专家PID
专家控制
专家控制是模拟人类专家控制的方式。它具有大量的专门知识和经验,和专家控制一样不需要知道对象的模型的情况下,对系统进行控制。
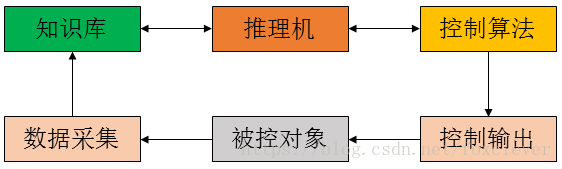
专家控制的基本结构
和人类专家控制一样,知识库越是丰富,推理机越是精确,控制效果也就越好。不同的知识库和推理机,控制效果也不经相同。这也是专家控制的一个特点,利用这个特点,可以设计属于自己的专家控制系统。
专家控制的基本实现
直接性专家控制
专家控制器直接对执行机构进行控制。

间接型专家控制
专家控制通过控制算法,对控制器进行操作,由控制器对执行机构进行控制。

专家PID
专家PID是专家控制和PID的结合,两者都不需要知道被控对象的模型。
简单的专家PID
下面的例子是增量式PID的实现方式,理解了思路,也就是对偏差和偏差增量的判断采取控制。便可以用C语言进行实现。
通过偏差和偏差的增量来判断应采用的PID控制类型,从而更快更平稳地实现收敛。
下面是这个是普遍型的规则库的实现:
当前时刻误差

误差增量

上次误差增量
K1和K2为增益系数,K1>K2
M1,M2为设定的误差界限,M1>M2>M3
这里的专家控制有5条控制规则:
1:误差超过设定的最大值(M1),输出PID控制器的最大值,进行开环控制,对极限情况进行控制。以迅速达到偏差作用。

2:误差的绝对值在变大或者维持常值,实施较强的控制作用

再次对偏差进行判断,选择不同的控制强度。
若误差超过设定的最大值(M2),实行较强控制,减少误差
控制器输出:

若误差小于设定的最大值(M2),实现一般较弱控制
控制器输出:也可以减少K1的值

说明此时误差仍然较大,可将 k1增大,反之可以减小。这样可以比分别使用两套参数减少2个待调参数,当然模型的容量也有一定程度下降。
3:误差的绝对值减少后者误差已经达到平衡状态,维持控制器输出不变


4:误差处于极值状态

再次对偏差进行判断,选择不同的控制强度。
若误差超过设定的最大值(M2),实行较强控制,减少误差
控制器输出:

若误差小于设定的最大值(M2),实现较弱控制
控制器输出:

