目录
前言
设计思路
一、课题背景与意义
二、算法理论原理
2.1 卷积神经网络
2.2 SVM算法
三、检测的实现
最后
前言
????大四是整个大学期间最忙碌的时光,一边要忙着备考或实习为毕业后面临的就业升学做准备,一边要为毕业设计耗费大量精力。近几年各个学校要求的毕设项目越来越难,有不少课题是研究生级别难度的,对本科同学来说是充满挑战。为帮助大家顺利通过和节省时间与精力投入到更重要的就业和考试中去,学长分享优质的选题经验和毕设项目与技术思路。
????
对毕设有任何疑问都可以问学长哦!
选题指导:
最新最全计算机专业毕设选题精选推荐汇总
大家好,这里是海浪学长毕设专题,本次分享的课题是
????基于卷积神经网络的视频图像分类系统
设计思路
一、课题背景与意义
基于图像的分类算法是机器学习领域的热门课题。在这些算法中,首先需要获取图像的特征信息,然后利用不同的计算方法来计算不同图像之间的相似度结果,最后根据相似度结果对图像进行分类。通过提取图像的特征信息并计算相似度,可以根据图像的语义相似度进行分类。这种方法对于进行图像分类和语义信息分析具有重要意义。
二、算法理论原理
基于卷积神经网络(CNN)的支持向量机(SVM)分类算法结合了CNN强大的自学能力和SVM超强的泛化能力,能够实现更强大且更快速的学习算法。CNN能够自动学习图像的特征信息,无需复杂的图像处理过程。通过将SVM的分类器替换CNN的输出层,并利用SVM进行分类,可以实现更优越的学习算法。
2.1 卷积神经网络
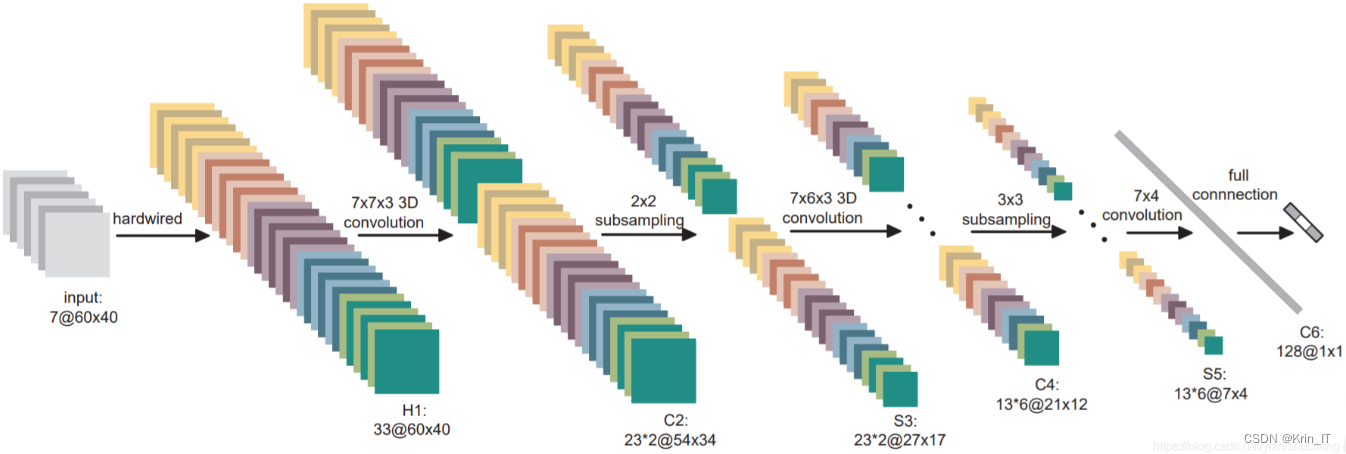
卷积神经网络是一种在计算机视觉和图像处理领域广泛应用的深度学习模型。它的设计灵感来自于生物学上的视觉系统,旨在模拟人类大脑对视觉信息的处理方式。CNN的核心思想是利用卷积层、池化层和全连接层等组件来自动提取和学习图像的特征。与传统的全连接神经网络相比,CNN更适合处理具有网格结构的数据,如图像。以下是CNN的几个关键组件:
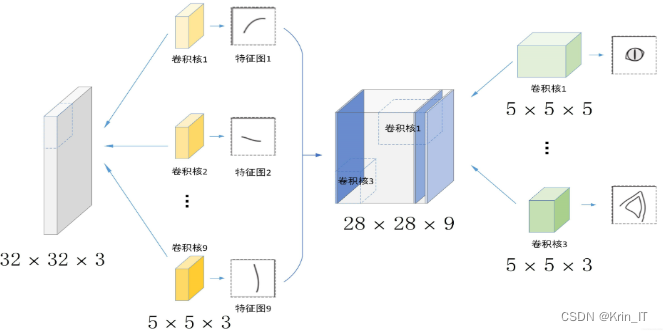
卷积层(Convolutional Layer):卷积层通过应用一系列的卷积核(也称为过滤器)来提取图像的局部特征。每个卷积核在图像上滑动,并通过执行卷积运算来计算与图像局部区域的相似度。这样可以有效地捕捉到图像中的边缘、纹理等特征。
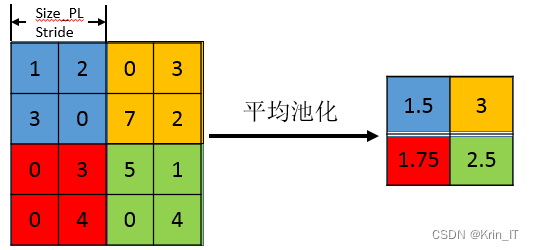
池化层(Pooling Layer):池化层用于减小特征图的尺寸,并保留最重要的特征信息。常见的池化操作包括最大池化和平均池化,它们分别选取局部区域的最大值或平均值作为池化后的值。
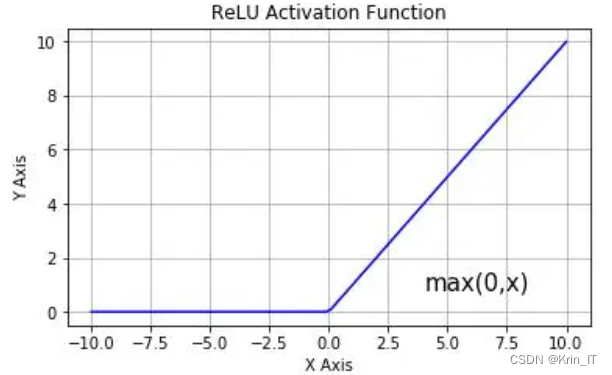
激活函数(Activation Function):激活函数引入非线性性质,使得网络可以学习非线性关系。ReLU函数在卷积神经网络中被广泛选择作为激活函数,主要因为它具有非线性表示能力强、计算效率高、稀疏激活性和解决梯度消失问题等优势。
