Python
Java
PHP
IOS
Android
Nodejs
JavaScript
Html5
Windows
Ubuntu
Linux
二、传感器 Modbus-RTU 通信协议
2023-05-16
水文传感器通信协议
传感器宜采用 RS-485/422、 RS-232C、 SDI-12 等通用接口标准; 通信协议宜采用 Modbus-RTU协议和 SDI-12 通信协议。
通信速率和字节帧结构
通信波特率宜采用1200bps,2400bps ,4800 bps ,9600bps ,19200bps;字节帧结构为1
个起始位“0”,8个数据位,1位停止位“1”,无奇偶校验位;低位在前,高位在后。
数据帧基本格式
传输顺序为低位字节在前,高位字节在后。
地址:地址域在帧的开始部分,由一个字节组成,范围为0~255。
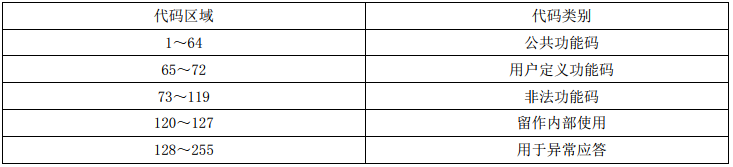
功能代码:Modbus-RTU 通信协议功能代码分为三类:公共功能码,用户定义功能码和保留功能码。
常用公共功能代码:
数据:包含了智能传感器执行特定功能所需要的数据或者智能传感器响应查询时采集到的数据。 数据类型可以是整型数、定点数、十进制浮点数
校验:校验使用16位循环冗余码(CRC16) , 校验码前所有字节参与校验计算, 生成多项式为: X16+X15+X2+1。
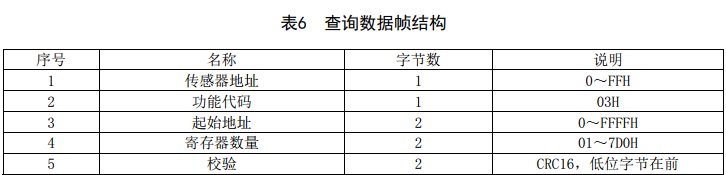
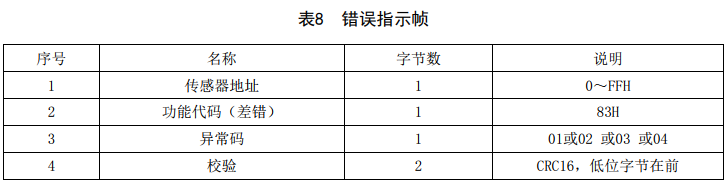
查询数据:标准通信方式采用遥测终端设备(主机)发出查询数据帧,传感器返回响应数据帧或错误指示帧。通常采用公共功能代码03H读寄存器数据
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)
Modbus
RTU
通信协议
二、传感器 Modbus-RTU 通信协议 的相关文章
CRC-16 / MODBUS 校验计算方法
CRC 16 MODBUS xff1a 1 xff09 CRC寄存器初始值为 FFFF xff1b 即16个字节全为1 xff1b 2 xff09 CRC 16 MODBUS的多项式A001H 1010 0000 0000 0001B H
DSP28335 高速modbus代码实现
程序特点 不使用while循环速度尽可能快速除去程序运行时间 xff0c 没有多余等待时间优化CRC校验方式 头文件modbus h span class token macro property span class token dire
I2C总结(单主机和多主机)
I2C在使用过程中单个主机是不论是硬件I2C还是硬件I2C都不太难 理解好时序很容易实现 还有就是很多人认为硬件I2C有很多缺点 其实这是谬论吧 硬件I2C在稳定性上胜过软件I2C 而且不占用MCU时间 可以实现I2C中断 如果系统有硬件I
MODBUS协议中的CRC校验
一 RTU 檢查碼 CRC 計算器 第一种 RTU 檢查碼 CRC 計算器 大小端转换后 CRC检查码为 AB 89 说明 这个计算器还是可以用的 第二种 On line CRC calculation and free library 二
BLE低功耗蓝牙协议栈
目录 一 BLE低功耗蓝牙协议栈 1 蓝牙核心协议 Bluetooth Core 2 蓝牙应用层协议 Bluetooth Application 3 BLE低功耗蓝牙核心协议层详解 Bluetooth Core 物理层 PHY 链路层 LL
通信 / 网络地址转换(NAT)过程
一 英文全称 Network Address Translation 二 诞生原因 解决因为可用 IP 过少导致有些设备无法连入网络的问题 该技术的核心思想是多个私有网络 ip 通过一个公共 ip 连入网络 三 过程说明 为了实现上述思想
Modbus CRC16算法
