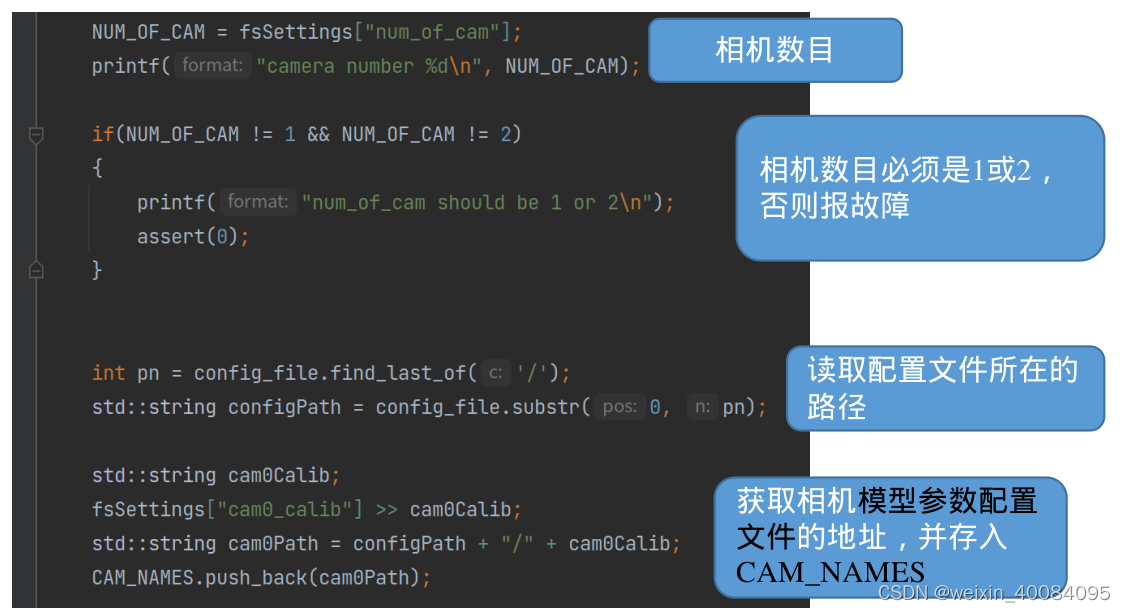
VINS是利用参数文件yaml统一管理重要的参数,主要分为两个参数配置文件,如下图:
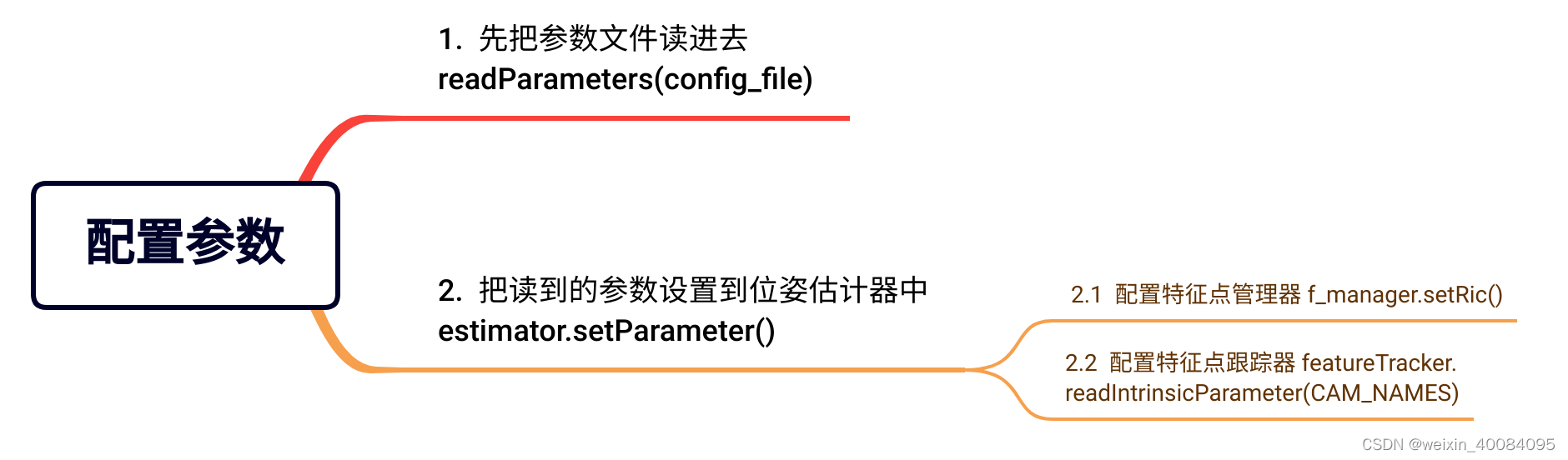
