slam中经常会需要表示一个刚体的位姿。例如imu的位姿,相机的位姿。首先我们需要在一个刚体上架上一个坐标系。这个坐标系为本体坐标系。

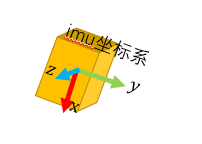
怎么架一个坐标系?imu本身就有规定其本身的x,y,z轴的方向。相机一般认为,z轴平行于镜头朝外,x轴与像平面的水平方向一致,从左到右,y轴与像平面垂直方向一致,从上到下。
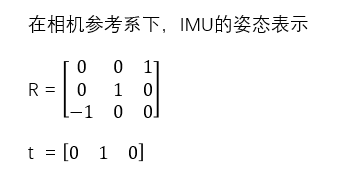
现在我们以这个cam坐标系作为参考,解算出了imu坐标系在cam坐标系下的位姿,为 R ,t
t 代表了平移向量,为imu坐标系原点在cam坐标系的位置
R代表的含义可以有三种解释:
- 字面含义:R的三个列向量为imu系 x,y,z轴在原坐标系的表示
- 表示Cam坐标系如何旋转才能转到IMU坐标系 --------- 坐标系的变换
- 表示imu坐标系中的点通过这个旋转矩阵变换到w坐标系中去 --------- 点的变换
关于第一种解释比较容易理解。
第二种解释的一个例子为已知此时Cam系在世界坐标系中,此时的姿态为R_cam,则imu在世界坐标系中,姿态为 R_cam * 𝑅
第三种解释的一个例子为已知此时Imu测得的角速度为w=[𝑤1,𝑤2,𝑤3],则在cam系中,角速度为𝑅 𝑤
网上很多可能告诉的是点的变换是左乘,坐标系的变换是右乘。其实也不是固定的。坐标系的变换也可以使左乘。绕着旋转轴的是右乘,绕着固定轴的左乘。

在vins 的配置文件中,需要填写相机和imu之间的外参。注解中特别说明,这个外参是相机帧变换到imu帧,注意,这个变换是点的变换。也就是这个旋转外参是以imu为参考帧,相机的姿态r。平移外参是以imu为参考帧,cam的光心在imu坐标系中的位置。vins程序中是以ric,tic来表示这组外参。
vins坐标系变换中,困扰比较久的是一个g2r(const Eigen::Vector &g)函数。这个函数主要是为了做一个重力对齐。
在初始化进行到把重力估计出来后,我们假设,现在已知解算出了在第一帧Imu帧下,重力向量为 g =[-9.4 −2.3 0.4],这时候第一帧imu大概是这个样子:
我们假设解算都是以第一帧imu帧为参考系(实际上初始化是以第一帧图像帧为参考系,不过不影响)。
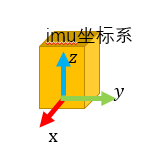
为了使得参考坐标系和重力对齐。我们期望的参考坐标系应该是:
因此vins中有两步操作:


这里可能有两个问题:
1.为什么是[0 0 9.8]而不是[0 0 -9.8] ?因为vins的公式推算中,g都是用-号,因此这个相当于是一个朝上的重力.
2.为啥是R1R0 而不是R0R1?因为这个旋转是绕着固定轴旋转的,所以使用左乘。

注意,vins中使用了g2r后又使用了一次yaw的调整,主要是因为他是以C0为参考系。又进行一次调整保证最初是的imu帧变换后,yaw角为0.
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)