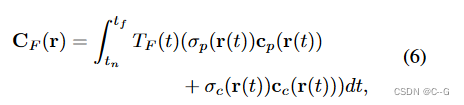
对于每个像素,建立了衰减模型,表示由于物体散射的直接光造成的损失强度,以及由于环境光散射到观察者而造成的空气光
c
p
c_p
cp的贡献。 l 为透射,
C
F
C_F
CF对应观测到的像素值,
C
c
C_c
Cc为清晰场景
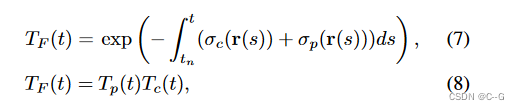
透射率 l 可由衰减系数
σ
p
σ_p
σp和深度D计算得到
NeRF体渲染公式 积分对象颜色
C
c
C_c
Cc 定义为在位置 r 处发射的颜色
C
c
(
r
)
C_c (r)
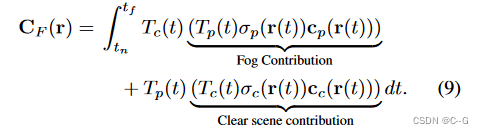
Cc(r); 放宽对
σ
p
σ_p
σp 和
c
p
c_p
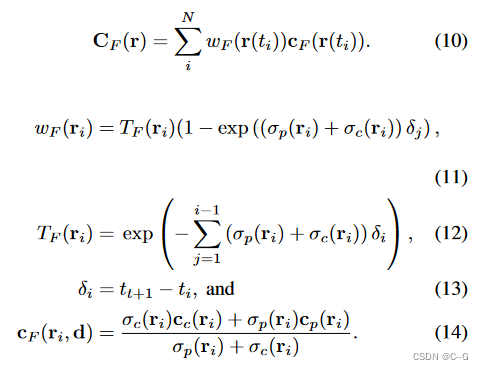
cp 的约束,允许它们近似任意值 离散化表示为 对于使用MLP得到的
σ
i
,
c
i
i
∈
{
c
,
p
}
\sigma_i,c_i \ i\in \{c,p\}
σi,cii∈{c,p},可以表示为 通过缩放
σ
p
σ_p
σp 来渲染不同雾密度的场景,甚至通过设置
σ
p
=
0
σ_p = 0
σp=0 来完全去雾化图像,当
σ
p
=
0
σ_p = 0
σp=0,渲染公式为:
损失函数
rgb损失 大气光颜色损失
I
F
I_F
IF 是模糊图像的相对亮度
I
F
(
r
)
=
ξ
⋅
l
i
n
(
C
ˉ
F
(
r
)
)
I_F(r) = \xi \cdot lin(\bar{C}_F(r))
IF(r)=ξ⋅lin(CˉF(r))
c
p
0
c^0_p
cp0 是在暗信道先验条件下计算的初始全局恒定大气光估计值
z
=
1
/
(
l
−
1
)
z = 1/(l-1)
z=1/(l−1)
λ
\lambda
λ 是加权因子
场景中投射的光线具有峰值单峰射线终止分布 正则化散射介质
σ
^
p
\hat{\sigma}_p
σ^p的密度,
σ
^
p
\hat{\sigma}_p
σ^p以半监督的方式拟合,能够模拟雾的不均匀性。应用基于熵的损失,允许网络
f
p
f_p
fp 学习空间变化的介质密度
a
~
F
i
=
a
^
F
i
∑
j
a
^
F
j
a
^
F
i
=
1
−
e
x
p
(
(
σ
^
p
i
+
σ
^
c
i
)
δ
i
)
\tilde{a}_{F_i}=\frac{\hat{a}_{F_i}}{\sum_j\hat{a}_{F_j}} \hat{a}_{F_i}=1-exp((\hat{\sigma}_{p_i}+\hat{\sigma}_{c_i})\delta_i)
a~Fi=∑ja^Fja^Fia^Fi=1−exp((σ^pi+σ^ci)δi)
熵最大化依赖于场景体积密度
σ
^
c
\hat{σ}_c
σ^c 来解开这两种分布,而不仅仅是在整个场景中分布雾体积密度
σ
^
F
\hat{σ}_F
σ^F。只对
σ
p
σ_p
σp,而不是
σ
c
σ_c
σc,最小化这个损失
深度损失
通过立体传感器设置估计的深度
D
ˉ
\bar{D}
Dˉ来监督场景深度 立体深度网络在大雾条件下具有鲁棒性,它们适合于直接监督场景NeRF
总损失
采样
由于
σ
F
σ_F
σF在整个场景中被正则化为近似常数,重新采样过程不会使用场景权重
W
F
W_F
WF 而是使用去雾后场景权重
W
c
W_c
Wc