一、系统框架
分为i2c接口、i2c控制、数据处理、串口四个部分
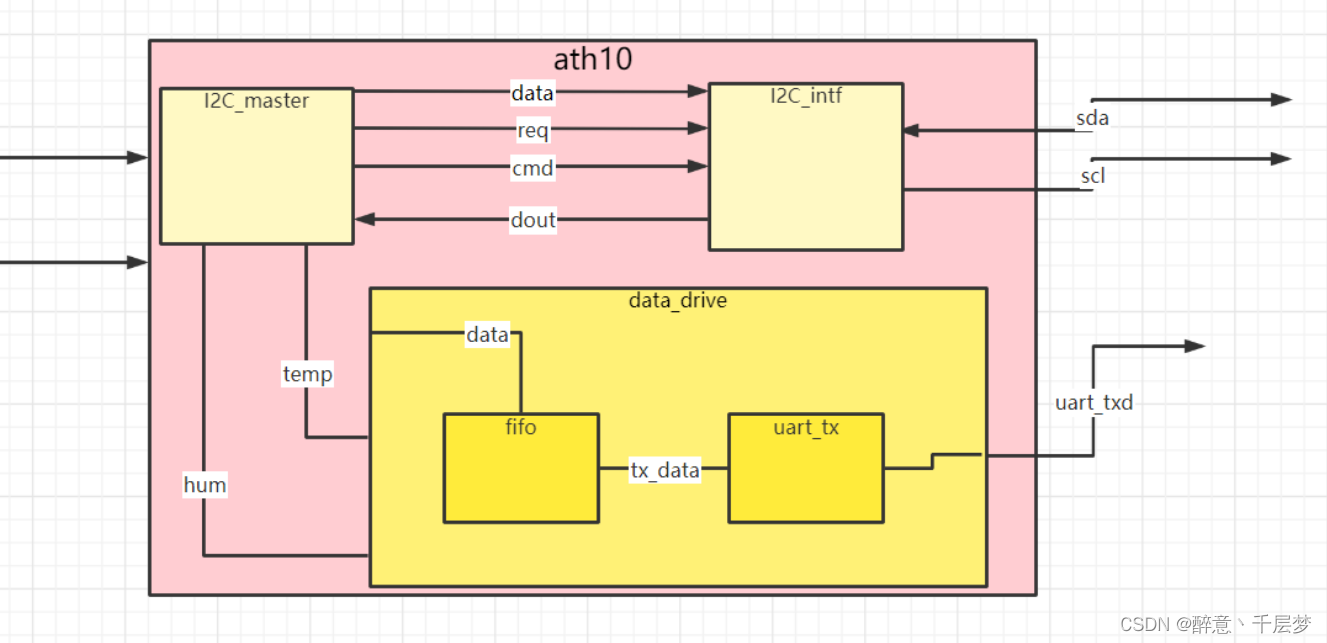
RTL视图

二、i2c接口
该传感器通过i2c协议进行通信。需要该接口实现i2c的数据收发。接口模块都是固定代码,不做讲解。
代码如下:
`include "param.v"
module i2c_intf(
input clk ,
input rst_n ,
input req ,
input [3:0] cmd ,
input [7:0] din ,
output [7:0] dout ,
output done ,
output slave_ack ,
output i2c_scl ,
input i2c_sda_i ,
output i2c_sda_o ,
output i2c_sda_oe
);
//状态机参数定义
localparam IDLE = 7'b000_0001,
START = 7'b000_0010,
WRITE = 7'b000_0100,
RACK = 7'b000_1000,
READ = 7'b001_0000,
SACK = 7'b010_0000,
STOP = 7'b100_0000;
//信号定义
reg [6:0] state_c ;
reg [6:0] state_n ;
reg [8:0] cnt_scl ;//产生i2c时钟
wire add_cnt_scl ;
wire end_cnt_scl ;
reg [3:0] cnt_bit ;//传输数据 bit计数器
wire add_cnt_bit ;
wire end_cnt_bit ;
reg [3:0] bit_num ;
reg scl ;//输出寄存器
reg sda_out ;
reg sda_out_en ;
reg [7:0] rx_data ;
reg rx_ack ;
reg [3:0] command ;
reg [7:0] tx_data ;//发送数据
wire idle2start ;
wire idle2write ;
wire idle2read ;
wire start2write ;
wire start2read ;
wire write2rack ;
wire read2sack ;
wire rack2stop ;
wire sack2stop ;
wire rack2idle ;
wire sack2idle ;
wire stop2idle ;
//状态机
always @(posedge clk or negedge rst_n) begin
if (rst_n==0) begin
state_c <= IDLE ;
end
else begin
state_c <= state_n;
end
end
always @(*) begin
case(state_c)
IDLE :begin
if(idle2start)
state_n = START ;
else if(idle2write)
state_n = WRITE ;
else if(idle2read)
state_n = READ ;
else
state_n = state_c ;
end
START :begin
if(start2write)
state_n = WRITE ;
else if(start2read)
state_n = READ ;
else
state_n = state_c ;
end
WRITE :begin
if(write2rack)
state_n = RACK ;
else
state_n = state_c ;
end
RACK :begin
if(rack2stop)
state_n = STOP ;
else if(rack2idle)
state_n = IDLE ;
else
state_n = state_c ;
end
READ :begin
if(read2sack)
state_n = SACK ;
else
state_n = state_c ;
end
SACK :begin
if(sack2stop)
state_n = STOP ;
else if(sack2idle)
state_n = IDLE ;
else
state_n = state_c ;
end
STOP :begin
if(stop2idle)
state_n = IDLE ;
else
state_n = state_c ;
end
default : state_n = IDLE ;
endcase
end
assign idle2start = state_c==IDLE && (req && (cmd&`CMD_START));
assign idle2write = state_c==IDLE && (req && (cmd&`CMD_WRITE));
assign idle2read = state_c==IDLE && (req && (cmd&`CMD_READ ));