5:若误差小于设定的最小值(M3),增加控制精度

设置控制精度,可能是由系统的静差导致的,用PI控制,减少静差。

Kp和Ki可以适当减小,以减小控制作用。当偏差小到一定程度后,甚至可以引入死区的概念,是系统稳定下来而不需要去进行调节。
思维导图

C语言实现:增量式专家PID
//输出限幅
#define OUT_MIN -1000
#define OUT_MAX 1000
#define DEAD_BAND 10 //死区控制线
#include"math.h"
//PID结构体
//PID结构体
typedef struct
{
volatile double Proportion; // 比例常数 Proportional Const
volatile double Integral; // 积分常数 Integral Const
volatile double Derivative;// 微分常数 Derivative Const
volatile double Error1; // Error[n-1]
volatile double Error2; // Error[n-2]
volatile double iError; // Error[n]
volatile double Error_sum;//积分值
volatile double iIncpid;//PID输出值
volatile double inc_iError;//Error[n]增量
volatile double inc_Error1;//Error[n-1]增量
volatile double Error_abs_Max;//偏差绝对值最大值
volatile double Error_abs_Mid;//偏差绝对值最中值
volatile double Error_abs_Min;//偏差绝对值最小值
} PID;
/****************************************************************************************/ // 增量式专家
// //pwm=Kp*e(k)+Ki*∑e(k)+Kd[e(k)-e(k-1)]
/****************************************************************************************/
double Exper_Pid_Inc (double iError,PID* sptr)
{
double result=0;
sptr->iError=iError; //传入当前误差
sptr->inc_iError=sptr->iError-sptr->Error1;//得到这次增量
sptr->inc_Error1=sptr->Error1-sptr->Error2;//得到上次增量
if(abs(sptr->iError)>sptr->Error_abs_Max)//误差超过设定的最大值(M1)
{
if(sptr->iError>0) result=OUT_MAX;
if(sptr->iError<0) result=OUT_MIN;
}
if(abs(sptr->iError)<=sptr->Error_abs_Min)//若误差小于设定的最小值(M3)
{
if(fabs(sptr->iError)>DEAD_BAND) //死区控制
{
result=sptr->iIncpid+0.5*sptr->Proportion * sptr->inc_iError // P
+0.3*sptr->Integral * sptr->iError; // I
}
else result=0;
}
if((sptr->iError*sptr->inc_iError<0)&&(sptr->inc_iError*sptr->inc_Error1>0))||(sptr->iError==0))
//说明误差正在减小,或者为零,此时维持原输出
{
result=sptr->iIncpid;//保持上一次输出
}
if((sptr->iError*sptr->inc_iError<0)&&(sptr->inc_iError*sptr->inc_Error1<0)))//误差处于极值状态
{
if(abs(sptr->iError)>sptr->Error_abs_Mid) result=sptr->iIncpid+1.2*sptr->Integral*sptr->iError;
if(abs(sptr->iError)<sptr->Error_abs_Mid) result=sptr->iIncpid+0.6*sptr->Integral*sptr->iError;
}
if(((sptr->iError*sptr->inc_iError>0)||(sptr->inc_iError==0))//误差在变大,或维持长值
{
if(abs(sptr->iError)>sptr->Error_abs_Mid) result=sptr->iIncpid+2*(sptr->Integral*sptr->iError+sptr->Proportion*sptr->inc_iError+sptr->Derivative*(sptr->inc_iError-sptr->inc_Error1));
if(abs(sptr->iError)<sptr->Error_abs_Mid) result=sptr->iIncpid+1.2*(sptr->Integral*sptr->iError+sptr->Proportion*sptr->inc_iError+sptr->Derivative*(sptr->inc_iError-sptr->inc_Error1));
}
//更新值
sptr->iIncpid=result;
sptr->Error2=sptr->Error1;
sptr->Error1=sptr->iError;
result=PID_OutputLimit(result);//PID输出限幅
return(result); // 返回计算值
}
//PID输出限制,根据PWM的输出值进行增量式PID输出限制
double PID_OutputLimit(double output)
{
if (output < OUT_MIN)
{
output = OUT_MIN;
}
else if (output > OUT_MAX)
{
output = OUT_MAX;
}
return output;
}
C语言实现:位置式专家PID
//输出限幅
#define OUT_MIN -1000
#define OUT_MAX 1000
//积分限幅
#define INERGRAL_MAX 200
#define INERGRAL_MIX -200
#include"math.h"
//PID结构体
typedef struct
{
volatile double Proportion; // 比例常数 Proportional Const
volatile double Integral; // 积分常数 Integral Const
volatile double Derivative;// 微分常数 Derivative Const
volatile double Error1; // Error[n-1]
volatile double Error2; // Error[n-2]
volatile double iError; // Error[n]
volatile double Error_sum;//积分值
volatile double iIncpid;//PID输出值
volatile double inc_iError;//Error[n]增量
volatile double inc_Error1;//Error[n-1]增量
volatile double Error_abs_Max;//偏差绝对值最大值
