知识储备
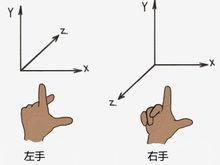
右手系
右手,拇指,食指,中指,分别是x,y,z的正方向。左手系则同理。
旋转矩阵
本质:两个坐标系之间的旋转关系。
用途:旋转点云。
原理:设传感器的坐标系为O1X1Y1Z1,设点云本身有个一随着点云旋转移动的机体系O2X2Y2Z2,点云绕O1X1Y1Z1的旋转就可以看做,O2X2Y2Z2与O1X1Y1Z1之间的旋转关系。
空间坐标的旋转矩阵为:
将空间向量旋转到与某坐标轴平行(同向)
栗子:
右手系下
空间向量a=[x0,y0,z0]
目标:旋转向量a使得a与x轴平行。
第一步:将a绕 z axis 正方向旋转 - acrtan(y0/x0) 得到a’
第二步:将a’绕 y axis 正方向旋转 - acrtan(z0/x0) 得到a’’
此时旋转后的a’’ 与 x axis 平行。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)