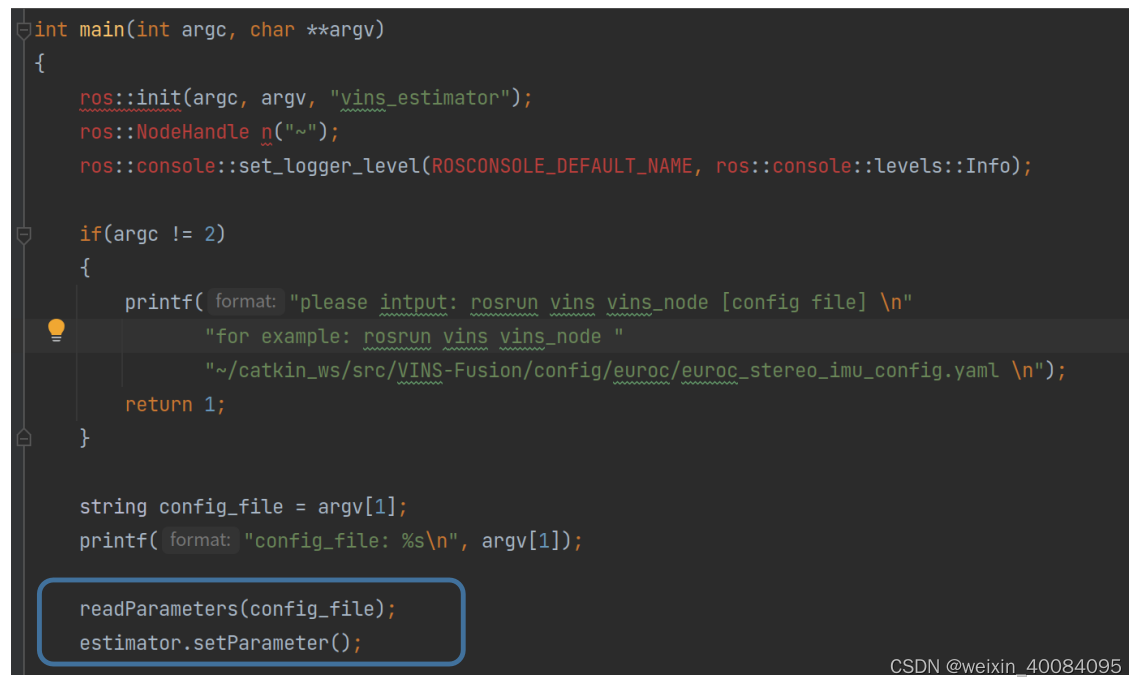
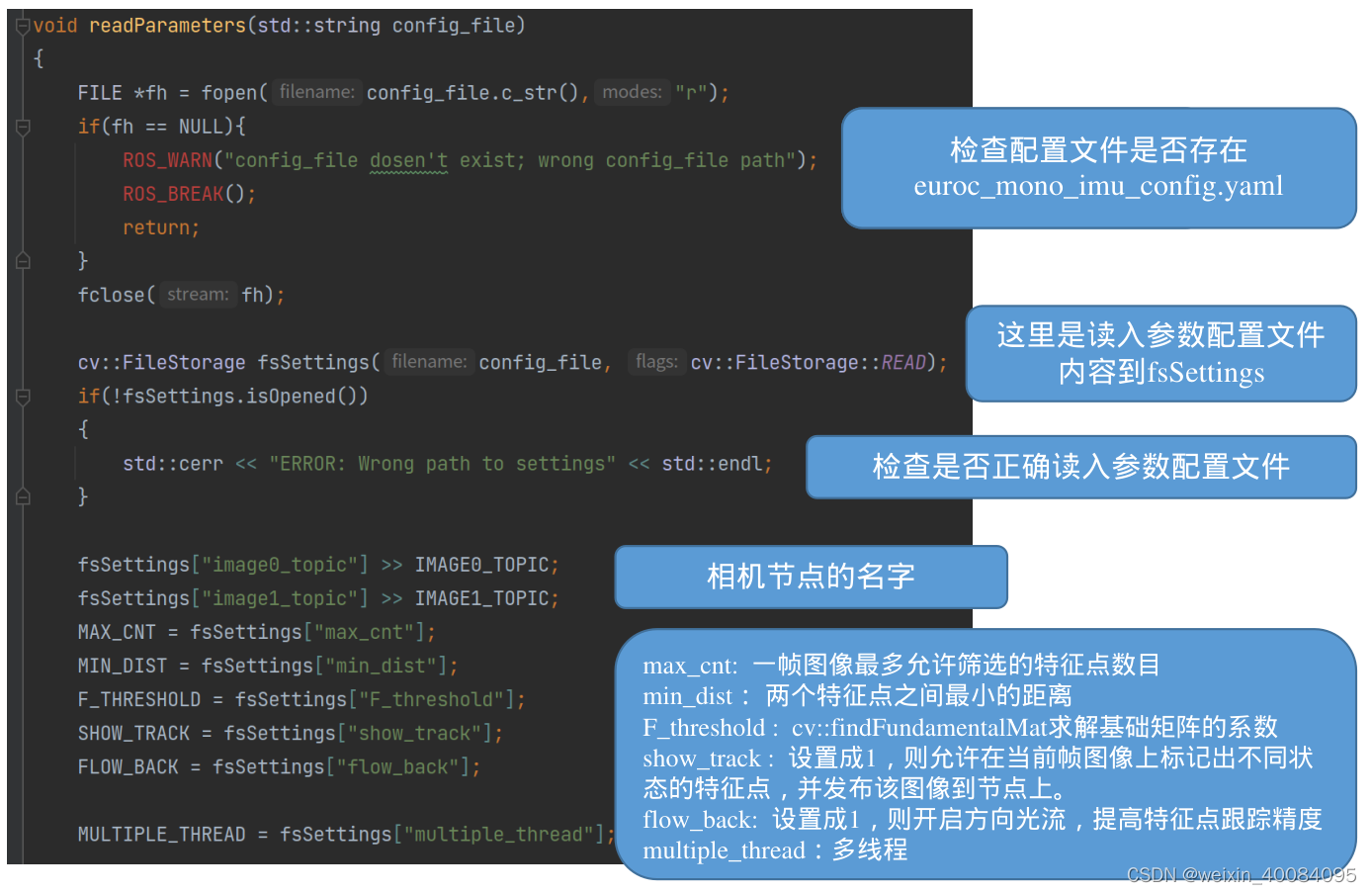
在main函数中,读取参数分两步: 第一步, 利用readParameters(config_file)先把参数文件读进去 