assign start2write = state_c==START && (end_cnt_bit && (command&`CMD_WRITE));
assign start2read = state_c==START && (end_cnt_bit && (command&`CMD_READ ));
assign write2rack = state_c==WRITE && (end_cnt_bit);
assign read2sack = state_c==READ && (end_cnt_bit);
assign rack2stop = state_c==RACK && (end_cnt_bit && (command&`CMD_STOP ));
assign sack2stop = state_c==SACK && (end_cnt_bit && (command&`CMD_STOP ));
assign rack2idle = state_c==RACK && (end_cnt_bit && (command&`CMD_STOP ) == 0);
assign sack2idle = state_c==SACK && (end_cnt_bit && (command&`CMD_STOP ) == 0);
assign stop2idle = state_c==STOP && (end_cnt_bit );
//计数器
always @(posedge clk or negedge rst_n) begin
if (rst_n==0) begin
cnt_scl <= 0;
end
else if(add_cnt_scl) begin
if(end_cnt_scl)
cnt_scl <= 0;
else
cnt_scl <= cnt_scl+1 ;
end
end
assign add_cnt_scl = (state_c != IDLE);
assign end_cnt_scl = add_cnt_scl && cnt_scl == (`SCL_PERIOD)-1 ;
always @(posedge clk or negedge rst_n) begin
if (rst_n==0) begin
cnt_bit <= 0;
end
else if(add_cnt_bit) begin
if(end_cnt_bit)
cnt_bit <= 0;
else
cnt_bit <= cnt_bit+1 ;
end
end
assign add_cnt_bit = (end_cnt_scl);
assign end_cnt_bit = add_cnt_bit && cnt_bit == (bit_num)-1 ;
always @(*)begin
if(state_c == WRITE | state_c == READ) begin
bit_num = 8;
end
else begin
bit_num = 1;
end
end
//command
always @(posedge clk or negedge rst_n)begin
if(~rst_n)begin
command <= 0;
end
else if(req)begin
command <= cmd;
end
end
//tx_data
always @(posedge clk or negedge rst_n)begin
if(~rst_n)begin
tx_data <= 0;
end
else if(req)begin
tx_data <= din;
end
end
//scl
always @(posedge clk or negedge rst_n)begin
if(~rst_n)begin
scl <= 1'b1;
end
else if(idle2start | idle2write | idle2read)begin//开始发送时,拉低
scl <= 1'b0;
end
else if(add_cnt_scl && cnt_scl == `SCL_HALF-1)begin
scl <= 1'b1;
end
else if(end_cnt_scl && ~stop2idle)begin
scl <= 1'b0;
end
end
//sda_out
always @(posedge clk or negedge rst_n)begin
if(~rst_n)begin
sda_out <= 1'b1;
end
else if(state_c == START)begin //发起始位
if(cnt_scl == `LOW_HLAF)begin //时钟低电平时拉高sda总线
sda_out <= 1'b1;
end
else if(cnt_scl == `HIGH_HALF)begin //时钟高电平时拉低sda总线
sda_out <= 1'b0; //保证从机能检测到起始位
end
end
else if(state_c == WRITE && cnt_scl == `LOW_HLAF)begin //scl低电平时发送数据 并串转换
sda_out <= tx_data[7-cnt_bit];
end
