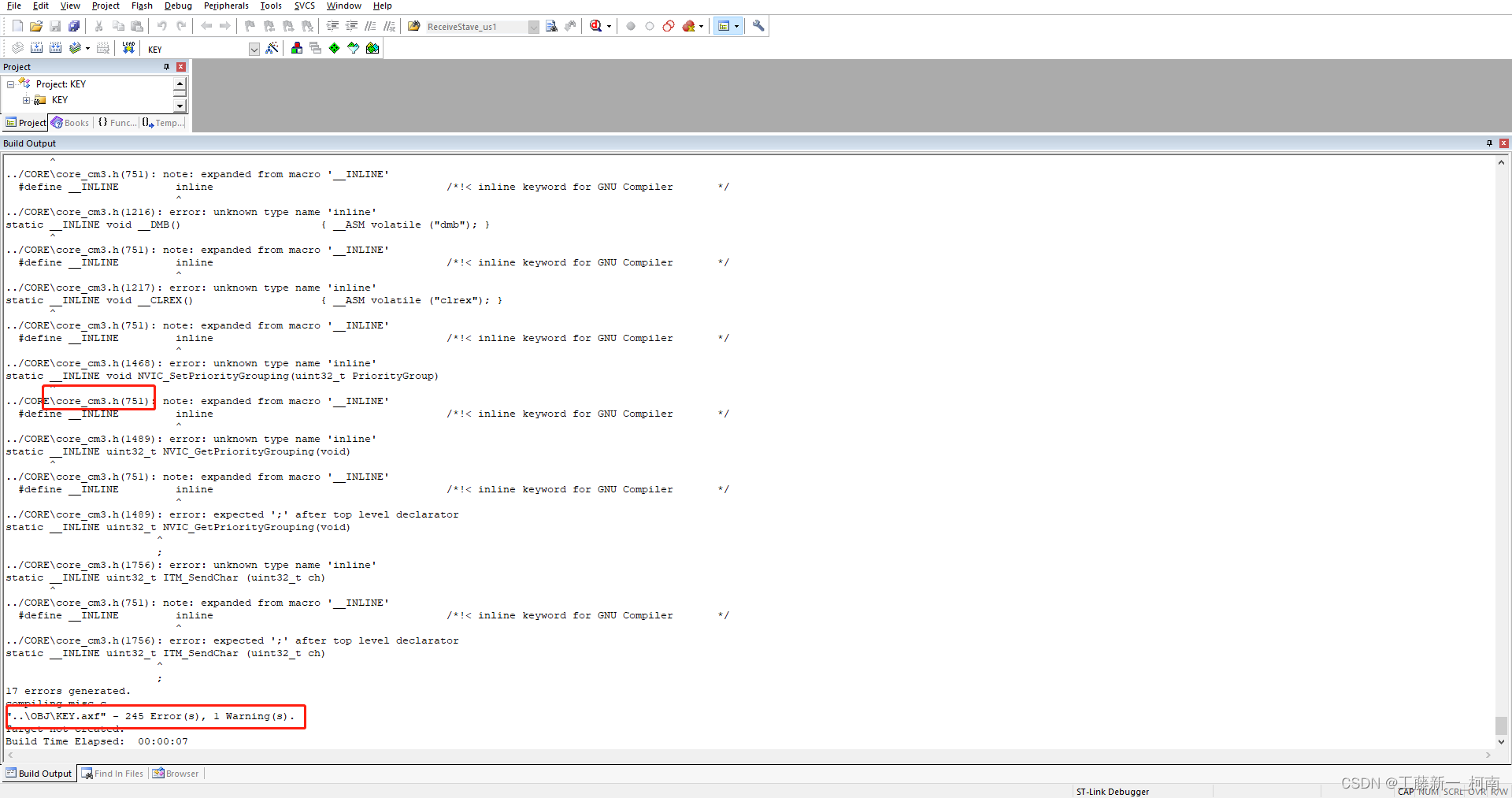
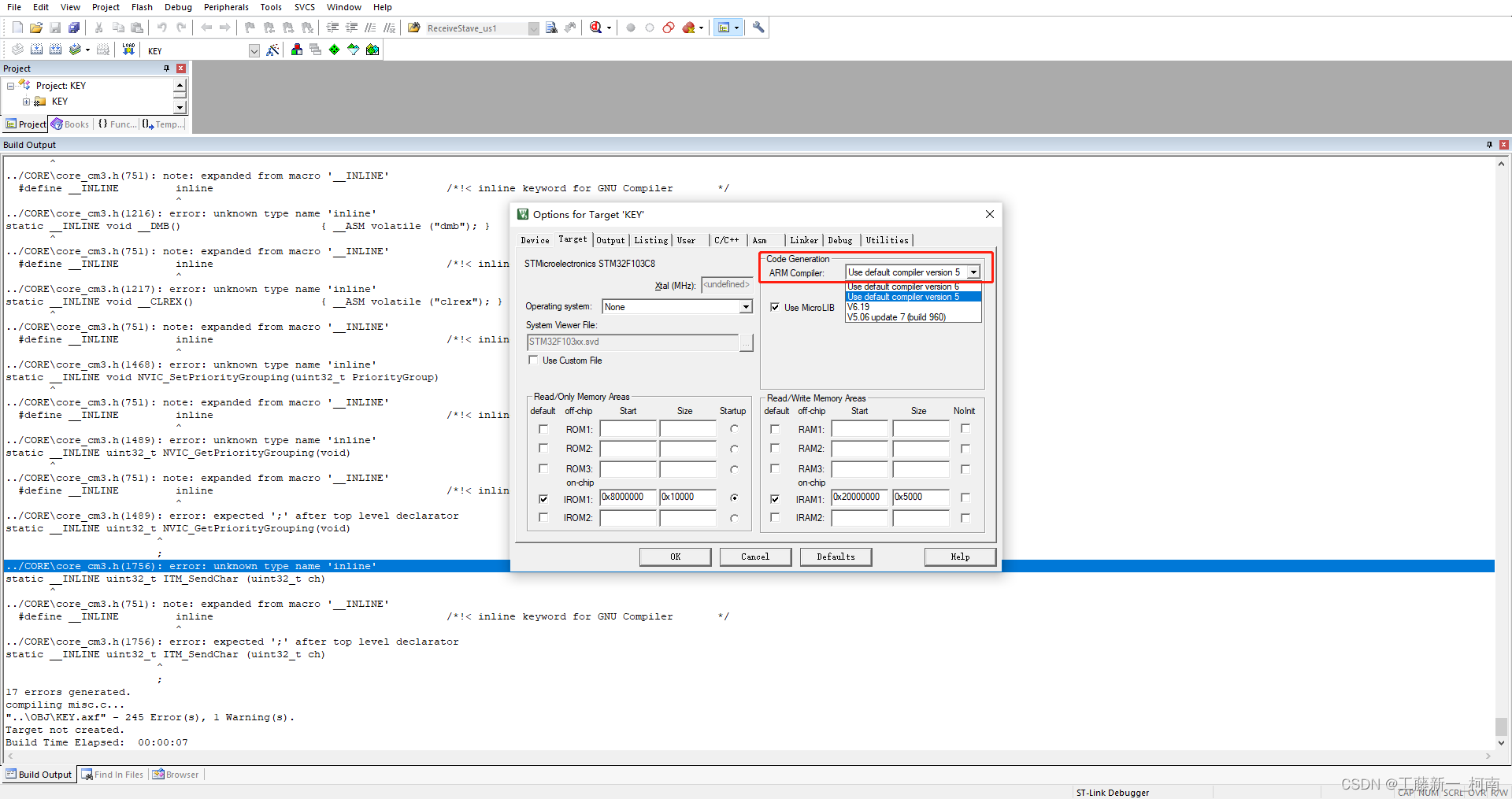
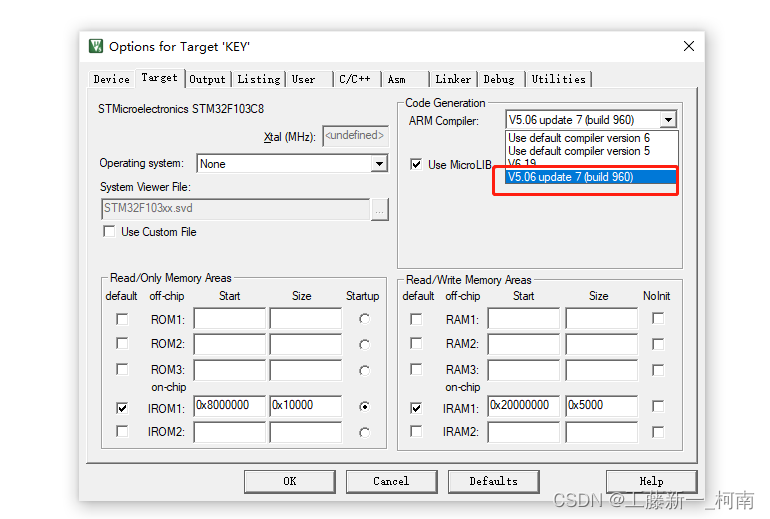
当打开现成的工程项目时,编译出现一堆错误,大部分错误出现关于‘