第二步,利用estimator.setParameter()把读到的参数设置到位姿估计器中。
在生成位姿估计器中,也会生成来和特征点相关性很强的两个对象:
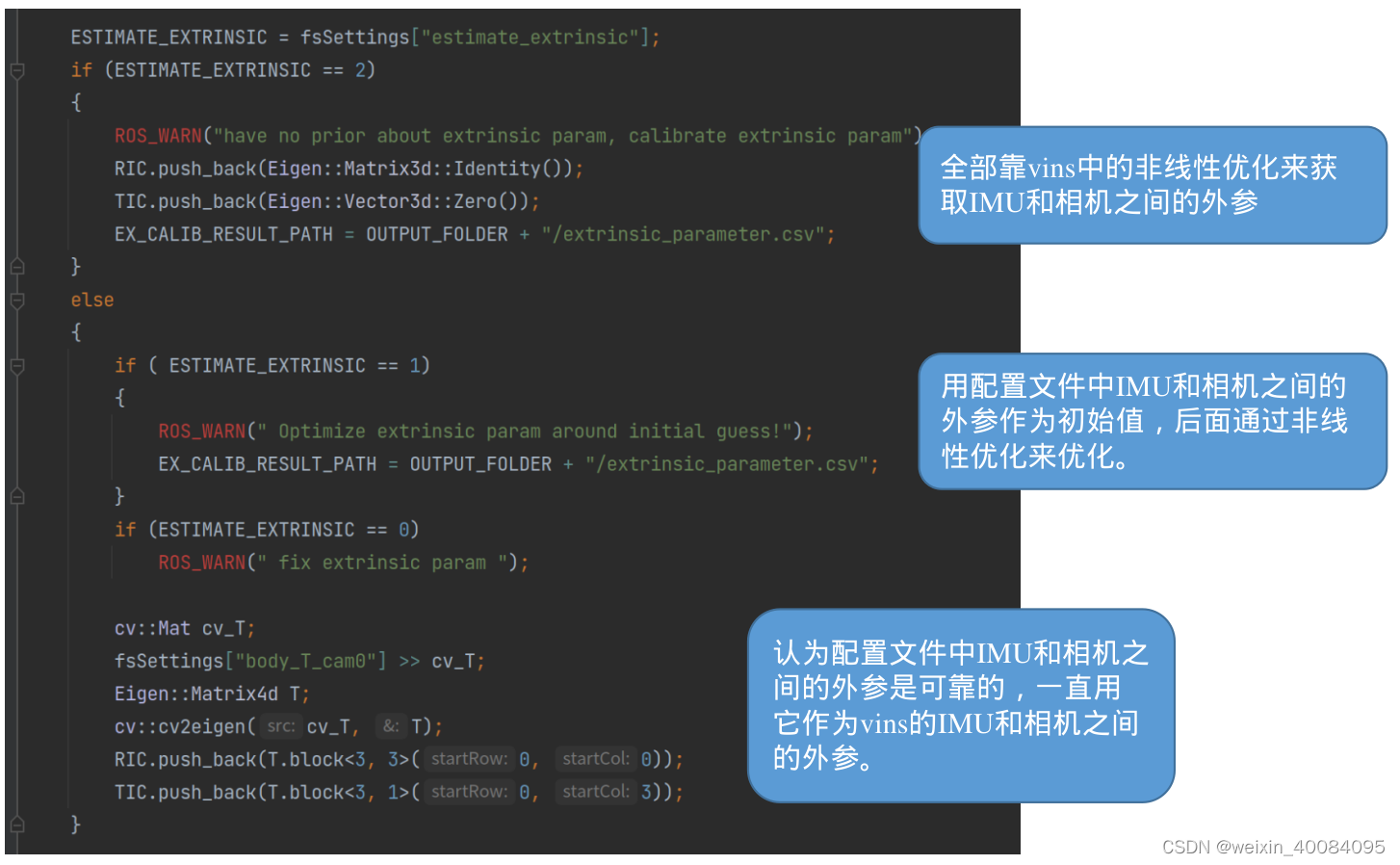
为什么只传递了旋转外参ric??