else if(state_c == SACK && cnt_scl == `LOW_HLAF)begin //发应答位
sda_out <= (command&`CMD_STOP)?1'b1:1'b0;
end
else if(state_c == STOP)begin //发停止位
if(cnt_scl == `LOW_HLAF)begin //时钟低电平时拉低sda总线
sda_out <= 1'b0;
end
else if(cnt_scl == `HIGH_HALF)begin //时钟高电平时拉高sda总线
sda_out <= 1'b1; //保证从机能检测到停止位
end
end
end
//sda_out_en 总线输出数据使能
always @(posedge clk or negedge rst_n)begin
if(~rst_n)begin
sda_out_en <= 1'b0;
end
else if(idle2start | idle2write | read2sack | rack2stop)begin
sda_out_en <= 1'b1;
end
else if(idle2read | start2read | write2rack | stop2idle)begin
sda_out_en <= 1'b0;
end
end
//rx_data 接收读入的数据
always @(posedge clk or negedge rst_n)begin
if(~rst_n)begin
rx_data <= 0;
end
else if(state_c == READ && cnt_scl == `HIGH_HALF)begin
rx_data[7-cnt_bit] <= i2c_sda_i; //串并转换
end
end
//rx_ack
always @(posedge clk or negedge rst_n)begin
if(~rst_n)begin
rx_ack <= 1'b1;
end
else if(state_c == RACK && cnt_scl == `HIGH_HALF)begin
rx_ack <= i2c_sda_i;
end
end
//输出信号
assign i2c_scl = scl ;
assign i2c_sda_o = sda_out ;
assign i2c_sda_oe = sda_out_en ;
assign dout = rx_data;
assign done = rack2idle | sack2idle | stop2idle;
assign slave_ack = rx_ack;
endmodule
三、i2c控制模块
该模块负责采集AHT10传感器的数据,并把采集到的数据输出到数据处理模块。
状态机设计
状态转移图
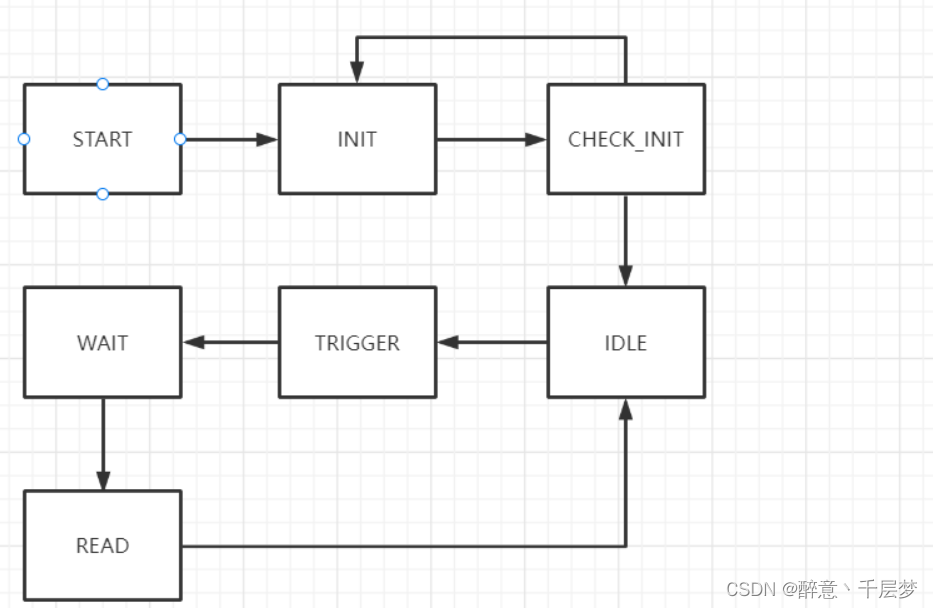
START
上电、复位后默认状态。根据手册信息可知,等待40ms后跳转到init初始化状态
INIT
根据手册信息可知,等待40ms后需要进行初始化,在该状态控制i2c接口发送对应命令即可.发送完毕进入CHECK_INIT状态.
CHECK_INIT
发送玩初始化命令后,通过发送命令0x71检测是否初始化成功,如果失败则回到INIT状态,成功则进入IDLE状态
IDLE
空闲状态,当传感器初始化完成后会进入空闲状态,在空闲状态持续0.5s后将会进入TRIGGER发送测量命令状态
TRIGGER
通过i2c接口发送如下命令即可,发送完毕进入WAIT状态

WAIT
等待80ms后进入READ状态

READ
通过i2c接口接受传感器发送的六个字节数据,根据状态为判断数据是否有效,有效则进行输出,无效则忽略。读取完毕后回到IDLE状态。
代码
`include "param.v"
module i2c_master (
input clk ,
input rst_n ,
input din_vld ,
output req ,
output [3:0] cmd ,
output [7:0] data ,
input done , //传输完成标志
input [7:0] rd_data ,
output [ 19:0 ] hum_data ,//湿度
output [ 19:0 ] temp_data ,//温度
output dout_vld
);
//状态机参数
localparam START = 7'b000_0001 , //等待40ms
INIT = 7'b000_0010 , //初始化
CHECK_INIT = 7'b000_0100 , //检测是否初始化完成
IDLE = 7'b000_1000 , //空闲
TRIGGER = 7'b001_0000 , //触发测量
WAIT = 7'b010_0000 , //等待80ms测量完成
READ = 7'b100_0000 ; //读取温湿度
parameter DELAY_40MS = 200_0000;//40ms
parameter DELAY_80MS = 400_0000;//80ms
