从上一节,我们知道主函数rosNodeTest.cpp从IMU和相机结点获取了IMU和相机的信息,并传入到位姿估计器 estimator中,使用的函数分别是
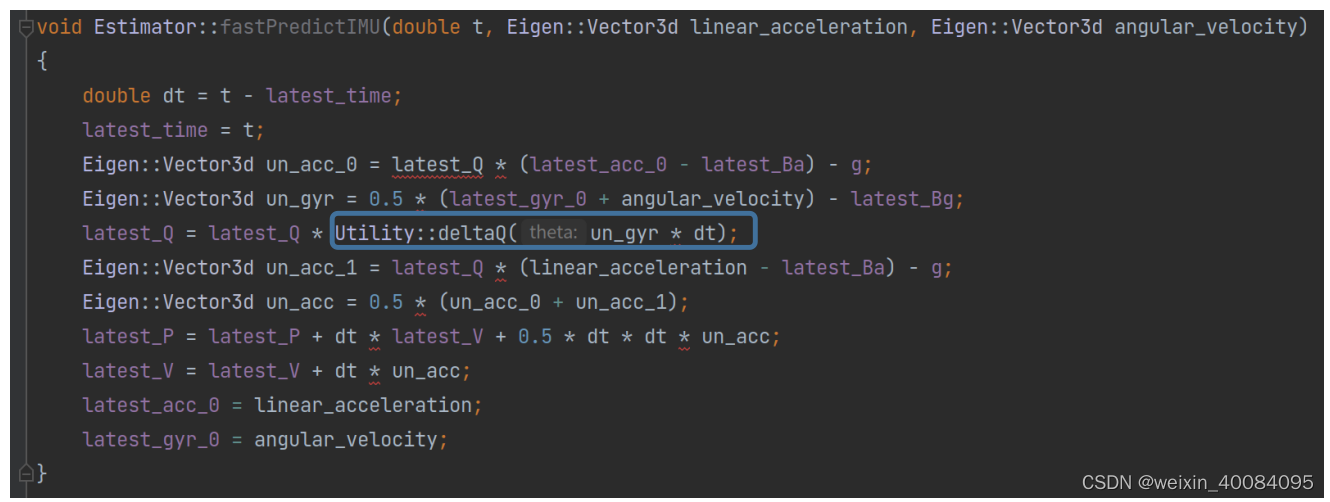
在更新旋转Q时,使用了函数Utility::deltaQ
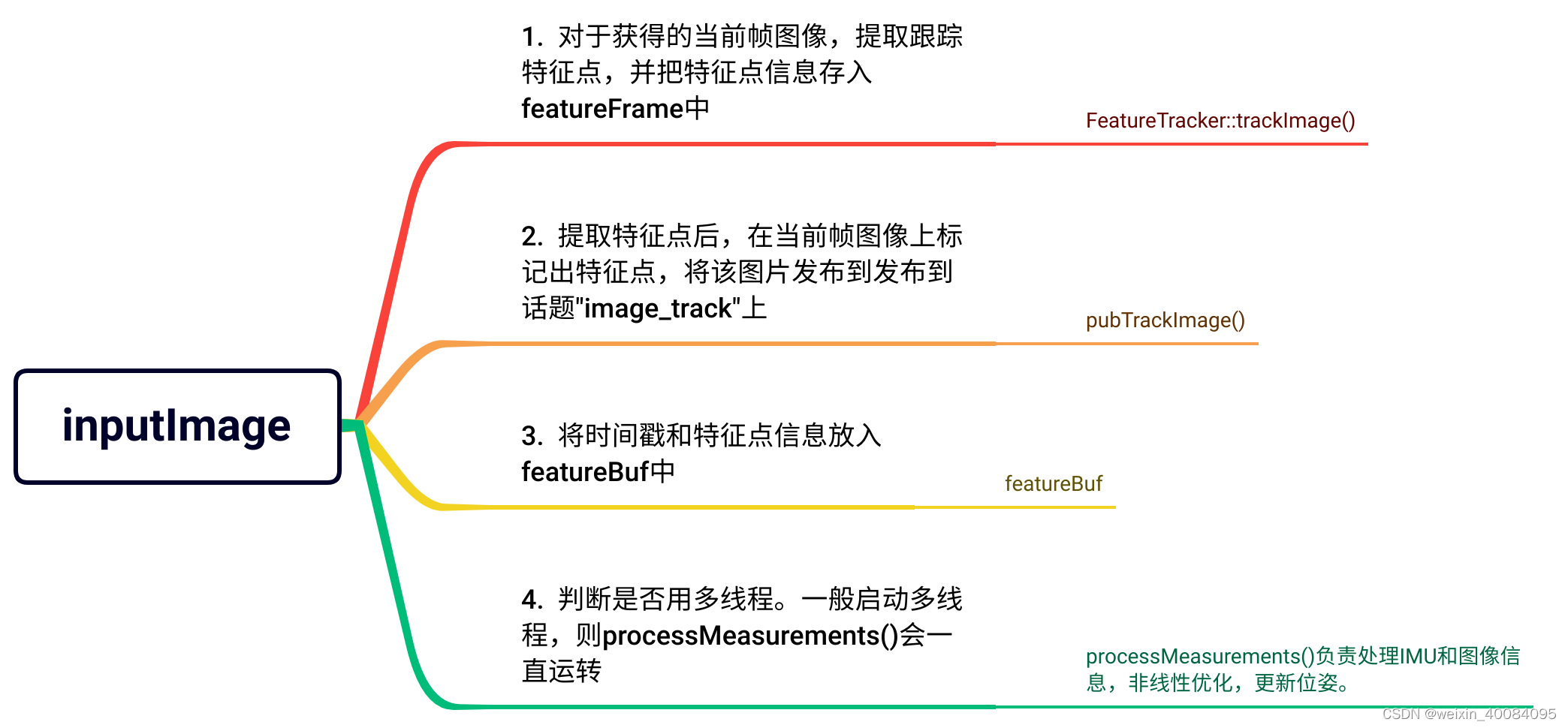
对以vins代码的解读,我现在的体会是:要从物理层面出发,从物理背景出发,这样才能更好地理解代码的整体架构。以trackImage()的代码为例子,如果从代码的第一行一步步解析到最后一行,这样很难体他的逻辑,只有站在较高的角度才能更好地解读他,把他先分成几个子功能模块,再分析这几个子功能模块的作用。只有这样的分析,才能更好地理解代码。