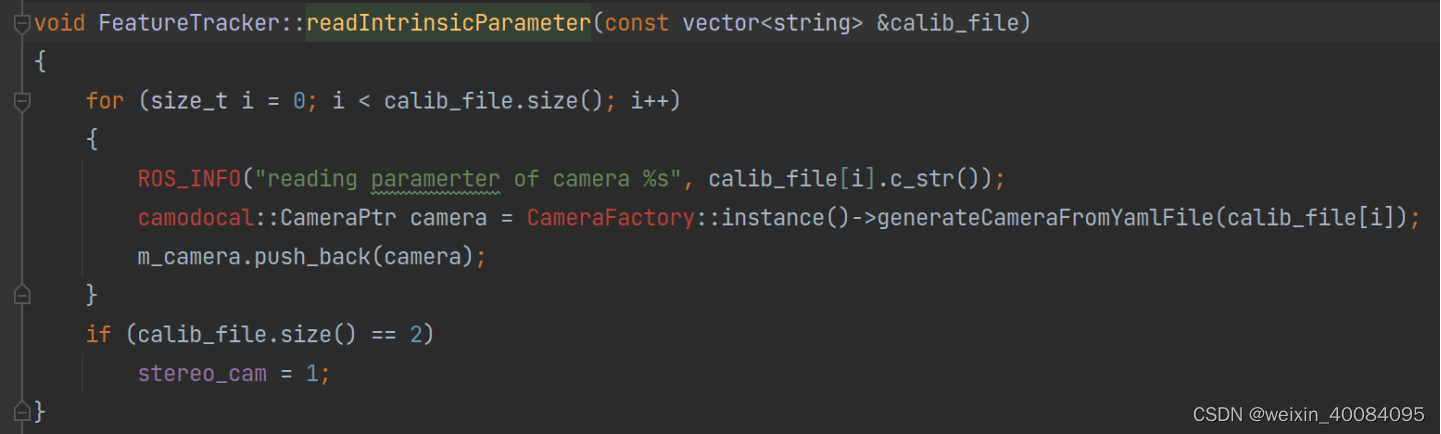
功能:readIntrinsicParameter()调用相机工厂CameraFactory中的generateCameraFromYamlFile()来生成相机模型,生成的相机模型是用共享指针的方式读取的。