parameter DELAY_500MS = 2500_0000;//0.5s
//信号定义
reg [7:0] state_c ;
reg [7:0] state_n ;
reg [2:0] cnt_byte ;//数据传输 字节计数器
wire add_cnt_byte ;
wire end_cnt_byte ;
reg tx_req ;//请求
reg [3:0] tx_cmd ;
reg [7:0] tx_data ;
reg [ 47:0 ] read_data ;
reg [ 27:0 ] cnt ;//40ms 80ms计数器
wire add_cnt ;
wire end_cnt ;
reg finish_init ;
wire start_2_init ;//等待40ms后进入初始化
wire init_2_check ;//检查是否初始化成功
wire check_2_idle ;//初始化完成进入空闲
wire check_2_init ;//初始化失败重新初始化
wire idle_2_trigger ;//发送读取温湿度指令
wire trigger_2_wait ;//等待转换完成
wire wait_2_read ;//读取温湿度
wire read_2_idle ;//读取完毕进入空闲
assign start_2_init = state_c == START && (end_cnt);
assign init_2_check = state_c == INIT && (end_cnt_byte);
assign check_2_idle = state_c == CHECK_INIT && (finish_init);
assign check_2_init = state_c == CHECK_INIT && (~finish_init);
assign idle_2_trigger = state_c == IDLE && (end_cnt);
assign trigger_2_wait = state_c == TRIGGER && (end_cnt_byte);
assign wait_2_read = state_c == WAIT && (end_cnt);
assign read_2_idle = state_c == READ && (end_cnt_byte);
//状态机设计
always @(posedge clk or negedge rst_n) begin
if (rst_n==0) begin
state_c <= START ;
end
else begin
state_c <= state_n;
end
end
//状态跳转
always @(*) begin
case(state_c)
START :begin
if(start_2_init)
state_n = INIT ;
else
state_n = state_c ;
end
INIT :begin
if(init_2_check)
state_n = IDLE ;
else
state_n = state_c ;
end
CHECK_INIT :begin
if(check_2_idle)
state_n = IDLE ;
else if(check_2_init) begin
state_n = INIT;
end
else
state_n = state_c ;
end
IDLE :begin
if(idle_2_trigger)
state_n = TRIGGER ;
else
state_n = state_c ;
end
TRIGGER :begin
if(trigger_2_wait)
state_n = WAIT ;
else
state_n = state_c ;
end
WAIT :begin
if(wait_2_read)
state_n = READ ;
else
state_n = state_c ;
end
READ :begin
if(read_2_idle)
state_n = IDLE ;
else
state_n = state_c ;
end
default : state_n = START ;
endcase
end
reg [ 24:0 ] delay ;
//延时数据寄存器
always @(posedge clk or negedge rst_n) begin
if(!rst_n) begin
delay <= DELAY_40MS;
end
else if(state_c == START) begin
delay <= DELAY_40MS;
end
else if(state_c == WAIT) begin
delay <= DELAY_80MS;
end
else if(state_c == IDLE) begin
delay <= DELAY_500MS;
end
end
//延时计数器
always @( posedge clk or negedge rst_n ) begin
if ( !rst_n ) begin
cnt <= 0;