Modbus CRC16算法 直接运算 unsigned short modbus crc16 unsigned char pdata unsigned short len unsigned short i j crc crc 0xFFFF
ModbusSlave安装及使用指南正式版带序列码
ModbusSlave是一个从站设备仿真软件 它用于接收主设备的命令包 并回送数据包 可用于测试和调试Modbus主站设备 便于观察Modbus通信过程中的各种报文 ModbusSlave支持ModbusRTU ASCII TCP IP等协
Modbus协议详解2:通信方式、地址规则、主从机通信状态
首先我们要清楚 Modbus是一种串行链路上的主从协议 在通信线路上只能有一个主机存在 不会有多主机存在的情况 虽然主机只有一个 但是从机是可以有多个的 Modbus的通信过程都是由主机发起的 从机在接收到主机的请求后再进行响应 从机不会主
西门子S7通信协议以及JAVA版的实现
西门子S7协议实现 采用java的方式实现西门子S7协议 链接地址 iot communication github https github com xingshuangs iot communication gitee https gi
HTTPS 原理详解
转自 https baijiahao baidu com s id 1570143475599137 wfr spider for pc 前言 HTTPS 全称 HyperText Transfer Protocol over Secure
通信协议——MII/GMII
MAC层接口协议 概述 MII GMII 概述 随着宽带数据业务的飞速普及 数据产品的端口速率及端口密度也大大提升 于是以太网的MAC与PHY层之间的媒介无关接口 MII 也在不断简化 推陈出新 多种多样 基于此 本文简要介绍了以太网的PH
【Modbus】 RTU CRC校验码计算方法
Modbus是美国Modicon公司 即现在的Schneider Electric公司 于1979年开发的一种通信协议 其目的是采用一根双绞线实现多个设备之间的通信 Modbus 协议采用问答式的通信方式 具有简单 硬件便宜 通用性强 使用
usart和uart的主要区别
USART 通用同步和异步收发器UART 通用异步收发器 当进行异步通信时 这两者是没有区别的 区别在于USART比UART多了同步通信功能 这个同步通信功能可以把USART当做SPI来用 比如用USART来驱动SPI设备 同步是指 发送方
MAC 认证和 MAC 旁路认证
一 MAC 认证原理 1 MAC认证是什么 MAC 认证 是指终端网络接入控制设备自动获取终端的 MAC 地址 作为接入网络的凭证发到RADIUS 服务器进行校验 MAC 认证是一种基于接口和 MAC 地址对用户的网络访问权限进行控制的认证
开放型 MODBUS-TCP规范(中文版)2
导读 5 3 等级2指令详述 5 3 1 强制多点线圈 FC 15 请求 Byte 0 FC 0F 16进制 Byte 1 2 参考数值 Byte 3 4 比特数 1 800 Byte 5 字节数 B 比特数 7 8 Byte 6 B 5
Tcp建立连接为什么需要三次握手
前言 众所周知tcp传输层协议在建立连接的时候需要三次才能建立起一个真正的可靠连接 可是为什么是三次呢 不可以是两次 四次等等呢 可以自己思考一番 带着疑问可以看下文 三次握手 在 计算机网络 一书中其中有提到 三次握手的目的是 为了防止已
SPI总线协议概述
一 概述 SPI serial peripheral interface 是一种同步串行通信协议 由一个主设备和一个或多个从设备组成 主设备启动与从设备的同步通信 从而完成数据的交换 SPI是一种高速全双工同步通信总线 标准的SPI仅仅使用
CRC-CCITT 到 CRC16 Modbus 实施
我在使用 PHP 生成 modbus CRC16 代码时遇到很多麻烦 我在互联网上找到了很多不同的代码 但我尝试过它们 但由于某种原因我没有得到正确的结果 我找到了用于生成 CRC16 CCITT 的 PHP 代码 我已经将查找表更改为mo