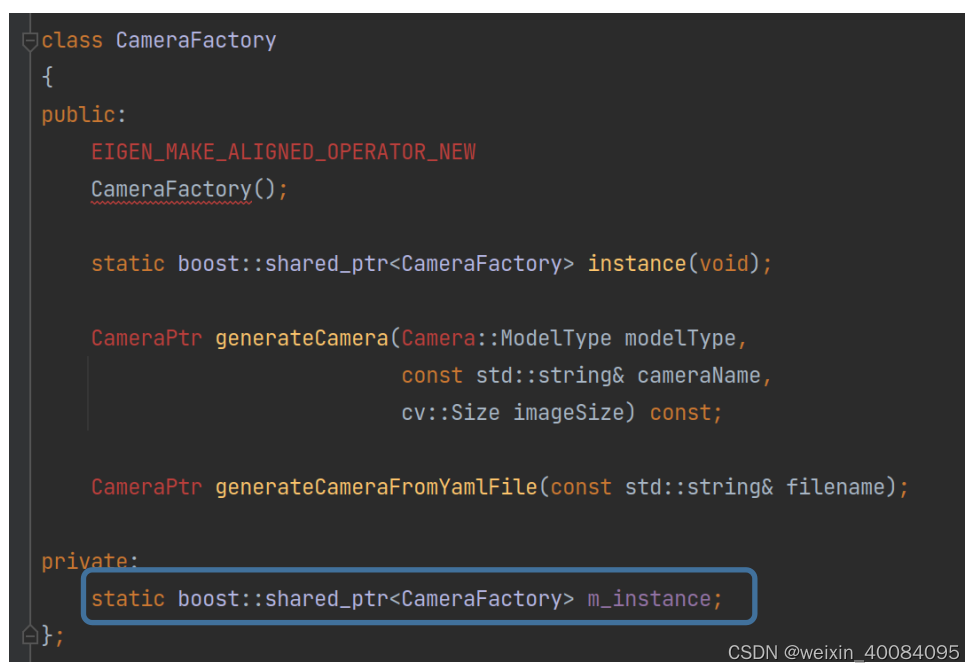
功能:CameraFactory::instance()返回一个相机工厂类的共享指针m_instance
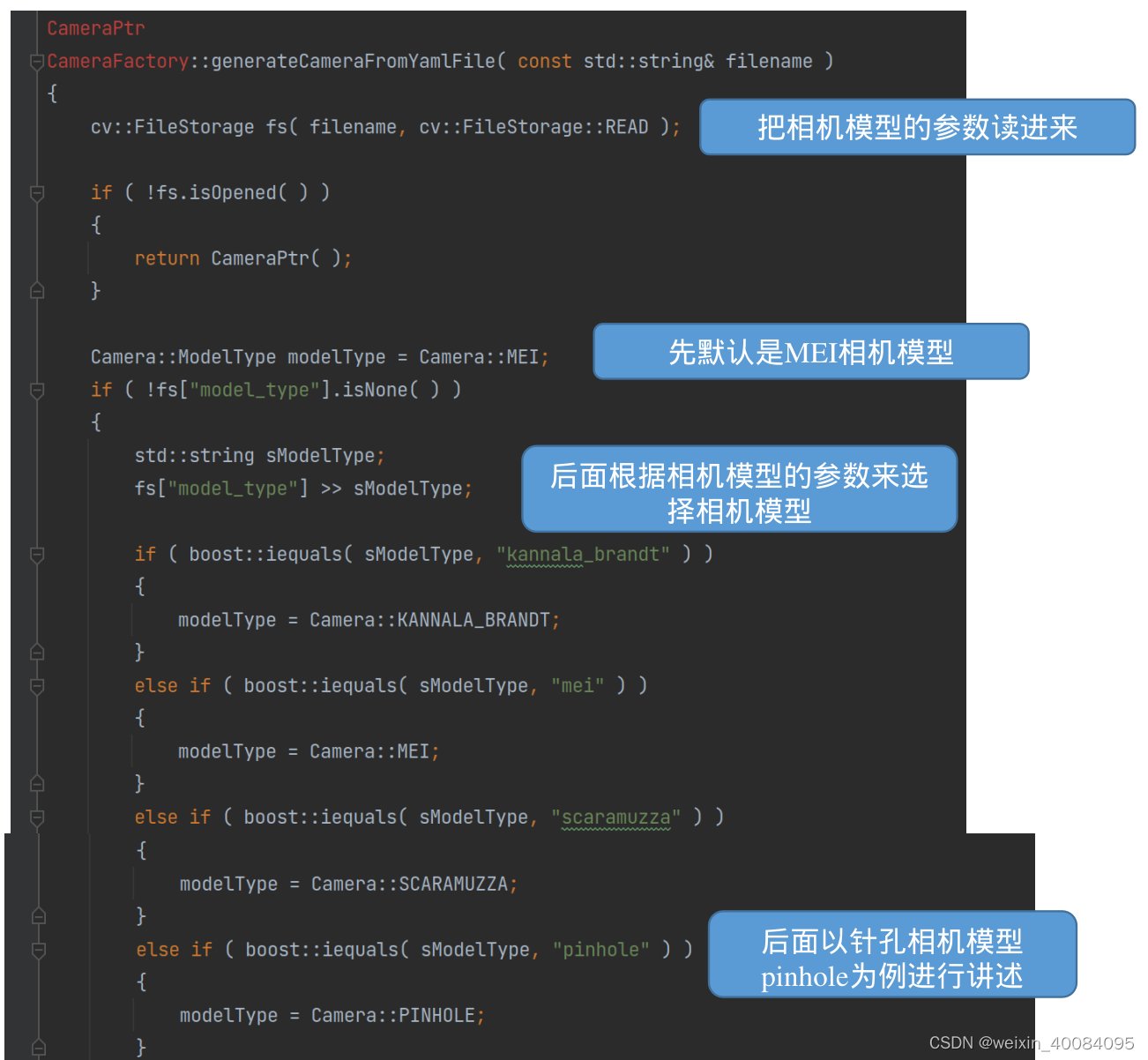
