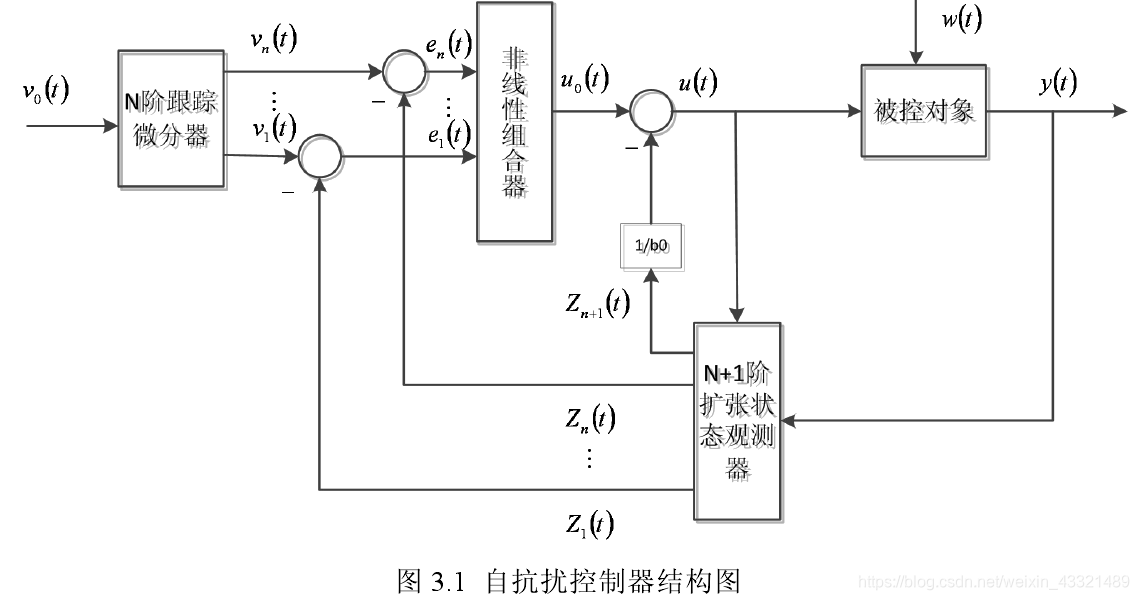
ADRC:自抗扰控制器。 其中,在对自抗扰理论的 研究中,引入了带宽概念这一个崭新的思路,极大的简化了自抗扰技术使用时参数整定 的问题,同时时域分析的方法可以发现利用带宽的概念还有利于解决系统误差;采用经 典控制论中的频率响应法来分析自抗扰技术的性能时,可以看出该方法有着非常优秀的 鲁棒性。尽管使用传统的分析工具分析自抗扰技术性能时,这些工作很简单粗糙,但是 自抗扰技术表现出的结果却非常吸引人。