目录
LADRC算法
LADRC算法推导二阶线性系统为例
LADRC算法n阶
LADRC离散化—零阶保持法
一阶系统
二阶系统
LADRC参数整定方法
参考文献
LADRC算法
自抗扰控制(ADRC,Active Disturbance Rejection Control)是由韩京清先生提出的一种不依赖对象模型的控制算法,针对ADRC参数整定困难问题,高志强教授提出线性自抗扰控制(LADRC),将ADRC参数与控制器和观测器的频率联系起来,把参数整定问题转化为带宽调节问题。

LADRC基本结构图
自抗扰控制的精髓:扰动估计和补偿。
总扰动 =内部扰动 (系统模型的不确定性)+ 外部扰动
线性扩张状态观测器LESO可分为无对象模型线性扩张状态观测器、模型辅助线性扩张状态观测器和降阶线性扩张状态观测器。
线性误差反馈控制律LSEF中存在补偿分量对总扰动进行实时估计和补偿。
使用LESO对总扰动进行估计,使用LSEF消除总扰动
LADRC算法推导二阶线性系统为例


y为输出,u为输入,x1、x2和x3为状态变量,x3为扩张状态(状态变量数=系统阶数,二阶系统所以x3成为扩张状态),w为扰动,f为总扰动,扩张状态空间方程:


无对象模型线性扩张状态观测器:



其中,yc为输出,z为观测器的状态向量,L为观测器误差反馈增益矩阵。

由下式

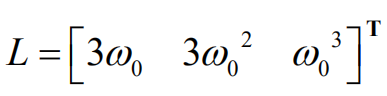
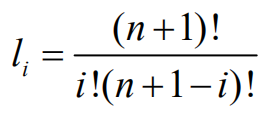
观测器增益矩阵L与观测器带宽w0:
线性误差反馈控制律:
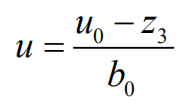
其中,u0:
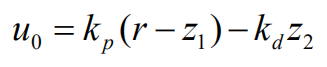
r为给定值,z1、z2和z3为观测器状态, kp和kd是控制器的增益。
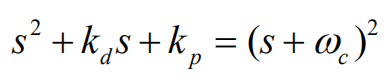
控制器带宽:

综上可得线性自抗扰控制算法公式:

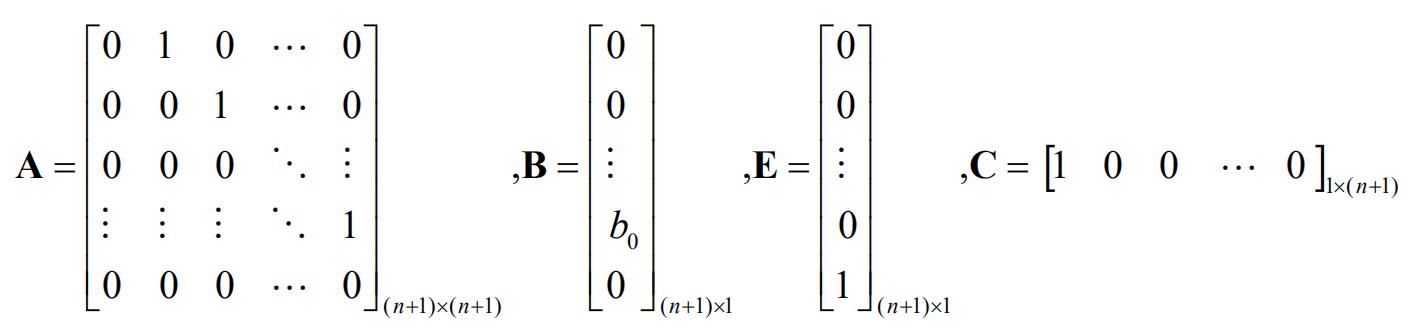
LADRC算法n阶
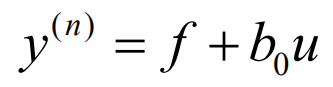
总扰动f扩张成第n+1个状态变量




观测器带宽w0:决定了观测器的跟踪速度,w0越大,观测器估计精度越高,抗干扰能力越强,瞬态响应速度加快,但是w0过大,会引入高频噪声,系统不稳定。w0参数应该考虑估计性能和噪声容许量。
控制器带宽wc:决定了控制器的响应速度,wc越大,系统响应速度越快,但是wc过大会导致系统超调甚至不稳定。过大会引入更多噪声,所以满足控制性能时,应选择较小的wc。
扰动补偿b0:表示控制对象的特性,可以由阶跃对象的初始加速度导出,b0越大,抗干扰能力越弱,为了使系统保持稳定,b0不能过大也不能过小。
w0和wc的关系:近似有w0=(2~10)wc或w0=(3~5)wc一般取w0=4wc。
LADRC离散化—零阶保持法
LADRC算法在计算机上运行需要离散化,在固定采样率下运行。控制器部分值针对观测器输出分别按照kp、kd放大组合,不需要离散,只需要对观测器进行离散化。
当前零阶保持法效果优于当前一阶保持法和当前欧拉法,形式上更简单,相位滞后更小。零阶保持法在被离散对象前加零阶保持器,然后一起z变换离散化。
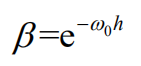
离散估计器极点与连续观测期极点之间的关系如下,其中h为采样周期。
一阶系统
一阶系统连续模型:


省略f, 添加零阶保持器后z变换得:



离散估计器方程如下,其中ud(k)为离散估计器输入组合,yd(k)为离散估计器输出,Lc为离散估计器误差反馈增益矩阵。

使下式成立,

得到离散估计器误差反馈增益矩阵:
最终得到一阶系统离散估计器方程:

二阶系统
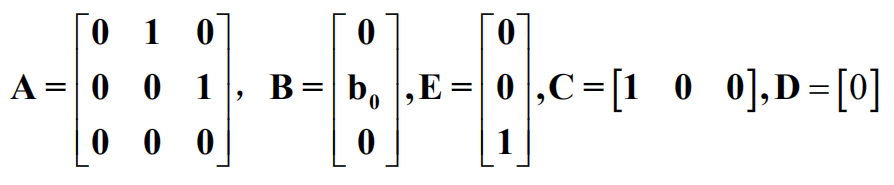
二阶系统连续模型:
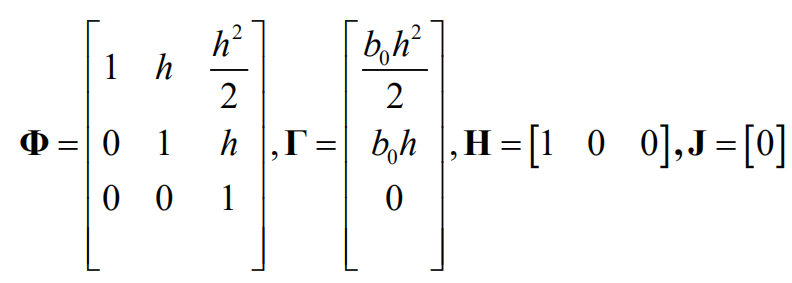
省略f, 添加零阶保持器后z变换得:
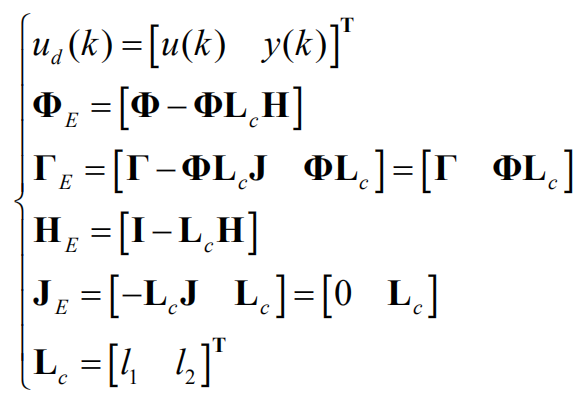
离散估计器方程如下,其中ud(k)为离散估计器输入组合,yd(k)为离散估计器输出,Lc为离散估计器误差反馈增益矩阵。

使下式成立,
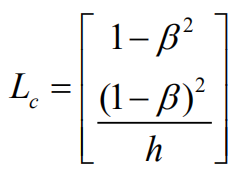
得到离散估计器误差反馈增益矩阵:
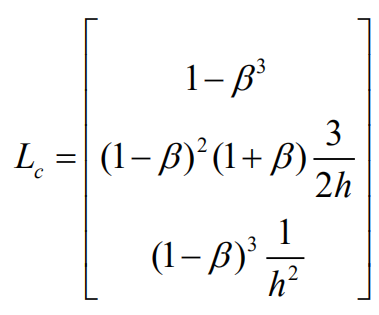
最终得到二阶系统离散估计器方程:

LADRC参数整定方法
1.设置一个较小的b0,使系统运行,逐渐增大b0,直到控制效果相对稳定。
2.设置较小的wc,较大的w0。
2.逐渐增大wc,期间如果系统不稳定,观察系统是否发生抖动,则重新增大b0。
参考文献
[1]韩京清.从PID技术到“自抗扰控制”技术[J].控制工程,2002(03):13-18.
[2]高志强.自抗扰控制思想探究[J].控制理论与应用,2013,30(12):1498-1510.
[3]王传榜,王永,梁青.降阶自抗扰控制器对时滞系统控制研究[J].控制工程,2016,23(10):1602-1606.DOI:10.14107/j.cnki.kzgc.140569.
[4]梁青,王传榜,潘金文,卫一恒,王永.线性自抗扰控制参数b_0辨识及参数整定规律[J].控制与决策,2015,30(09):1691-1695.DOI:10.13195/j.kzyjc.2014.0943.
[5]朱斌.自抗扰控制入门
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)