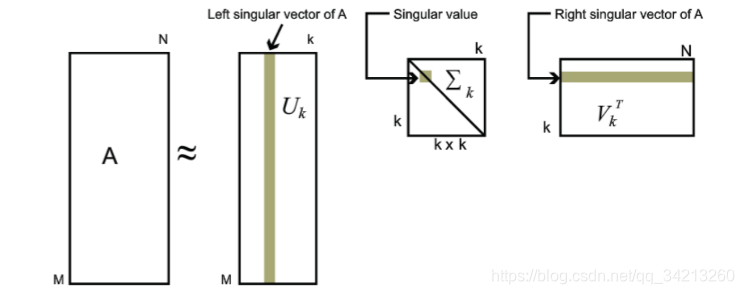
对于奇异值,它跟我们特征分解中的特征值类似,在奇异值矩阵中也是按照从大到小排列,而且奇异值的减少特别的快,在很多情况下,前10%甚至1%的奇异值的和就占了全部的奇异值之和的99%以上的比例。也就是说,我们也可以用最大的k个的奇异值和对应的左右奇异向量来近似描述矩阵。也就是说:
A
m
×
n
=
U
m
×
m
Σ
m
×
n
V
n
×
n
T
≈
U
m
×
k
Σ
k
×
k
V
k
×
n
T
A_{m \times n}=U_{m \times m} \Sigma_{m \times n} V_{n \times n}^{T} \approx U_{m \times k} \Sigma_{k \times k} V_{k \times n}^{T}
Am×n=Um×mΣm×nVn×nT≈Um×kΣk×kVk×nT 其中k要比n小很多,也就是一个大的矩阵A可以用三个小的矩阵
U
m
×
k
,
Σ
k
×
k
,
V
k
×
n
T
U_{m×k},Σ_{k×k},V^T_{k×n}
Um×k,Σk×k,Vk×nT 来表示。 如下图所示,现在我们的矩阵A只需要灰色的部分的三个小矩阵就可以近似描述了。
min
∥
A
x
−
b
∥
2
2
A
∈
R
m
∗
n
x
∈
R
n
b
∈
R
m
\begin{array}{l} \min \|A x-b\|_{2}^{2} \\ A \in R^{m^{* n}} \quad x \in R^{n} \quad b \in R^{m} \end{array}
min∥Ax−b∥22A∈Rm∗nx∈Rnb∈Rm m个方程求解n个未知数,有三种情况:
m=n且A为非奇异,则有唯一解,
x
=
A
−
1
b
x=A^{-1}b
x=A−1b
m>n,约束的个数大于未知数的个数,称为超定问题(overdetermined)
m<n,负定/欠定问题(underdetermined)
通常我们遇到的都是超定问题,此时Ax=b的解是不存在的,从而转向解最小二乘问题:
J
(
x
)
=
m
i
n
∥
A
x
−
b
∥
2
2
J(x)=min \|A x-b\|_{2}^{2}
J(x)=min∥Ax−b∥22 J(x)为凸函数,我们令一阶导数为0,得到:
A
T
A
x
−
A
T
b
=
0
A^{T} A x-A^{T} b=0
ATAx−ATb=0,称之为正规方程一般解:
x
=
(
A
T
A
)
−
1
A
T
b
x=\left(A^{T} A\right)^{-1} A^{T} b
x=(ATA)−1ATb