core_cm3.h’这个文件,那么大概率可能跟Keil5的版本有关,如下: 可能原因:打开魔术棒—>Target—>Code Generation中ARM Compiler,看看keil5使用的什么版本,现在最新的keil5版本不会默认安装V5的文件支持,需要自行下载。 下载链接:https://download.csdn.net/download/weixin_43716668/87452237
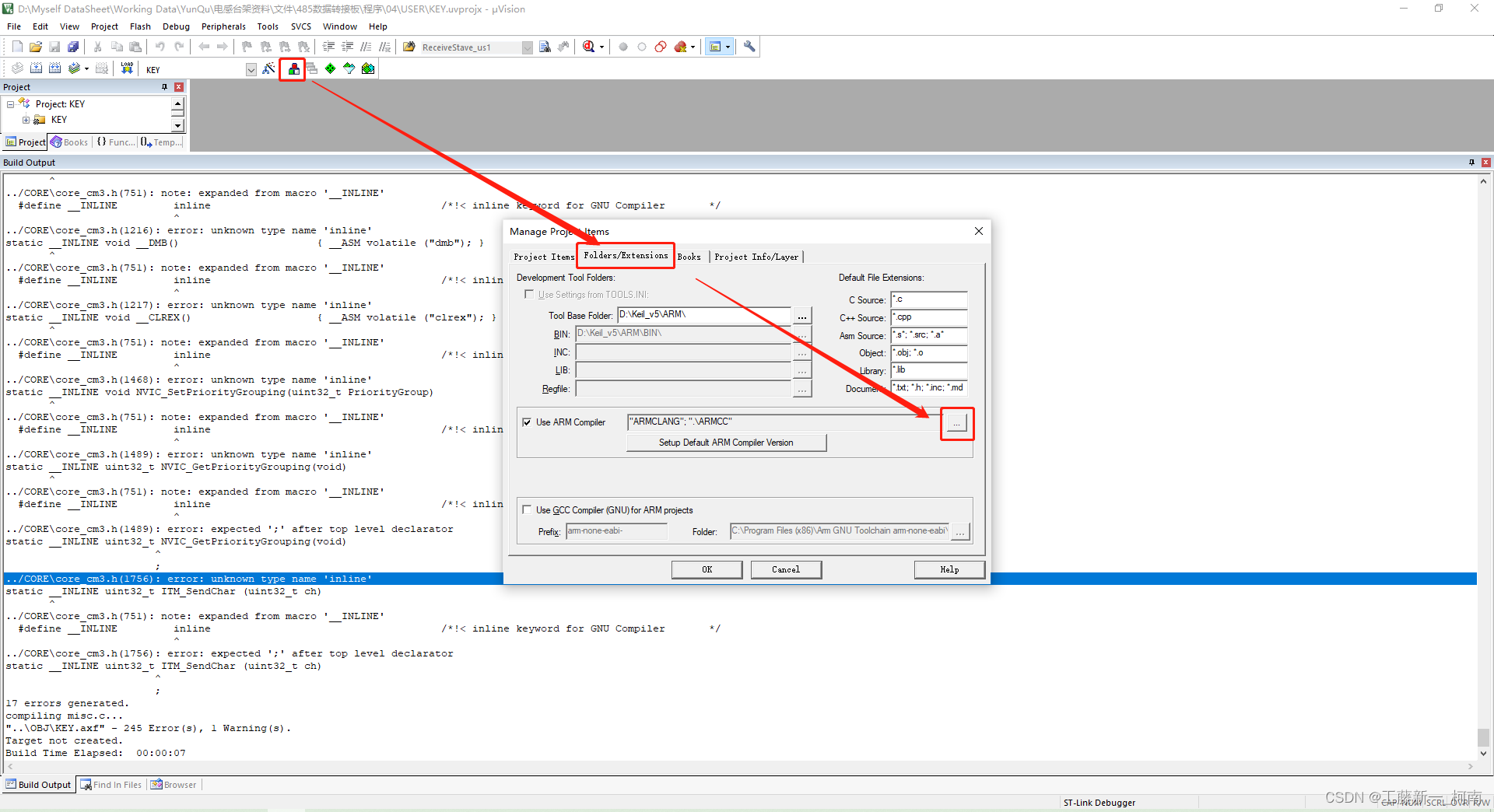
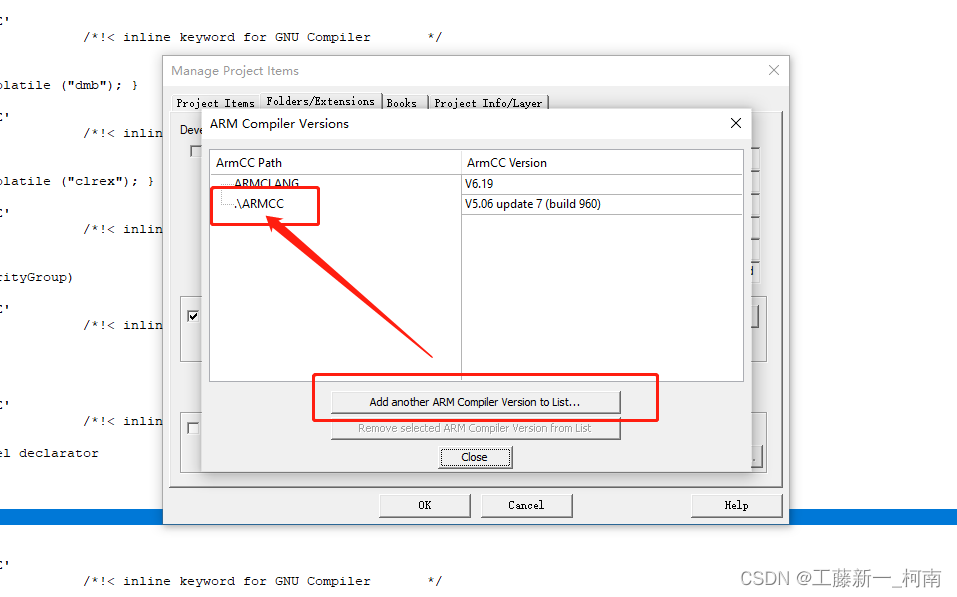
使用说明:下载的安装包解压缩之后直接放置到keil5的安装路径(例如:D:\Keil_v5\ARM…) 然后打开Keil5程序—>Manage Project Items—>Folders/Extensions—>选择路径选项 选中ARMCC文件夹,添加路径 打开魔术棒—>Target—>Code Generation中ARM Compiler,选择V5