end
else if ( add_cnt ) begin
if ( end_cnt ) begin
cnt <= 0;
end
else begin
cnt <= cnt + 1;
end
end
else begin
cnt <= 0;
end
end
assign add_cnt = state_c == START || state_c == WAIT || state_c == IDLE;
assign end_cnt = cnt == delay - 1 && add_cnt;
//字节计数器
always @(posedge clk or negedge rst_n) begin
if(!rst_n)begin
cnt_byte <= 0;
end
else if(add_cnt_byte) begin
if(end_cnt_byte) begin
cnt_byte <= 0;
end
else
cnt_byte <= cnt_byte + 1;
end
end
assign add_cnt_byte = (state_c == INIT || state_c == CHECK_INIT ||state_c == TRIGGER || state_c == READ) && done;
assign end_cnt_byte = cnt_byte == (state_c == READ?6:3) && add_cnt_byte;
/*必须使用组合,接口模块done信号延后一个时钟,req等数据需提前
根据当前状态控制i2c接口发送数据*/
always @(*)begin
case (state_c)
INIT :
case(cnt_byte)
0 :TX(1'b1,{`CMD_START | `CMD_WRITE},{`I2C_ADR,1'b0});//发起始位、地址
1 :TX(1'b1, `CMD_WRITE ,`CMD_INIT); //发数据,结束位
2 :TX(1'b1,`CMD_WRITE ,8'b000_1000); //发数据,结束位
3 :TX(1'b1,{`CMD_WRITE | `CMD_STOP} ,8'b0000_0000); //发数据,结束位
default :TX(1'b0,tx_cmd,tx_data);
endcase
CHECK_INIT:
case(cnt_byte)
0 :TX(1'b1,{`CMD_START | `CMD_WRITE},{`I2C_ADR,1'b0});//发起始位、写控制字
1 :TX(1'b1,`CMD_WRITE ,`CMD_CHECK); //发数据
2 :TX(1'b1,{`CMD_START | `CMD_WRITE},{`I2C_ADR,1'b1});//发起始位、读控制字
3 :TX(1'b1,{`CMD_READ | `CMD_STOP},0); //最后一个字节时 读数据、发停止位
default :TX(1'b0,tx_cmd,tx_data);
endcase
TRIGGER:
case(cnt_byte)
0 :TX(1'b1,{`CMD_START | `CMD_WRITE},{`I2C_ADR,1'b0});//发起始位、写控制字
1 :TX(1'b1,`CMD_WRITE ,`CMD_TRIGGER); //发数据
2 :TX(1'b1,`CMD_WRITE ,`DATA_0); //发数据
3 :TX(1'b1,{`CMD_WRITE | `CMD_STOP},`DATA_1); //最后一个字节时、发停止位
default :TX(1'b0,tx_cmd,tx_data);
endcase
READ :
case(cnt_byte)
0 :TX(1'b1,{`CMD_START | `CMD_WRITE},{`I2C_ADR,1'b1});//发起始位、写控制字
1 :TX(1'b1,`CMD_READ ,0); //读数据
2 :TX(1'b1,`CMD_READ ,0); //读数据
3 :TX(1'b1,`CMD_READ ,0); //读数据
4 :TX(1'b1,`CMD_READ ,0); //读数据
5 :TX(1'b1,`CMD_READ ,0); //读数据
6 :TX(1'b1,{`CMD_READ | `CMD_STOP},0);
default :TX(1'b0,tx_cmd,tx_data);
endcase
default: TX(1'b0,0,0);
endcase
end
//初始化完成标志
always @(posedge clk or negedge rst_n) begin
if(!rst_n) begin
finish_init <= 0;
end
else if(state_c == CHECK_INIT && done && rd_data[3]) begin
finish_init <= 1;
end
end
//i2c 接口返回数据
always @(posedge clk or negedge rst_n) begin
if(!rst_n) begin
read_data <= 0;