volatile double Error_abs_Mid;//偏差绝对值最中值
volatile double Error_abs_Min;//偏差绝对值最小值
} PID;
/****************************************************************************************/ // 位置式专家PID
// //pwm=Kp*e(k)+Ki*∑e(k)+Kd[e(k)-e(k-1)]
/****************************************************************************************/
#include "math.h"
//********************************PID算法部分************************************//
#define OUT_MIN -500
#define OUT_MAX 500
//积分限幅
#define INERGRAL_MAX 200
#define INERGRAL_MIN -200
//PID初始化
void PID_Init(PID *sptr)
{
sptr->Derivative = 0;//Kd
sptr->Proportion = 0;//Kp
sptr->Integral = 0;//Ki
sptr->Error2 = 0;
sptr->Error1 = 0;
sptr->iError = 0;
sptr->Error_sum = 0;
//sptr->index=1;
sptr->iIncpid = 0;
sptr->inc_iError = 0;
sptr->inc_Error1 = 0;
sptr->Error_abs_Max = 150;
sptr->Error_abs_Mid = 100;
sptr->Error_abs_Min = 50;
}
//PID输出限幅处理
double PID_OutputLimit(double output)
{
double x;
x = output;
if (x <= OUT_MIN)
{
x = (double)OUT_MIN;
}
else if (x >= OUT_MAX)
{
x = (double)OUT_MAX;
}
return x;
}
/****************************************************************************************/ // 增量式专家
// //pwm=Kp*e(k)+Ki*∑e(k)+Kd[e(k)-e(k-1)]
/****************************************************************************************/
double Exper_Pid_Pos(double iError, PID* sptr)
{
double result = 0;
sptr->iError = iError; //传入当前误差
sptr->inc_iError = sptr->iError - sptr->Error1;//得到这次增量
sptr->inc_Error1 = sptr->Error1 - sptr->Error2;//得到上次增量
sptr->iError=iError; // 计算当前误差
sptr->Error_sum+=sptr->iError;//积分项
///当输出限幅的时候,积分累加部分也应同时进行限幅,以防输出不变而积分项继续累加,也即所谓的积分饱和过深。
//积分量限幅
if(sptr->Error_sum >=INERGRAL_MAX)
{
sptr->Error_sum = INERGRAL_MAX ;
}
if(sptr->Error_sum < INERGRAL_MIN)
{
sptr->Error_sum =INERGRAL_MIN ;
}
if (fabs(sptr->iError) > sptr->Error_abs_Max)//误差超过设定的最大值(M1)
{
if (sptr->iError > 0) result = OUT_MAX;
if (sptr->iError < 0) result = OUT_MIN;
}
if (fabs(sptr->iError) <= sptr->Error_abs_Min)//若误差小于设定的最小值(M3)
{
if (fabs(sptr->iError) > DEAD_BAND) //死区控制
{
result = 0.5*sptr->Proportion * sptr->iError// P
+ 0.3*sptr->Integral * sptr->Error_sum ; // I
}
else result = 0;
}
if (((sptr->iError*sptr->inc_iError < 0) && (sptr->inc_iError*sptr->inc_Error1 > 0)) || (sptr->iError == 0))
//说明误差正在减小,或者为零,此时维持原输出
{
result = sptr->iIncpid;//保持上一次输出
}
if (((sptr->iError*sptr->inc_iError < 0) && (sptr->inc_iError*sptr->inc_Error1 < 0)))//误差处于极值状态
{
if(fabs(sptr->iError)>sptr->Error_abs_Mid) result=1.8*sptr->Integral*sptr->Error_sum;
if(fabs(sptr->iError)<sptr->Error_abs_Mid) result=1.2*sptr->Integral*sptr->Error_sum;
}
if ((sptr->iError*sptr->inc_iError > 0) || (sptr->inc_iError == 0))//误差在变大,或维持长值
{
if(abs(sptr->iError)>sptr->Error_abs_Mid) result=2*(sptr->Integral*sptr->Error_sum+sptr->Proportion*sptr->iError+sptr->Derivative*sptr->inc_iError);
if(abs(sptr->iError)<sptr->Error_abs_Mid) result=1.1*(sptr->Integral*sptr->Error_sum+sptr->Proportion*sptr->iError+sptr->Derivative*sptr->inc_iError);
}
//更新值
sptr->iIncpid = result;
sptr->Error2 = sptr->Error1;
sptr->Error1 = sptr->iError;
result = PID_OutputLimit(result);//PID输出限幅
return(result); // 返回计算值
}
//PID输出限制,根据PWM的输出值进行增量式PID输出限制
double PID_OutputLimit(double output)
{
if (output < OUT_MIN)
{
output = OUT_MIN;
}
else if (output > OUT_MAX)
{
output = OUT_MAX;
}
return output;
}
总结
通过这个简单的例子,大概了解直接性专家控制。最明显的优势,控制决策的灵活性,可以根据不同的系统,选择不同和设计不同的控制策略,通过修改、增加控制规则,可不断积累知识,改进控制性能。能够满足任意动态过程的控制需要,尤其适用于带有时变、非线性和强干扰的控制;但问题是,调试比普通PID复杂,设计的控制规则需要经验。