全连接层(Fully Connected Layer):在CNN的最后几层,全连接层将从前面的层中提取的特征进行扁平化,并将其与权重相乘,得到最终的分类结果。
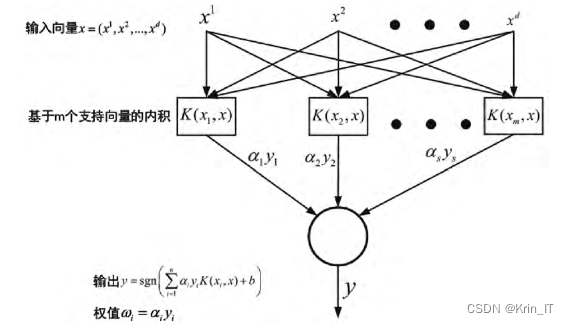
2.2 SVM算法
支持向量机是一种经典的机器学习算法,也可以应用于图像分类系统。在使用SVM进行图像分类时,通常需要将图像转换为向量表示,即提取图像的特征。一种常见的方法是使用特征提取算法(如SIFT、HOG等)从图像中提取出有意义的特征描述符。这些特征描述符可以捕捉到图像中的纹理、形状等信息。
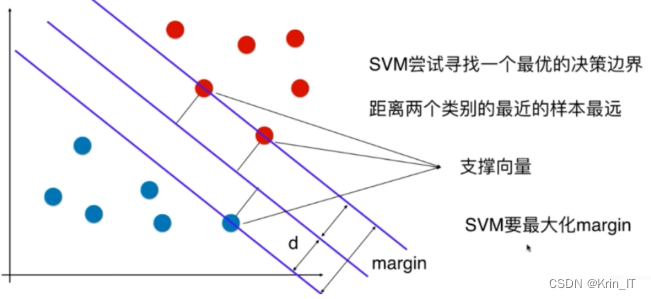
选择合适的核函数是支持向量机(SVM)分类器获得良好分类效果的关键。线性核函数适用于线性可分或高维特征空间,而非线性核函数如径向基函数(RBF)适用于非线性可分情况。参数调节也很重要,如径向基函数中的γ和惩罚因子C,需要结合问题特点和交叉验证选择合适的值。此外,领域知识和经验也对核函数选择有帮助。通过尝试不同核函数和参数组合,并结合评估方法,可以找到最适合问题的核函数,提高SVM分类器的性能。
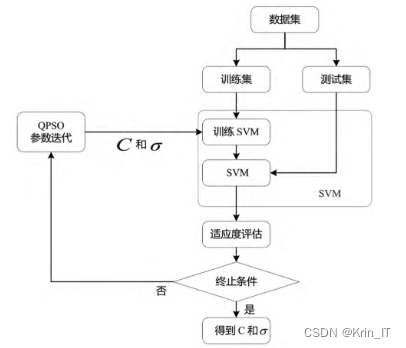
使用粒子群优化算法优化SVM参数的一般过程:
-
初始化粒子群:首先,需要随机初始化一群粒子,每个粒子代表一个解,即一组SVM参数的取值。每个粒子都有一个位置和速度。
-
计算适应度:对于每个粒子,根据其参数设置,使用SVM进行训练,并计算其在训练集上的适应度。适应度可以是分类准确率或其他性能指标,目标是使适应度最大化或误差最小化。
-
更新粒子的速度和位置:根据粒子群优化算法的原理,每个粒子根据自身的历史最优位置和全局最优位置以及邻近粒子的信息,更新自己的速度和位置。这样可以使粒子向全局最优解和历史最优解的方向移动。
-
判断终止条件:可以设置终止条件,如达到最大迭代次数或适应度已经收敛到某个阈值。
-
重复步骤2-4:重复进行步骤2和步骤3,直到满足终止条件。
-
输出最优解:在迭代结束后,选择具有最好适应度的粒子作为SVM参数的最优解。
相关代码示例:
# 定义SVM参数优化目标函数
def svm_objective(params):
gamma, C = params[0], params[1]
model = svm.SVC(kernel='rbf', gamma=gamma, C=C)
model.fit(X, y)
accuracy = model.score(X, y)
return -accuracy # 因为pso算法是最小化问题,所以取相反数使目标最大化
# 定义SVM参数的上下界
lb = [0.1, 0.1] # gamma和C的下界
ub = [10, 10] # gamma和C的上界
# 使用粒子群优化算法优化SVM参数
best_params, _ = pso(svm_objective, lb, ub)
# 打印最优参数
print("最优参数:", best_params)
三、检测的实现