功能:调用相机工厂类的共享指针m_instance,用他的成员函数generateCameraFromYamlFile()读取相机模型参数配置文件中的参数,最终生成对应的相机模型。
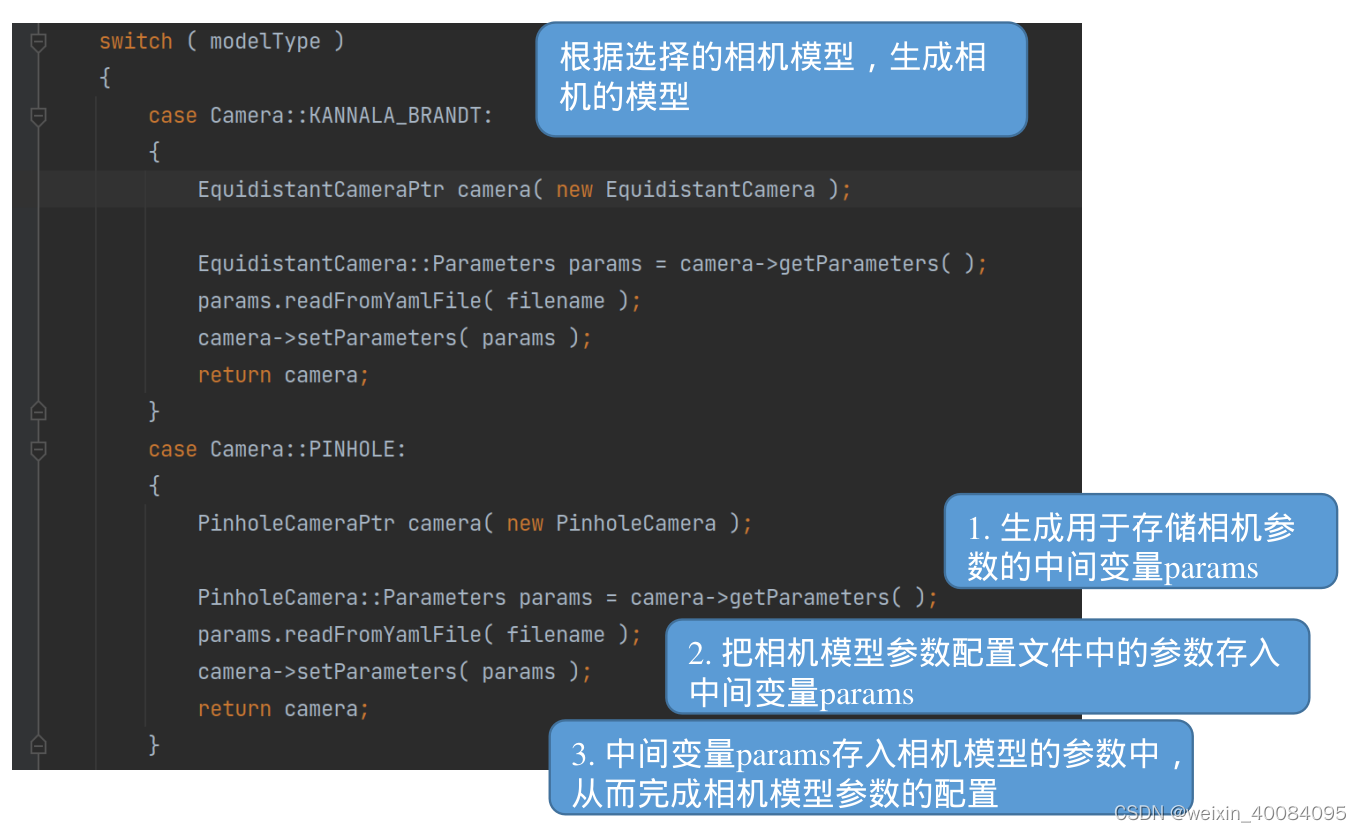