Modbus TCP Android 应用程序
我正在开发 Android 应用程序来在 tcp ip modbus 的帮助下控制 PLC 有人对此有很好的教程吗 Modbus协议转义线程 Android Jamod https stackoverflow com questions 1
随机推荐
ubuntu查看运行的服务_Linux 上查看系统/服务器运行时间的 11 种方法
译自 xff1a https www 2daygeek com 11 methods to find check system server uptime in linux 作者 xff1a Magesh Maruthamuthu 译者 x
网御星云防火墙配置手册_Docker安全配置分析
1 概述 最近有很多关于容器安全性的讨论 xff0c 尤其是当在生产环境中部署使用容器的时候 容器环境所面临的大多数安全威胁 xff0c 和非容器环境存在的威胁在本质上基本是一致的 只不过基于容器的某些特性 xff0c 出现了一些新的场景和
linux解压tar包时并重命名,Linux命令 -- tar解压缩命令
1 tar gz tar bz2 tar xf 2 gzip 3 zip 4 zcat data 43 F 打包名称包含当前时间 常用命令 xff1a 1 tar打包压缩 打包 xff1a tar czf dir1 tar gz dir1
桌面计算机打开无响应,电脑桌面假死(点击无反应)怎么解决?
不少朋友提到遇到过电脑桌面假死 xff0c 桌面图标怎么点击都没反应 xff0c 最后无奈只能强制关机才能解决问题 有什么方法可以不用强制关机就能解决电脑假死问题吗 xff1f 当然有 xff01 还不至一种呢 下面就一起来看看三种处理电脑
服务器程序单线程性能,1.3.5 通过多线程按比例提升服务器程序的性能
1 3 5 通过多线程按比例提升服务器程序的性能 背景 HTTP运行于TCP之上 xff0c 由TCP使用流控 xff0c 确保发送者产生数据的速度不快于慢的接收者 xff0c 或者确保拥塞的网络能够缓存和处理数据 Ste93 对于处理重的
无线路由器 tftp服务器怎么开启,水星路由器tftp服务器怎么开启
原标题 xff1a 34 水星路由器tftp怎么开启 34 的相关路由器设置教程资料分享 来源 xff1a 191路由网 这两天有网友问小编 水星路由器tftp怎么开启 xff0c 191路由器网小编在网上搜索了一些资料 xff0c 供大家
php服务器内容修改时间,php设置服务器时间
php设置服务器时间 内容精选 换一换 已获取服务器管理员帐号与密码 打开CMD运行窗口 xff0c 输入gpedit msc xff0c 打开本地组策略编辑器 打开组策略在指定RD会话主机服务器的授权模式下拉列表中选择按用户 设置允许RD
python词频统计完整步骤_Python使用Hadoop进行词频统计
今天 xff0c 我们利用python编写一个MapReduce程序 xff0c 程序的目的还是百年不变的计算单词个数 xff0c 也就是WordCunt 所谓mapreduce其实就是先分散计算后综合处理计算结果 首先我们来看一下map部
readhat 远程可视化桌面_vnc远程桌面 win10,4款vnc远程桌面 win10
VNC server与VNC viewer支持多种操作系统 xff0c 如Unix系列 xff08 Unix xff0c Linux xff0c Solaris等 xff09 xff0c windows及MacOS xff0c 因此可将VN
Linux基础:xargs命令
简介 xargs可以将输入内容 xff08 通常通过命令行管道传递 xff09 xff0c 转成后续命令的参数 xff0c 通常用途有 xff1a 命令组合 xff1a 尤其是一些命令不支持管道输入 xff0c 比如ls 避免参数过长 xf
jsp是在html里面嵌入哪种代码?_嵌入式工程师的真实现状,月薪8千or年薪40万?...