end
else if(state_c == READ && cnt_byte >0 && done) begin
read_data <= {read_data[39:0],rd_data};
end
end
//用task发送请求、命令、数据(地址+数据)
task TX;
input req ;
input [3:0] command ;
input [7:0] data ;
begin
tx_req = req;
tx_cmd = command;
tx_data = data;
end
endtask
//输出
assign req = tx_req ;
assign cmd = tx_cmd ;
assign data = tx_data;
assign hum_data = read_data[39:20];
assign temp_data = read_data[19:0];
assign dout_vld = read_2_idle;
endmodule //camera_config_ctrl
串口模块代码
module uart_tx(input wire clk,
input wire rst_n,
input wire tx_enable, // 发送使能
input wire [ 07:0 ] data_in, // 需要发送的数据
input wire [ 19:0 ] tx_bps, // 发送的波特率
output wire data, // 发送的数据
output wire tx_done);
localparam MAX_BIT = 10;
reg [ 09:0 ] data_r ; // 数据寄存器
reg [ 12:0 ] cnt_bps ; // 波特率计数器
reg [ 03:0 ] cnt_bit ; // 数据位计数器
wire [ 12:0 ] max_bps ; // 波特率对应频率
wire flag_clear_cnt_bps ; // 计数器归零
wire flag_add_cnt_bit ; // 计数器+1
wire flag_clear_cnt_bit ;
reg flag_send_data ; //发送数据标志
//输入数据寄存
always @(posedge clk or negedge rst_n) begin
if(!rst_n) begin
data_r <= 10'b0;
end
else if(tx_enable) begin
data_r <={1'b1, data_in, 1'b0};
end
end
// 波特率计数器
always @( posedge clk or negedge rst_n ) begin
if ( !rst_n ) begin
cnt_bps <= 0;
end
else if ( flag_send_data ) begin
if ( flag_clear_cnt_bps ) begin
cnt_bps <= 0;
end
else begin
cnt_bps <= cnt_bps + 1;
end
end
else begin
cnt_bps <= 0;
end
end
assign flag_clear_cnt_bps = cnt_bps >= max_bps -1;
assign max_bps = 50_000_000 / tx_bps;
// 数据位计数器
always @( posedge clk or negedge rst_n ) begin
if ( !rst_n ) begin
cnt_bit <= 0;
end
else if ( flag_send_data ) begin
if ( flag_clear_cnt_bit ) begin
cnt_bit <= 0;
end
else if ( flag_add_cnt_bit )begin
cnt_bit <= cnt_bit + 1;
end
else begin
cnt_bit <= cnt_bit;
end
end
else begin
cnt_bit <= 0;
end
end
assign flag_add_cnt_bit = flag_clear_cnt_bps;
assign flag_clear_cnt_bit = cnt_bit >= MAX_BIT - 1 && flag_add_cnt_bit ;
//发送数据标志
always @(posedge clk or negedge rst_n) begin
if(!rst_n) begin
flag_send_data <= 0;
end
else if(tx_enable) begin
flag_send_data <= 1;
end
else if(flag_clear_cnt_bit) begin
flag_send_data <= 0;
end
else begin
flag_send_data <= flag_send_data;
end
end
//发送数据
assign data = flag_send_data ? data_r[cnt_bit]:1;