由于网络上没有现有的合适的数据集,我决定自己进行图像拍摄,制作一个全新的数据集。这个数据集包含了各种不同场景的图像,其中包括目标物体的类别和位置信息,以及其他相关环境和背景。通过现场拍摄,我能够捕捉到真实世界中的多样场景和变化条件,这将为我的研究提供更准确、可靠的数据。我相信这个自制的数据集将为图像分类和目标检测研究提供有力的支持,并为该领域的发展做出积极贡献。我将充分利用这个数据集来训练和评估算法模型,以提高图像分类和目标检测的准确性和鲁棒性。
对数据进行过二值化、灰度化、大小尺寸处理,然后用卷积神经网络进行图像的特征提取,最后利用粒群算法优化的 SVM 分类器对测试数据进行分类识别。
相关代码示例:
# 将图像数据转换为CNN模型所需的格式
train_images = train_images.reshape(train_images.shape[0], 64, 64, 1)
test_images = test_images.reshape(test_images.shape[0], 64, 64, 1)
# 构建和训练CNN模型
cnn_model = build_cnn_model()
cnn_model.compile(optimizer='adam', loss='sparse_categorical_crossentropy', metrics=['accuracy'])
cnn_model.fit(train_images, train_labels, epochs=10, batch_size=32)
# 使用训练好的CNN模型提取特征
train_features = cnn_model.predict(train_images)
test_features = cnn_model.predict(test_images)
# 使用粒子群优化算法优化SVM参数
best_params, _ = pso(svm_objective, [0.1, 0.1], [10, 10])
# 构建和训练优化后的SVM分类器
best_gamma, best_C = best_params[0], best_params[1]
svm_model = SVC(kernel='rbf', gamma=best_gamma, C=best_C)
svm_model.fit(train_features, train_labels)
# 在测试数据上进行分类识别
preds = svm_model.predict(test_features)
accuracy = accuracy_score(test_labels, preds)
print("分类识别准确率:", accuracy)
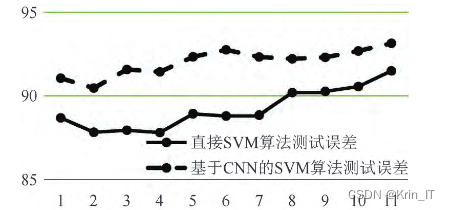
使用SVM算法和基于卷积神经网络的SVM算法在不同训练集和测试集下提取图像特征的效果。您分别增加了训练集和测试集的图片数量,并记录了实验结果。随着训练集和测试集数据量的增加,两种算法的测试精度都有所提高。
创作不易,欢迎点赞、关注、收藏。
毕设帮助,疑难解答,欢迎打扰!
最后