田昌源. 基于自适应事件触发控制的一般线性多智能体系统的一致性[D].青岛大学,2022.DOI:10.27262/d.cnki.gqdau.2022.002546.
文章目录
- 第五章 一般线性多智能体系统的自适应事件触发二分一致性
- 5.1 系统模型
- 5.2 自适应事件触发二分一致性
- 5.2.1 无领导一致性
- 5.2.2 领导-跟随一致性
- 5.3 数值仿真
- 程序代码:`main_ETC.m`,对应效果如下
- 程序代码:`main_couplingWeight_ETC.m`,对应效果如下
- Ref
第五章 一般线性多智能体系统的自适应事件触发二分一致性
5.1 系统模型
第
i
i
i 个智能体的动态方程为为
x
˙
i
=
A
x
i
(
t
)
+
B
u
i
(
t
)
(5-1)
\begin{aligned} \dot{x}_i &= A x_i (t) + B u_i(t) \end{aligned} \tag{5-1}
x˙i=Axi(t)+Bui(t)(5-1)
领导者为
x
˙
0
=
A
x
0
(
t
)
(5-2)
\begin{aligned} \dot{x}_0 &= A x_0 (t) \end{aligned} \tag{5-2}
x˙0=Ax0(t)(5-2)
5.2 自适应事件触发二分一致性
5.2.1 无领导一致性
在本节中,基于无领导的多智能体系统 (5-1),提出如下分布式自适应事件触发二分一致性协议
u
i
(
t
)
=
K
c
i
(
t
)
∑
j
∈
N
i
a
i
j
(
x
j
(
t
k
i
)
−
sgn
(
a
i
j
)
x
i
(
t
k
i
)
)
(5-3)
\begin{aligned} u_i(t) = K c_i(t) \sum_{j \in N_i} a_{ij} (x_j(t^i_k) - \text{sgn}(a_{ij}) x_i(t^i_k)) \end{aligned} \tag{5-3}
ui(t)=Kci(t)j∈Ni∑aij(xj(tki)−sgn(aij)xi(tki))(5-3)
c
˙
t
(
t
)
=
[
∑
j
∈
N
i
a
i
j
(
x
j
(
t
k
i
)
−
sgn
(
a
i
j
)
x
i
(
t
k
i
)
)
]
T
Γ
[
∑
j
∈
N
i
a
i
j
(
x
j
(
t
k
i
)
−
sgn
(
a
i
j
)
x
i
(
t
k
i
)
)
]
(5-4)
\begin{aligned} \dot{c}_t (t) &= [\sum_{j\in N_i} a_{ij} (x_j(t^i_k) - \text{sgn}(a_{ij}) x_i(t^i_k))]^\text{T} \Gamma [\sum_{j\in N_i} a_{ij} (x_j(t^i_k) - \text{sgn}(a_{ij}) x_i(t^i_k))] \end{aligned} \tag{5-4}
c˙t(t)=[j∈Ni∑aij(xj(tki)−sgn(aij)xi(tki))]TΓ[j∈Ni∑aij(xj(tki)−sgn(aij)xi(tki))](5-4)
其中
t
k
i
\red{t^i_k}
tki 表示智能体
i
i
i 的第
k
k
k 个事件触发时刻且
t
0
i
=
0
t^i_0 = 0
t0i=0,
K
∈
R
m
×
n