assign tx_done = ~flag_send_data ;
//发送状态
// always @(*) begin
// if(!rst_n) begin
// tx_done = 1;
// end
// else if(flag_clear_cnt_bit) begin
// tx_done = 1;
// end
// else if(flag_send_data) begin
// tx_done = 0;
// end
// else begin
// tx_done = tx_done;
// end
// end
endmodule
四、数据处理模块
根据手册信息可以得到数据处理的公式
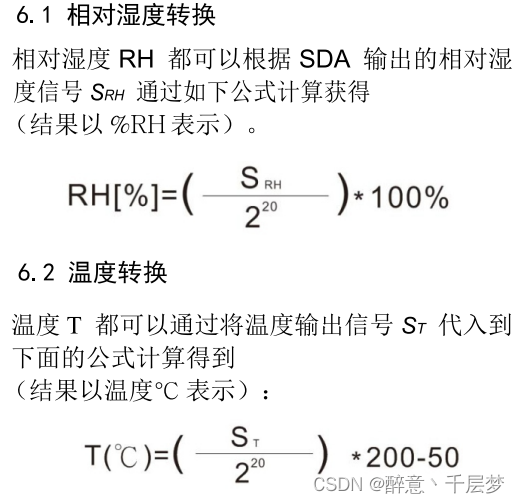
但是按照公式进行转换数据并不正确,考虑到数据涉及到小数运算,先把测量到的数据进行左移8位转为整数,再套入公式可以得到较为合理的数据。最终的公式为:

考虑需要一位小数,则先把原数据进行扩大10倍后再进行上述运算。最终处理后得到的数据我们只取后三位代表十位、个位和小数位。
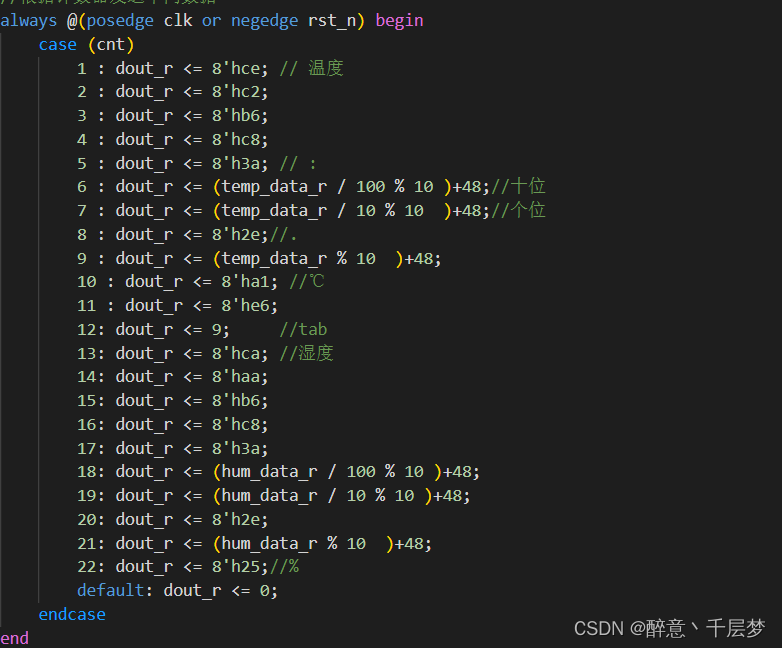
串口
串口数据发送必须以字节为单位,则需要把处理完得到数据一位一位的取出来再转为ascii码进行发送。按如下格式进行数据发送。为了保证发送正确,这里添加一个fifo进行缓存需要发送的数据,让串口模块每次都去取fifo里面的数据进行发送。
代码
module data_drive (
input wire clk,
input wire rst_n,
input wire din_vld,
input wire [ 19:0 ] temp_data,
input wire [ 19:0 ] hum_data,
output wire tx_data
);
reg send_flag ;
reg [ 19:0 ] temp_data_r ;
reg [ 19:0 ] hum_data_r ;
reg [ 7:0 ] dout_r ;
wire [ 15:0 ] tmep ;
wire [ 15:0 ] hum ;
reg [ 5:0 ] cnt ;
wire add_cnt ;
wire end_cnt ;
wire rdreq ;
wire wrreq ;
wire empty ;
wire full ;
wire tx_done ;
wire [ 7:0 ] q ;
assign rdreq = tx_done && ~empty;
assign wrreq = ~full && send_flag && cnt > 0;
//串口模块
uart_tx u_uart_tx(
.clk ( clk ),
.rst_n ( rst_n ),
.tx_enable ( rdreq ),
.data_in ( q ),
.tx_bps ( 115200 ),
.data ( tx_data ),
.tx_done ( tx_done )
);
//用于缓存通过串口发送的数据
fifo tx_fifo_inst (
.aclr ( ~rst_n ),
.clock ( clk ),
.data ( dout_r ),
.rdreq ( rdreq ),
.wrreq ( wrreq ),
.empty ( empty ),
.full ( full ),
.q ( q ),
.usedw ( usedw_sig )
);
//温湿度数据寄存
always @(posedge clk or negedge rst_n) begin
if(!rst_n) begin
temp_data_r <= 0;
hum_data_r <= 0;
end
else if(din_vld) begin
temp_data_r <= (((temp_data*2000)>>12) - (500)); //扩大10倍
hum_data_r <= ((hum_data *1000) >> 12);
end
end
//数据处理标志
always @(posedge clk or negedge rst_n) begin
if(!rst_n) begin
send_flag <= 0;
end
else if(din_vld) begin
send_flag <= 1;
end
else if(end_cnt) begin
send_flag <= 0;
end
end
//计数器
always @( posedge clk or negedge rst_n ) begin
if ( !rst_n ) begin
cnt <= 0;
end
else if ( add_cnt ) begin
if ( end_cnt ) begin
cnt <= 0;
end
else begin
cnt <= cnt + 1;
end
end
end
assign add_cnt = send_flag;
assign end_cnt = add_cnt && cnt == 22;
// CE C2 B6 C8 CA AA B6 C8
