前言
室内探索无人机是一种专为在室内环境中进行任务的无人机系统。相比传统的人员部署,室内探索无人机具有更高的灵活性和机动性,能够在复杂的室内环境中执行任务,用于未知环境的探索和特定目标的搜索。
为完成无人机室内搜索与识别等复杂任务,阿木实验室推出了一套全新的室内无人机探索系统。该系统集成了自主定位、视觉SLAM模块、路径规划模块和目标识别模块等关键算法和功能,为开发者提供一套开源、智能的室内无人机探索解决方案。
任务规则
预设有10×16米的矩形房间一间,前后各设有一个标准门,前后均有一个一个标准门,外侧设有3扇窗户,房间内有桌椅板凳若干、立柱若干、文件柜若干、会议桌若干以及人员若干。
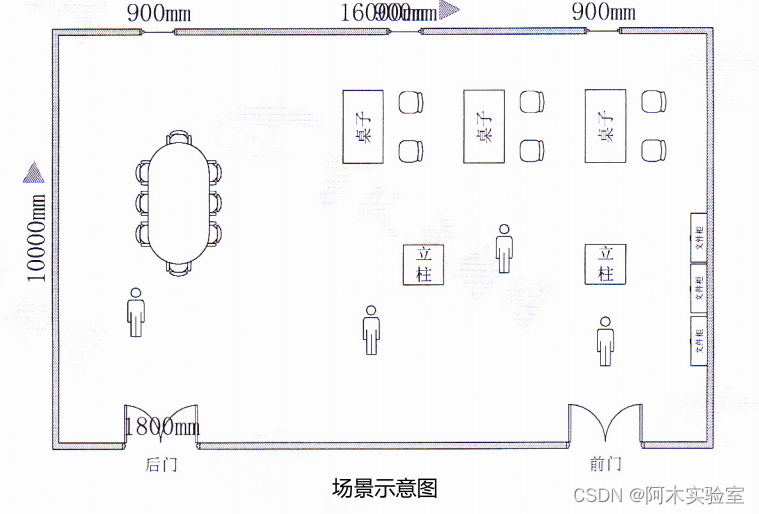
实验者通过地面站对飞行参数进行配置,指定起飞点与返回点。起飞之后,无人机按照预设定的进入点进入房间,采取全程自主飞行模式,对房间内指定目标进行搜索,发现目标物体且判明目标类别和位置,将目标信息回传至地面站并拍照记录,同步将目标位置显示到规划地图之中。搜索完毕后,从指定返回出库返回并降落。
解决方案
1、仿真方案
Prometheus仿真开发套件-独显款。
 Prometheus专业版地面站
Prometheus专业版地面站
PrometheusGroundStation-Pro简介:该软件是使用Qt开发的基于Prometheus自主无人机开源项目的人机交互界面,简化了Prometheus的操作和使用流程,同时采用TCP/UDP通信机制,避免了ROS1多机通信繁琐的配置。该地面站可以让用户更快复现Prometheus中的各种功能,且同时适用于真机和仿真系统。该地面站目前已适配了Prometheus项目中绝大数功能。包括但不限于单机、集群、吊舱、视觉控制操作、以及数据的实时反馈等。
Prometheus开源项目简介:Prometheus是一套开源的自主无人机软件系统平台,为无人机的智能与自主飞行提供全套解决方案。本项目基于PX4开源飞控固件和ROS机器人操作系统,旨在为无人机开发者配套成熟可用的机载电脑端软件系统,提供更加简洁快速的开发体验。目前已集成控制、规划及目标检测等研究方向,提供多个功能demo,并配套有Amovlab仿真组件。
SpireCV开源项目简介:SpireCV是一个专为智能无人系统打造的机载图像实时处理 SDK,主要功能包括吊舱/相机控制、视频保存、推流、目标检测、识别与跟踪等。旨在为智能无人系统开发者提供高性能、高可靠、接口简洁、功能丰富的视觉处理功能。
部署了Prometheus开源自主无人机仿真平台,在Gazebo平台中搭建场景示意图,结合建图模块,规划模块以及SpireCV视觉库在仿真平台中初步实现整个任务。
2、真机方案
P450顶配配置(P450+T265+D435i+50C+单目)的开源无人机、路由器、地面站笔记本电脑。
 科研平台P450开源无人机(顶配版)
科研平台P450开源无人机(顶配版)
首先,我们在笔记本电脑中运行Promehteus专业版地面站连接无人机机载电脑,进行相关参数配置,并远程启动运行机载自主飞行程序。无人机起飞后,依靠自身传感器完成室内拒止环境自主定位,并按照程序预设的室内空间范围进行目标物搜索。为了安全避开空间中的障碍物,无人机依靠激光雷达等传感器构建空间地图,并根据路径规划及轨迹优化算法生成安全且平滑的轨迹。无人机依靠向下单目相机,在机载电脑端运行SpireCV视觉库,提前训练指定目标(农夫山泉和脉动两类瓶子),在无人机整个路径规划过程中进行指定目标搜索,发现现目标物体且判明目标类别和位置,将目标信息回传至地面站并拍照记录,同步将目标位置显示到规划地图之中。
通过多次实物演示,阿木实验室验证了本系统在室内环境中的可行性和稳定性,可以完成室内飞行和目标搜索等复杂任务。
总结
通过多次实物演示,阿木实验室验证了本系统在室内环境中的可行性和稳定性,可以完成室内飞行和目标搜索等复杂任务。
这套室内搜索基于P450顶配版的无人机系统 ,皆在为开发者提供一个集成度完整的二次开发平台。开发者可以根据自身需求在该平台上进行深入的探索研究,且可应用于侦察敌方阵地、搜索敌方藏匿目标、提供实时情报等场景。
阿木实验室将进一步完善该套系统的功能和性能。不久的将来,我们将推出全新的P450系列产品,敬请期待!