\red{K} \in \R^{m\times n}
K∈Rm×n 和
Γ
∈
R
m
×
n
\red{\Gamma} \in \R^{m\times n}
Γ∈Rm×n 是反馈增益矩阵,
c
i
(
t
)
\red{c_i(t)}
ci(t) 表示节点
i
i
i 的时变耦合权值且
c
i
(
0
)
>
0
c_i(0)>0
ci(0)>0。
对每一个智能体,引入辅助变量
η
i
(
t
)
\eta_i(t)
ηi(t),设计如下动态事件触发函数
η
˙
i
(
t
)
=
−
ρ
i
η
i
(
t
)
+
v
i
{
1
4
∑
j
∈
N
i
a
i
j
(
x
~
i
(
t
)
−
x
~
j
(
t
)
)
T
Γ
(
(
x
~
i
(
t
)
−
x
~
j
(
t
)
)
−
∑
j
∈
N
i
(
1
+
σ
c
i
j
(
t
)
)
a
i
j
e
i
T
Γ
e
i
(
t
)
}
(4-7)
\begin{aligned} \dot{\eta}_i(t) &= - \rho_i \eta_i(t) + v_i \{ \frac{1}{4} \sum_{j\in N_i} a_{ij} (\tilde{x}_i(t) - \tilde{x}_j(t) )^\text{T} \Gamma ((\tilde{x}_i(t) - \tilde{x}_j(t)) \\ & - \sum_{j \in N_i} (1 + \sigma c_{ij}(t)) a_{ij} e_i^\text{T} \Gamma e_i(t) \} \end{aligned} \tag{4-7}
η˙i(t)=−ρiηi(t)+vi{41j∈Ni∑aij(x~i(t)−x~j(t))TΓ((x~i(t)−x~j(t))−j∈Ni∑(1+σcij(t))aijeiTΓei(t)}(4-7)
定义智能体的状态估计为
x
~
i
(
t
)
=
e
A
(
t
−
t
k
i
)
x
i
(
t
k
i
)
\tilde{x}_i(t) = \text{e}^{A(t-t^i_k)} x_i(t^i_k)
x~i(t)=eA(t−tki)xi(tki)
智能体的状态误差定义为
e
i
(
t
)
=
x
~
i
(
t
)
−
x
i
(
t
)
e_i(t) = \tilde{x}_i(t) - x_i(t)
ei(t)=x~i(t)−xi(t)
(5-11)
\begin{aligned} \end{aligned} \tag{5-11}
(5-11)
5.2.2 领导-跟随一致性
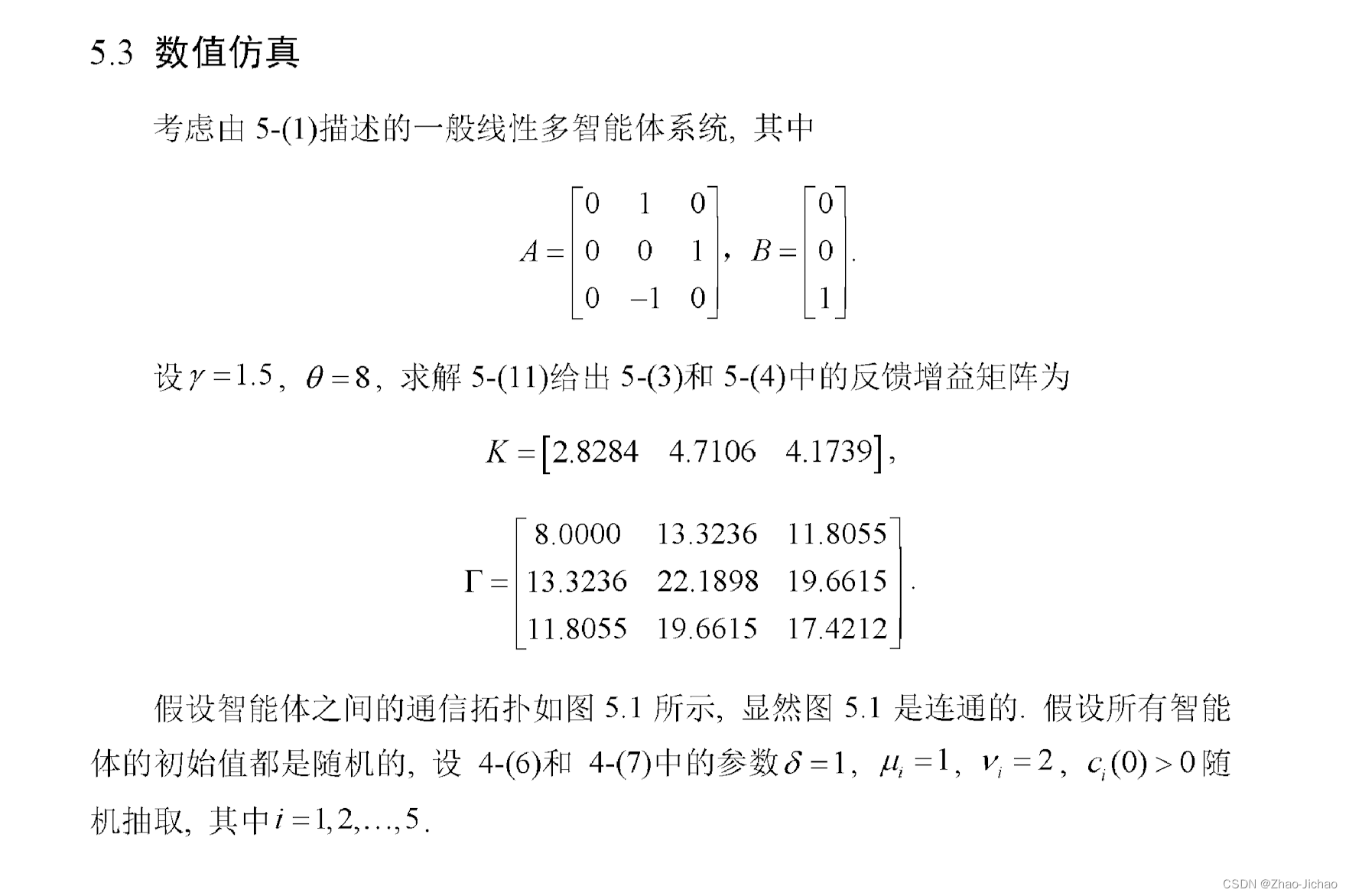
5.3 数值仿真
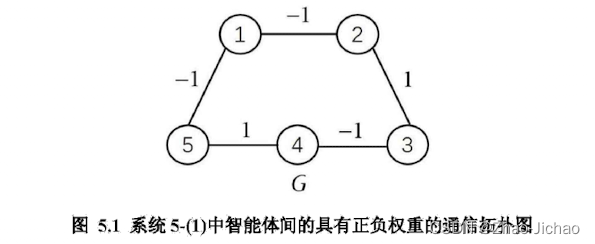
完全按照论文的描述出不来效果,针对原文有改动。
而且原文中矩阵
A
A
A 的维度是
3
×
3
3 \times 3
3×3,那么对应系统状态也应该有三个维度,不知道为什么作者只显示了两个维度的图像。
当然,我将第三个维度给补充出来了。
程序代码:main_ETC.m,对应效果如下



程序代码:main_couplingWeight_ETC.m,对应效果如下




Ref
需要程序代码可加+V:Zhao-Jichao

本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)