上篇文章我们介绍了URDF文件的导出,本文将继上文介绍安装完导出URDF文件后,如何在机器人操作系统(ROS)中显示,并且让它动起来。
目录
前言
RViz机器人模型可视化
launch启动RViz配置文件
Arbotix控制机器人模型运动
前言
ROS中提供了Gazebo与RViz两种仿真软件,本文将机器人模型在RViz仿真环境中可视化,同时利用Arbotix功能包使机器人完成圆周运动。
RViz机器人模型可视化
step1.创建工作空间
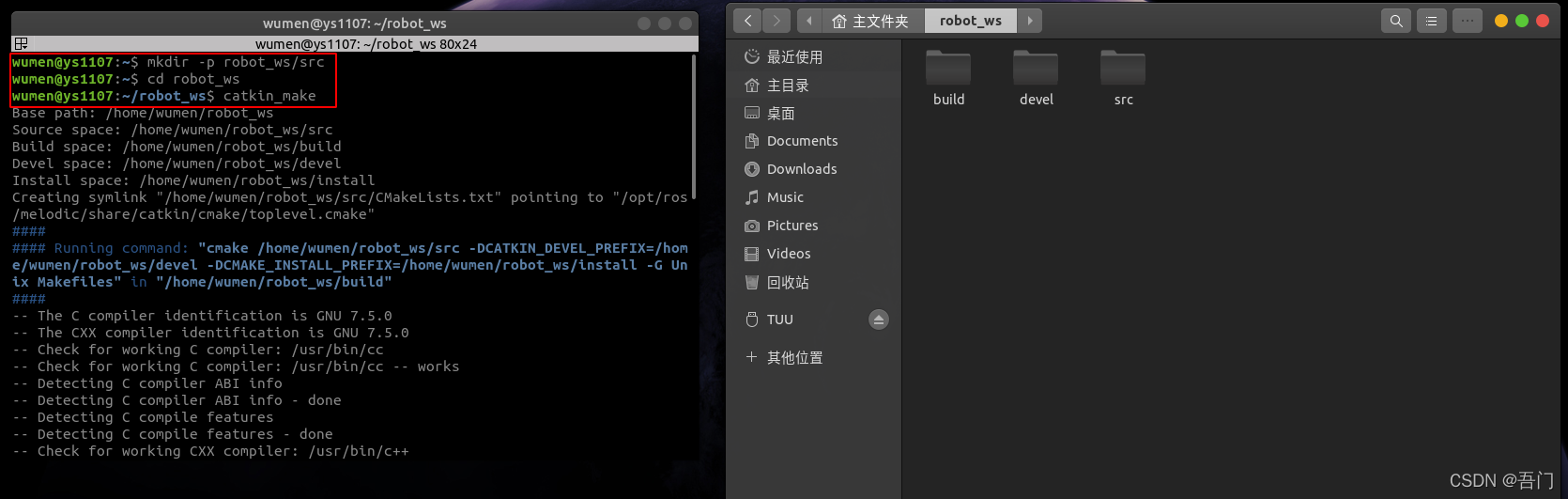
Ctrl+Alt+T打开终端分别输入:
mkdir -p helloworld/src
cd helloworld
catkin_make