//根据计数器发送不同数据
always @(posedge clk or negedge rst_n) begin
case (cnt)
1 : dout_r <= 8'hce; // 温度
2 : dout_r <= 8'hc2;
3 : dout_r <= 8'hb6;
4 : dout_r <= 8'hc8;
5 : dout_r <= 8'h3a; // :
6 : dout_r <= (temp_data_r / 100 % 10 )+48;//十位
7 : dout_r <= (temp_data_r / 10 % 10 )+48;//个位
8 : dout_r <= 8'h2e;//.
9 : dout_r <= (temp_data_r % 10 )+48;
10 : dout_r <= 8'ha1; //℃
11 : dout_r <= 8'he6;
12: dout_r <= 9; //tab
13: dout_r <= 8'hca; //湿度
14: dout_r <= 8'haa;
15: dout_r <= 8'hb6;
16: dout_r <= 8'hc8;
17: dout_r <= 8'h3a;
18: dout_r <= (hum_data_r / 100 % 10 )+48;
19: dout_r <= (hum_data_r / 10 % 10 )+48;
20: dout_r <= 8'h2e;
21: dout_r <= (hum_data_r % 10 )+48;
22: dout_r <= 8'h25;//%
default: dout_r <= 0;
endcase
end
endmodule //data_drive
五、仿真
testbench设计
通过模拟传感器回数据进行测试代码的逻辑正确与否
代码如下:
`timescale 1ns/1ps
module tb ();
reg clk;
reg rst_n;
wire sda ;
reg sda_i ;
aht10_top u_aht10_top(
.clk ( clk ),
.rst_n ( rst_n ),
.sda ( sda ),
.scl ( scl ),
.uart_txd ( uart_txd )
);
assign sda = u_aht10_top.i2c_sda_oe?1'bz:sda_i;
defparam u_aht10_top.u_i2c_master.DELAY_40MS = 400;
defparam u_aht10_top.u_i2c_master.DELAY_80MS = 800;
defparam u_aht10_top.u_i2c_master.DELAY_500MS = 5000;
localparam CLK_PERIOD = 20;
always #(CLK_PERIOD/2) clk=~clk;
reg [ 10:0 ] i ;
reg [ 10:0 ] j ;
initial begin
rst_n<=1'b0;
clk<=1'b0;
# CLK_PERIOD;
rst_n<=1;
@(posedge u_aht10_top.u_i2c_master.init_2_check); //初始化
for (i = 0; i<3 ; i = i+1 ) begin
@(posedge u_aht10_top.u_i2c_master.add_cnt_byte);
end
for (i = 0; i<9 ; i = i+1 ) begin //模拟初始化完成
@(posedge u_aht10_top.u_i2c_intf.add_cnt_bit)
if(i == 3)
sda_i = 1;
else if(i == 8)
sda_i = 0;
end
repeat(5) begin
@(posedge u_aht10_top.u_i2c_master.wait_2_read);//等待控制模块到达读取状态
@(posedge u_aht10_top.u_i2c_master.add_cnt_byte);
for (i = 0; i<6 ; i = i+1 ) begin//发送6个数据
@(posedge u_aht10_top.u_i2c_master.add_cnt_byte);
for (j = 0; j<9 ; j = j+1 ) begin//模拟从机回数据
@(posedge u_aht10_top.u_i2c_intf.end_cnt_scl)
if(j == 8)
sda_i = 0;
else
sda_i = {$random};
end
end
end
$stop;
end
endmodule
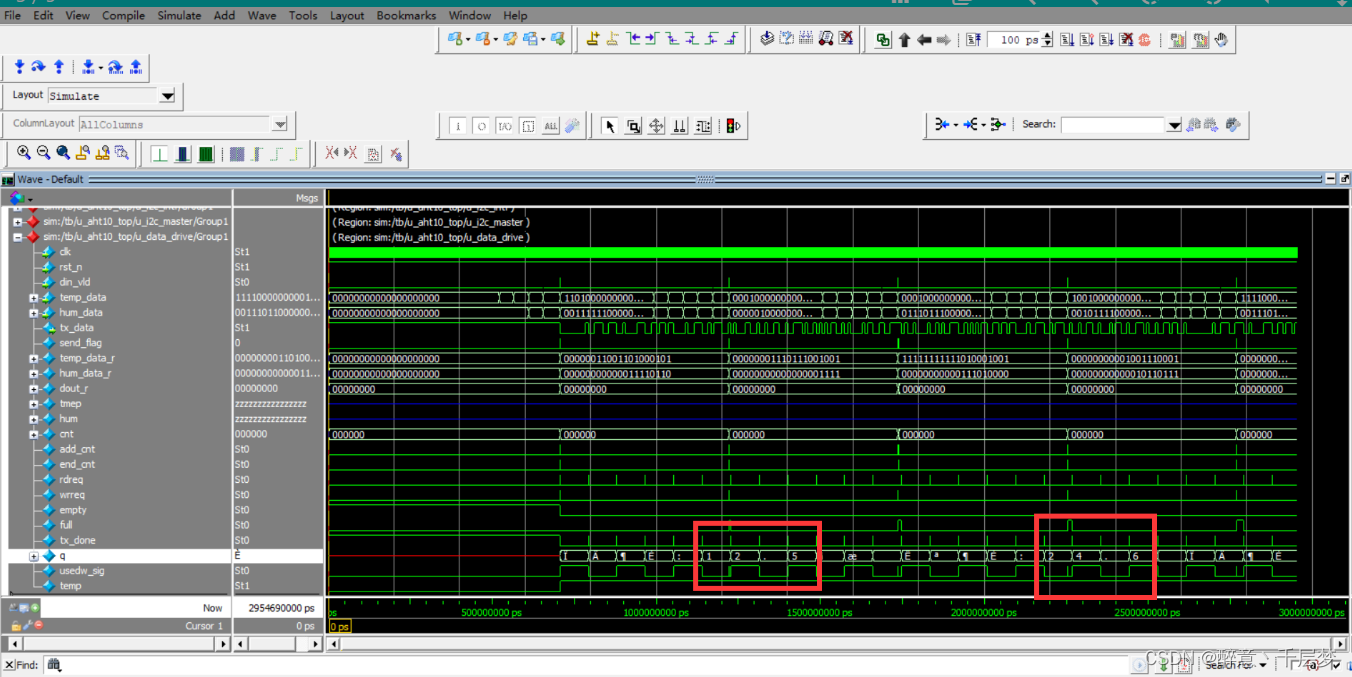
仿真波形
由于中文和部分特殊符号需要两位ascii码,故出现乱码,但是可以看到温湿度可以正常显示,通过随机数进行模拟,仅供参考。
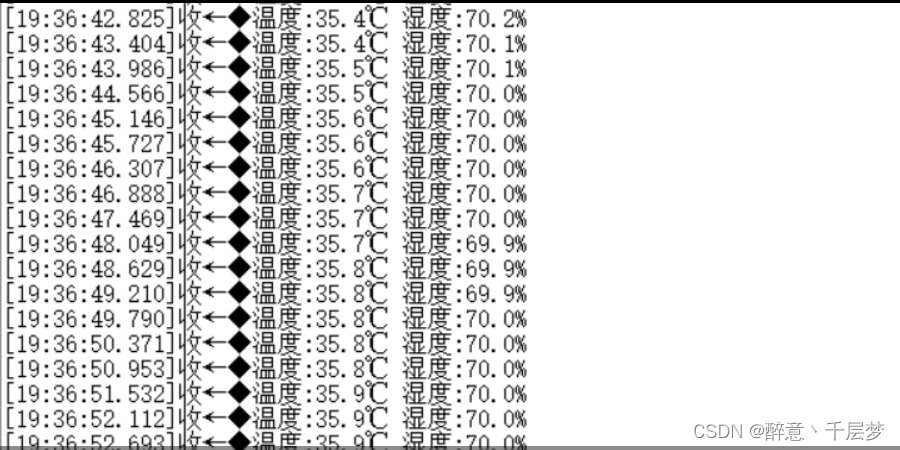
六、效果
七、源码
https://github.com/TangtangSix/AHT10