在generateCameraFromYamlFile(),当选择好需要生成的相机模型的名字后,会通过三步完成相机模型的参数配置:
功能:生成用于存储相机参数的相机参数对象(中间变量params)
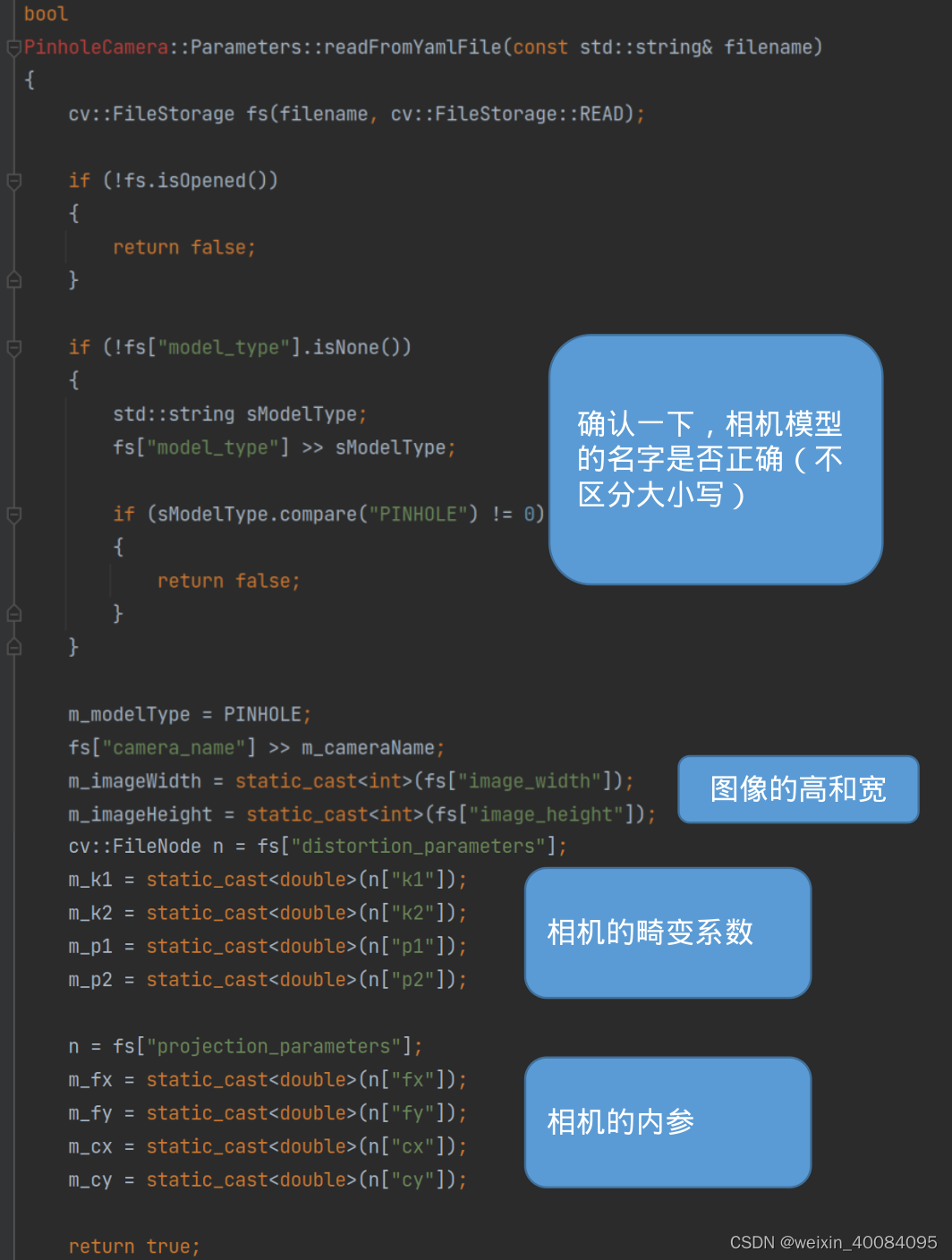
功能:把相机模型参数配置文件中的参数存入中间变量params
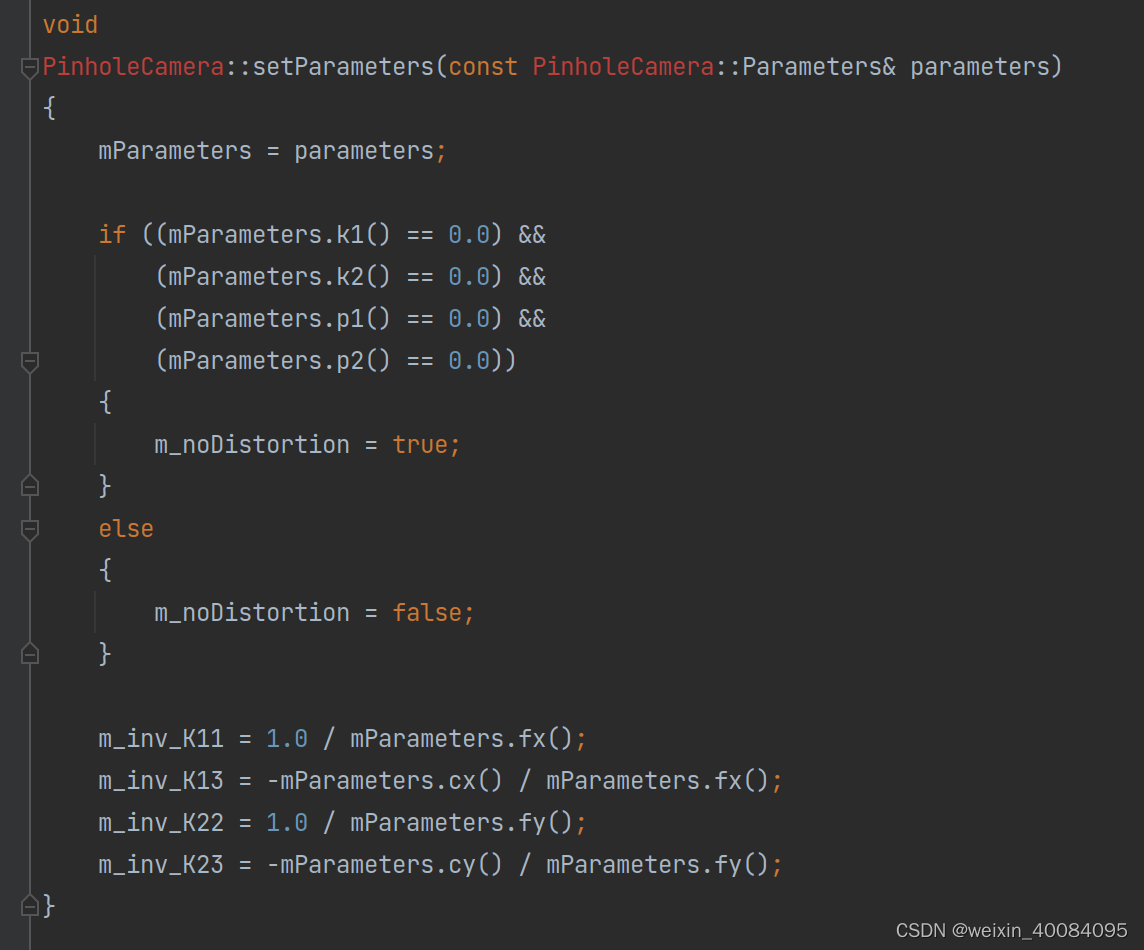
功能:中间变量params存入相机模型的参数中,从而完成相机模型参数的配置