其中robot_ws为我们命名的工作空间名称,catkin_make是一个编译命令,该编译命令会帮我们创建好我们所需的文件并输出若干日志,成功结果如下:
step2.创建功能包
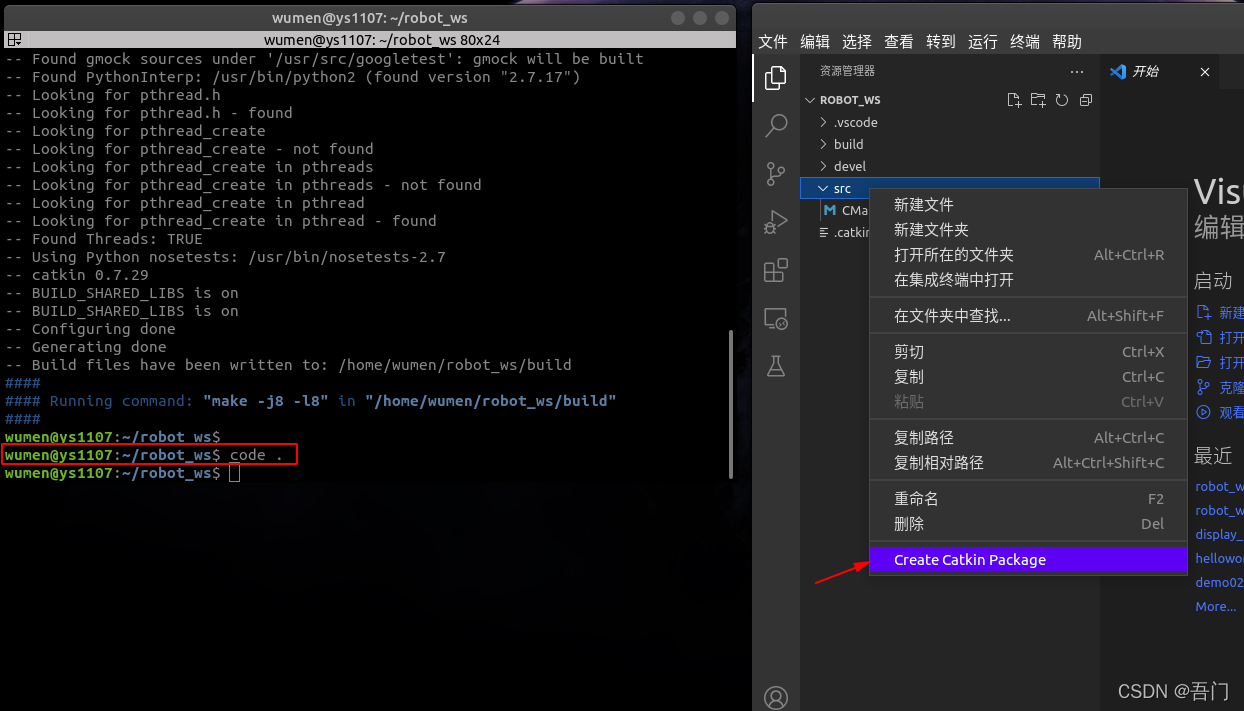
继续在该终端输入:【启动VS Code】
code .
右键一级src目录选择Create Catkin Package【创建功能包】
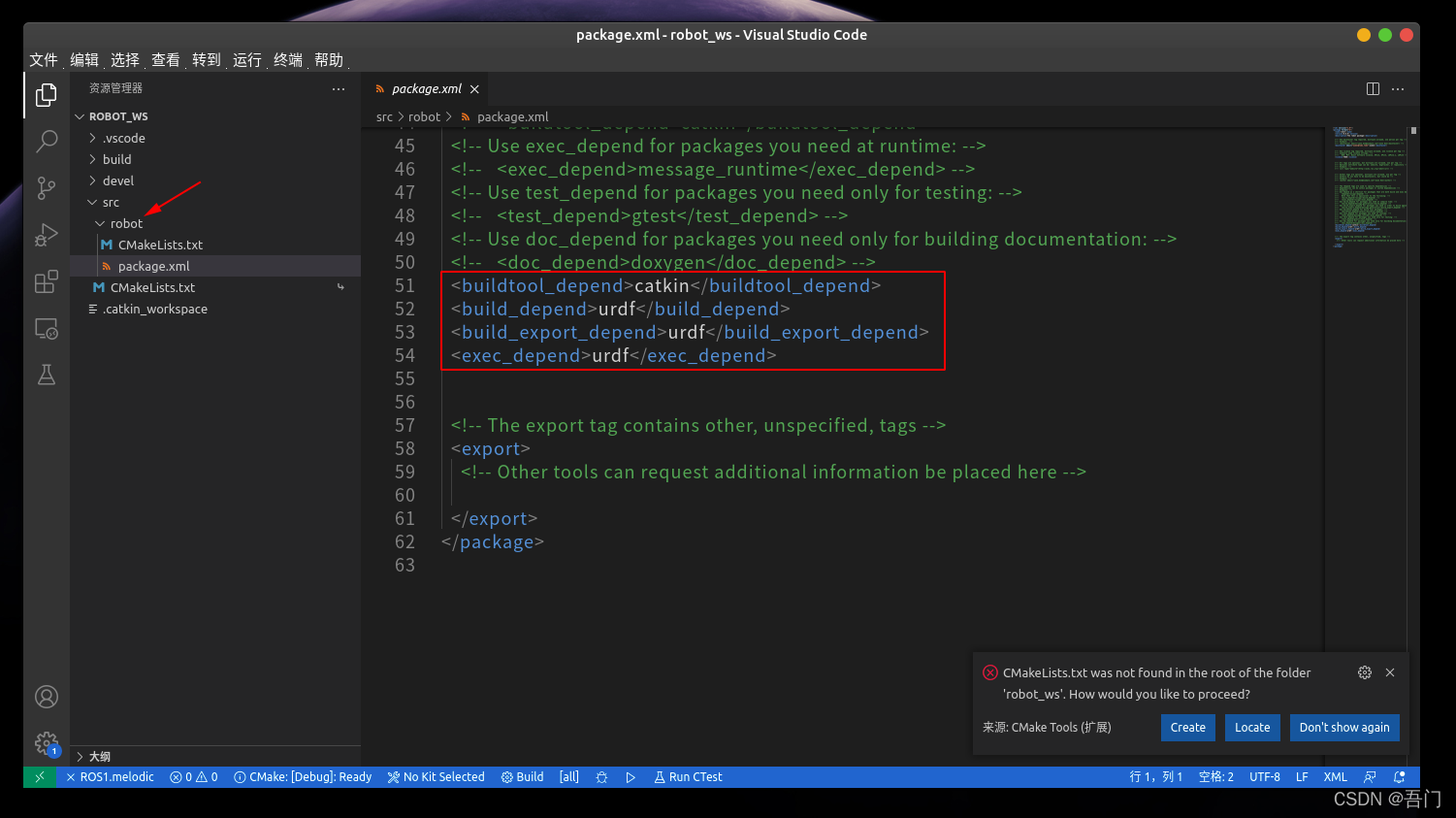
输入功能包名称【robot】再输入依赖【urdf xacro】创建结果如下
step1~2若出现问题请学习参考ROS入门教程(三)—— 用C++实现Hello world
step3.覆盖原功能包
将刚新建的robot功能包删除,替换为我们利用sw2urdf插件导出的robot功能包,如下所示:

成功结果如下,功能包中包含display.launch文件与robot.urdf文件:

为了美观可以将base_link ,left_wheel_link 与right_wheel_link的color标签进行修改,即将34行改为"1 1 1 1",将74行与132行改为"0.412 0.412 0.412 1",结果如下所示:【Ctrl+S保存】

step4.运行launch文件
按Ctrl+Shift+B执行编译命令,结果如下:

按Ctrl+Shift+~启动命令行分别输入:
source ./devel/setup.bash
roslaunch robot display.launch
结果如下所示:

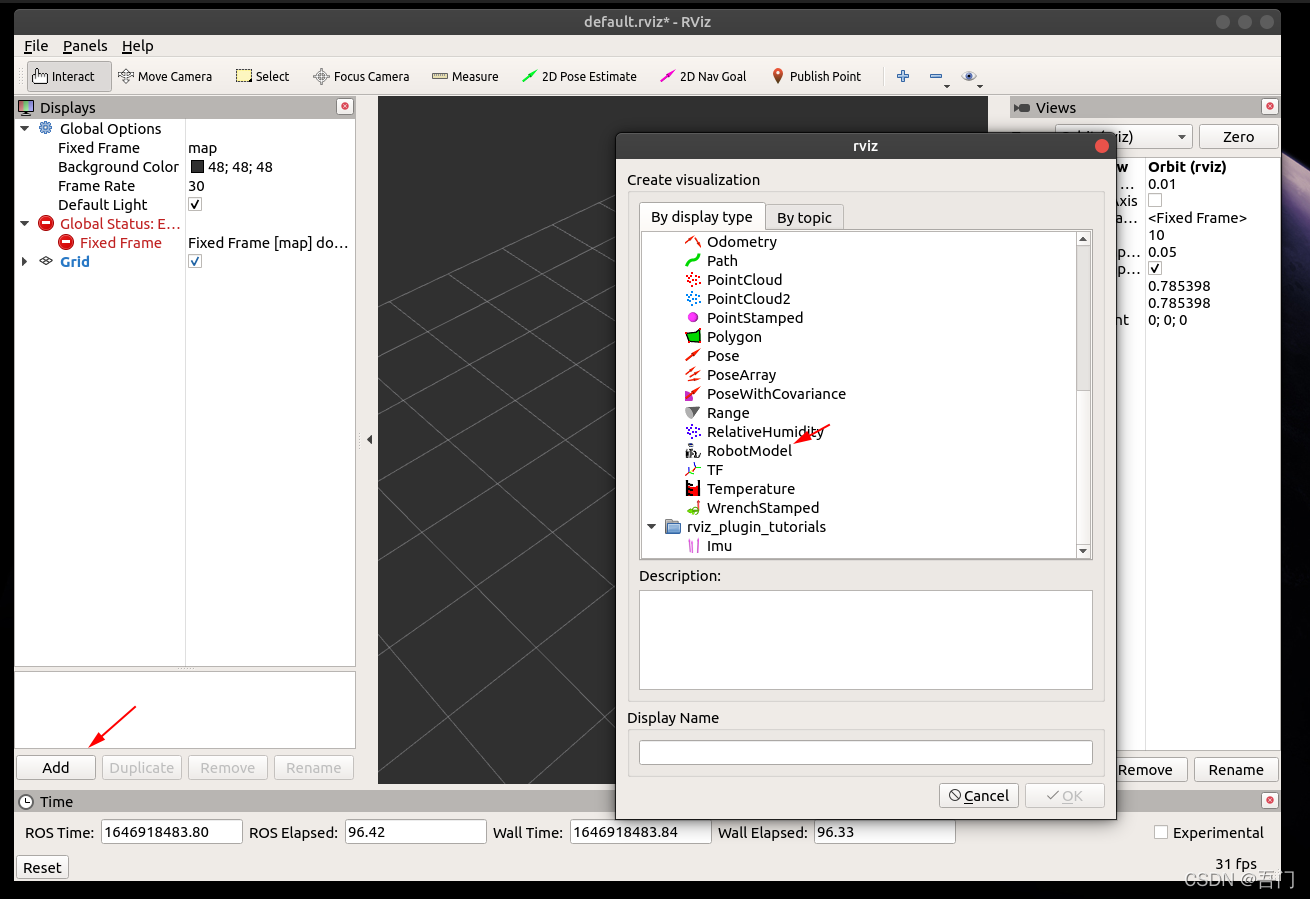
step5.在RViz中添加机器人模型
step6.修改大地坐标

这样我们就成功的在RViz中显示了我们的机器人模型,实现了机器人模型的可视化。
launch启动RViz配置文件
读者可以发现,每次打开RViz都需要添加机器人模型,重新设置大地坐标系这实在是过于复杂,RViz提供了配置文件以适用于不必每次打开都要重新配置RVi:
step1.保存配置文件
按Ctrl+Shift+S保存文件至robot功能包中的config文件夹中,命名为robot.rviz,如下所示:

step2.修改launch文件
将display.launch修改为以下:
<launch>
<arg
name="model" />
<param
name="robot_description"
textfile="$(find robot)/urdf/robot.urdf" />
<node
name="joint_state_publisher_gui"