一名一线企业嵌入式软件工程师的笔者 xff0c 想通过自己的实际经历理性地评论当今嵌入式行业的真实状况 创客学院帮你把 嵌入式行业发展跟现状分析 嵌入式的定义和举例分析 目前国内一个普遍被认同的定义是 xff1a 以应用为中心 以计算机技术
.cxx文件_CMakeList.txt在大型文件应用(SLAM常用库添加依赖项)
基本的CMakeLists txt并不难 xff0c 主要有生成库 生成执行文件 链接二者以及找库find package 找头文件include directories 生成执行文件add executable 链接库和执行文件targe
linux系统编程练手项目,精选 22 个 C++ 项目,编程小白练手首选!
C C 43 43 做为元老级的编程语言 xff0c 任时光更迭依旧屹立不倒 xff0c 哪怕现在煊赫一时的AI xff0c 其底层也是用其编写 linux 那么做为新手该如何快速上手 C 43 43 呢 xff1f 固然是敲代码啊 xff
cipher解密失败_Flask框架实现的前端RSA加密与后端Python解密功能详解!
本文实例讲述了Flask框架实现的前端RSA加密与后端Python解密功能 分享给大家供大家参考 xff0c 具体如下 xff1a 前言 在使用 Flask 开发用户登录API的时候 xff0c 我之前都是明文传输 username 和 p
关于树莓派使用Github涉及ssh的问题
关于树莓派使用Github涉及ssh的问题 之前用树莓派装了一个Python控制的小车 xff0c 打算把代码发到GitHub上 xff0c 之前都是用笔记本编写代码scp到树莓派上跑程序的 xff0c 没试过树莓派git命令 xff0c
linux创建pc目录,linux中mkdir创建目录命令使用说明
1 xff0e 命令格式 xff1a mkdir 选项 目录 2 xff0e 命令功能 xff1a 通过 mkdir 命令可以实现在指定位置创建以 DirName 指定的文件名 命名的文件夹或目录 要创建文件夹或目录的用户必须对所创建的文件
普中51控制火焰传感器_基于普中实验板 51单片机 led点阵贪吃蛇
主程序 xff1a include include include 34 ds1302 h 34 define uchar unsigned char define uint unsigned int define max length 6
arm 大端还是小端_C|大端、小端字节序各自优势及判断
我们知道 xff1a 数据 xff1a 高位 低位 xff0c 如0x04030201 xff0c 04是高位 xff0c 01是低 内存 xff1a 低地址 高地址 xff0c 如0x00000000 0xFFFFFFFF 另外 xff0
相机径向畸变和切向畸变_畸变模型
径向畸变切向畸变 理想的针孔成像模型 xff0c 物和像满足相似三角形的关系 实际上由于相机光学系统制造工艺的误差 xff0c 实际成像与理想成像存在几何失真 xff0c 称为畸变 根据Brown畸变模型 xff0c 畸变主要分为径向畸变和
二、传感器 Modbus-RTU 通信协议
水文传感器通信协议 传感器宜采用 RS 485 422 RS 232C SDI 12 等通用接口标准 xff1b 通信协议宜采用 Modbus RTU协议和 SDI 12 通信协议 通信速率和字节帧结构 通信波特率宜采用1200bps xf
热门标签
contenttag
ancestry
sqliteodbc
octokitnet
qwt
toolsjar
jcmd
antijoin
asyncore
canonsdk
tabulapy
minicart
ggrough
backstage
akkaio
emacspeak