部分内容来源于网络,外加了自己的实践,记录了一下。
安装过程比较傻瓜,这里不再赘述,网上相关内容也较多,如果怕出错,可以查一下。安装结束后,在菜单栏打开或者鼠标右键选择打开git bash;
输入git --version,得到如下图信息就算是安装成功。 安装完成后打开git bash输入这个设备的用户信息,因为Git是分布式版本控制系统,所以,每个机器都必须自报家门:你的名字和Email地址。用了这个参数,表示你这台机器上所有的Git仓库都会使用这个配置,当然也可以对某个仓库指定不同的用户名和Email地址。
git --version
$ git config --global user.name "Your Name" $ git config --global user.email "email@example.com"
本地仓库有很多操作,这里只介绍简单的东西,当然这些东西在VScode能更加简单的操作,这里只是做简单了解。
(1)随便在电脑上新建一个文件夹作为本地仓库,文件夹中任意新建一个文件用于测试。 (2)右键在文件里打开git bash,输入git init,文件夹中会出现一个.git文件,这样就初始化了一个仓库。 (3)将文件提交到本地仓库,首先用add命令把要提交的内容都加进来,然后用commit执行提交操作!以刚才新建的test.md为例,在gaibash中依次输入以下指令。
git add test.md git commit -m "提交一个测试文件"
也可以add多个文件后再一次性commit,不过如果我们改动的文件很多的话,我们可以用命令git add .一次添加全部,但有一些从来不变或者自动生成的,比如lib,gen,bin文件夹等等,我们可以在代码仓库的根目录下创建一个名为.gitignore的文件,然后编辑里面的内容,把不需提交的文件忽略掉!commit后的-m之后输入的是本次提交的一些声明,比如自己修改了些什么。类似注释。
git add .
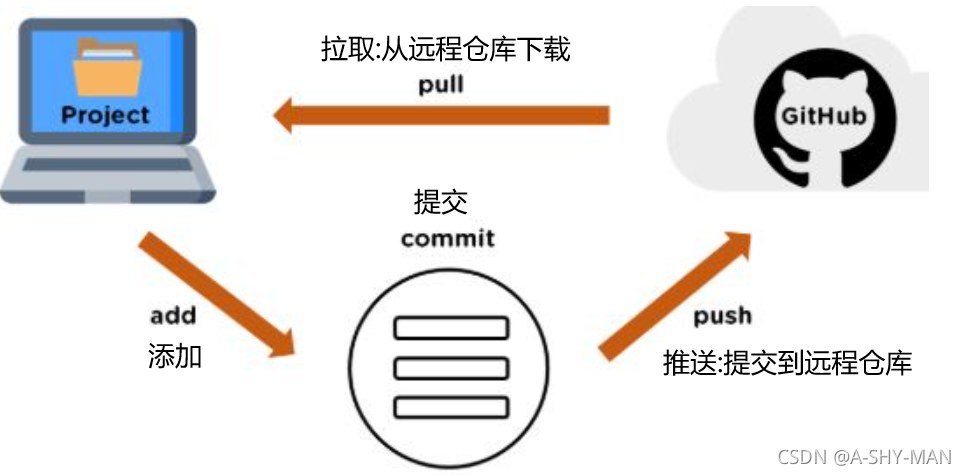
上面说到的Git命令都是在本地执行,如果你想通过Git分享你的代码或者与其他开发人员合作。你就需要将数据放到一台其他开发人员能够连接的服务器上.。一般都是将Github作为远程仓库。主要的流程如下图所示:
clone :从远程直接下载一个版本仓库。 commit :告诉git你的本地仓库你的文件修改了什么。 pull:是将远程仓库的commit 与本地仓库的commit进行的比较。 push: 是将本地库中的最新信息发送给远程库。
由于本地 Git 仓库和 GitHub 仓库之间的传输是通过SSH加密的,因此我们需要查找到通信的公钥和密钥。首选先打开git bash,输入以下内容: (xxxxmail是我们设置的自己设备的邮箱账号。)
$ ssh-keygen -t rsa -C "xxxxmail@example.com"
下图是我的测试,一路回车就行。 在做自己电脑的路径“C:\Users\用户名.ssh”中查看是否有id_rsa、id_rsa.pub文件,如果没有重复步骤1。 用记事本打开并复制id_rsa.pub文件中的内容,然后打开github的设置,进行如下图的步骤。 然后在本地测试连接,打开git bash 输入,显示sucessfully就大功告成了。
ssh -T git@github.com
VScode的好处就不赘述了,一个很有用的东西就是在VScode上我们就可以很好的使用git来管理我们的代码。 VScode中,我们可以直接克隆github上的项目到本地,作用于git clone是一样的。clone到本地后就可以打开项目进行操作;另外我们可以打开本地的文件夹,做为一个项目,然后在vscode中将文件夹初始化为一个仓库。也可以在远程建立一个仓库,将本地的文件上传到远程仓库。 打开一个本地文件后,会有以下选项。
我们以一2中的文件夹为例。文件夹中先不要git init初始化,或者删掉.git文件,然后用VScode打开,直接将文件夹发布到github。第一次可能会要求登录到自己的github。 然后将文件夹中的文件全部同步到远程仓库,这是会自动建立一个master分支。 最终我们会看到在github上出现了一个以我们的文件夹名字为名的仓库。
(1)首先打开local文件夹,初始化存储库,并给test.md中写一些东西。 (2)按以下步骤操作将文件夹中的文件提交到本地仓库 然后添加commit说明 (3)在github新建一个远程仓库 (4)推送到远程仓库(不过最好是先拉取再推送,拉取是将远程仓库的commit 与本地仓库的commit进行的比较;大型项目多人协作的话,如果别人修改了项目内容,你可以拉取项目到本地,这个我们以后再说)
(5)接下来就可以看到github上的内容已经改变了。
直接下载远程仓库,修改后再提交到远程。 (1)首先远程有这样一个仓库,并复制链接 (2)打开vscode,复制链接下载远程仓库,然后选择仓库放置在本地的位置。 (3)然后可以打开clone到本地的仓库,之后的操作就和之前的步骤一样了。