pkg="joint_state_publisher_gui"
type="joint_state_publisher_gui" />
<node
name="robot_state_publisher"
pkg="robot_state_publisher"
type="robot_state_publisher" />
<node
name="rviz"
pkg="rviz"
type="rviz"
args="-d $(find robot)/config/robot.rviz" />
</launch>
这样每次运行该launch文件去启动RViz时就无需添加机器人模型与修改大地坐标了。
Arbotix控制机器人模型运动
step1.安装Arbotix功能包
按Ctrl+Alt+T打开终端输入:
sudo apt install ros-melodic-arbotix
step2.配置yaml文件
在robot功能包下config文件夹中新建文件robot.yaml输入以下:
# 该文件是控制器配置,一个机器人模型可能有多个控制器,比如: 底盘、机械臂、夹持器(机械手)....
# 因此,根 name 是 controller
controllers: {
# 单控制器设置
base_controller: {
#类型: 差速控制器
type: diff_controller,
#参考坐标
base_frame_id: base_footprint,
#两个轮子之间的间距
base_width: 0.2,
#控制频率
ticks_meter: 2000,
#PID控制参数,使机器人车轮快速达到预期速度
Kp: 12,
Kd: 12,
Ki: 0,
Ko: 50,
#加速限制
accel_limit: 1.0
}
}
结果如下所示:

step3.修改URDF与launch文件
将robot功能包下urdf文件夹中的robot.urdf修改为以下:
<?xml version="1.0" encoding="utf-8"?>
<!-- This URDF was automatically created by SolidWorks to URDF Exporter! Originally created by Stephen Brawner (brawner@gmail.com)
Commit Version: 1.6.0-4-g7f85cfe Build Version: 1.6.7995.38578
For more information, please see http://wiki.ros.org/sw_urdf_exporter -->
<robot
name="robot">
<link
name="base_footprint">
<visual>
<geometry>
<sphere
radius="0.001" />
</geometry>
<material
name="">
<color
rgba="0 0 0 0" />
</material>
</visual>
</link>
<link
name="base_link">
<inertial>
<origin
xyz="0.00274864430655652 -2.24752503383601E-12 -0.000346282886867658"
rpy="0 0 0" />
<mass
value="0.778495474667087" />
<inertia
ixx="0.00463138328383945"
ixy="1.02152303406231E-11"
ixz="1.71833341358258E-06"
iyy="0.00512425828608217"
iyz="4.71562842897777E-15"
izz="0.00973908576728839" />
</inertial>
<visual>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://robot/meshes/base_link.STL" />
</geometry>
<material
name="">
<color
rgba="1 1 1 1" />
</material>
</visual>
<collision>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://robot/meshes/base_link.STL" />
</geometry>
</collision>
</link>
<joint
name="base_link2base_footprint"
type="fixed">
<parent
link="base_footprint" />
<child
link="base_link" />
<origin
xyz="0 0 0.035" />
</joint>
<link
name="right_wheel_link">
<inertial>
<origin
xyz="-4.81191200834309E-07 0.000476524651415774 1.07685290749495E-07"
rpy="0 0 0" />
<mass
value="0.0474080147774195" />
<inertia
ixx="1.81764508915246E-05"
ixy="1.12230898220564E-10"
ixz="9.35470362535892E-11"
iyy="3.36082622230467E-05"
iyz="-1.04867422246077E-10"
izz="1.81763222441443E-05" />
</inertial>
<visual>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://robot/meshes/right_wheel_link.STL" />
</geometry>
<material
name="">
<color
rgba="0.412 0.412 0.412 1" />
</material>
</visual>
<collision>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://robot/meshes/right_wheel_link.STL" />
</geometry>
</collision>
</link>
<joint
name="right_wheel_joint"
type="continuous">
<origin
xyz="0 0.09545 0"
rpy="0 0 0" />
<parent
link="base_link" />
<child
link="right_wheel_link" />
<axis
xyz="0 1 0" />
<limit
lower="-3.14"
upper="3.14"
effort="0"
velocity="0" />
</joint>
<link
name="left_wheel_link">
<inertial>
<origin
xyz="4.90089018379602E-07 -0.000476524651415788 5.43493115676996E-08"
rpy="0 0 0" />
<mass
value="0.0474080147774195" />
<inertia
ixx="1.81764289862563E-05"
ixy="1.23038640102816E-10"
ixz="-1.05305567709027E-10"
iyy="3.36082622230468E-05"
iyz="9.19480494971147E-11"
izz="1.81763441494127E-05" />
</inertial>
<visual>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://robot/meshes/left_wheel_link.STL" />
</geometry>
<material
name="">
<color
rgba="0.412 0.412 0.412 1" />
</material>
</visual>
<collision>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://robot/meshes/left_wheel_link.STL" />
</geometry>
</collision>
</link>
<joint
name="left_wheel_joint"
type="continuous">
<origin
xyz="0 -0.09545 0"
rpy="0 0 0" />
<parent
link="base_link" />
<child
link="left_wheel_link" />
<axis
xyz="0 1 0" />
<limit
lower="-3.14"
upper="3.14"
effort="0"
velocity="0" />
</joint>
</robot>
其中与之前的URDF文件相比,增加了部件base_footprint,将其与base_link连接,读者可以发现,增加base_footprint后机器人正好基于地面了,相比与之前更加的合理,同时也为后续的里程计提供了便利,对比结果如下:


在此建议读者以后每次建立URDF文件都添加部件base_footprint。
将robot功能包下launch文件夹中的display.launch修改为以下:
<launch>
<arg
name="model" />
<param
name="robot_description"
textfile="$(find robot)/urdf/robot.urdf" />
<node
name="joint_state_publisher_gui"
pkg="joint_state_publisher_gui"
type="joint_state_publisher_gui" />
<node
name="robot_state_publisher"
pkg="robot_state_publisher"
type="robot_state_publisher" />
<node
name="rviz"
pkg="rviz"
type="rviz"
args="-d $(find robot)/config/robot.rviz" />
<node name="arbotix" pkg="arbotix_python" type="arbotix_driver" output="screen">
<rosparam file="$(find robot)/config/robot.yaml" command="load" />
<param name="sim" value="true" />
</node>
</launch>
step4.在RViz中添加odom里程计
在VS Code集成命令行输入:
source ./devel/setup.bash
roslaunch robot display.launch
修改大地坐标为odom并添加odom里程计至RViz中:


step6.发布消息
按Ctrl+Alt+T打开终端输入:
rostopic pub -r 10 /cmd_vel geometry_msgs/Twist "linear:
x: 1.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 1.0"
该代码段的旨在10HZ 的频率循环发送运动信息至订阅者,成功结果如下:

到这里我们就完成了通过Arbotix功能包实现了机器人模型的运动。
文章预告:ROS入门教程(六)—— Gazebo仿真
资料来源:奥特学院(Autolabor)
商业转载请联系官方授权,非商业转载请注明出处。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)