一、说明
在开发过程中,比如成员A上传了一次code,而成员B需要测试本次提交的code,但是由于没有搭建ci,成员B就需要自己拉code编译,本文将详细说明编译步骤;
二、步骤
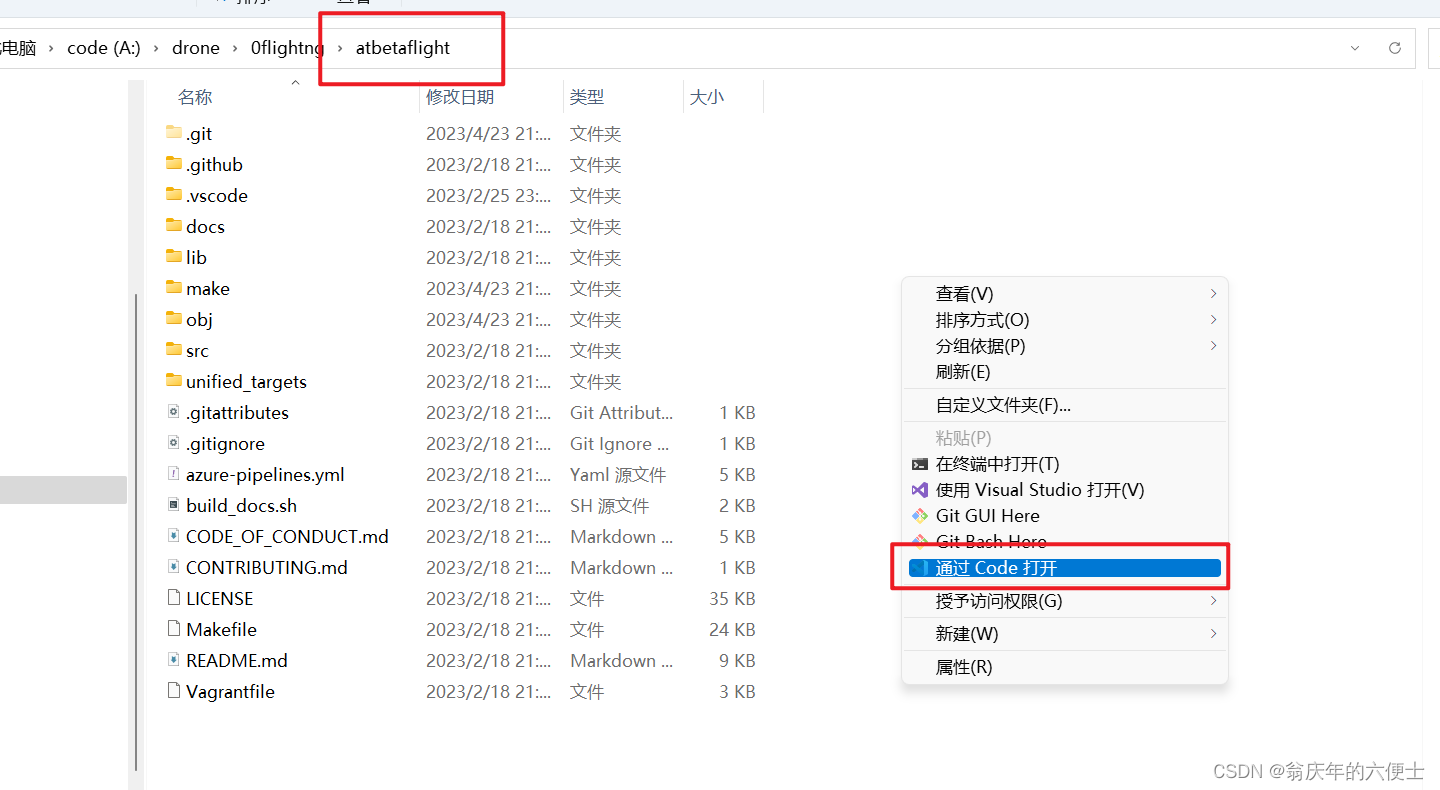
1、使用vscode打开code
在使用git clone下载到code后的文件夹中右键单击;
选择使用code打开
2、获取commit号并切换到指定commit
a、拉取服务器最新code
将小伙伴最近上传到服务器的code,拉到本地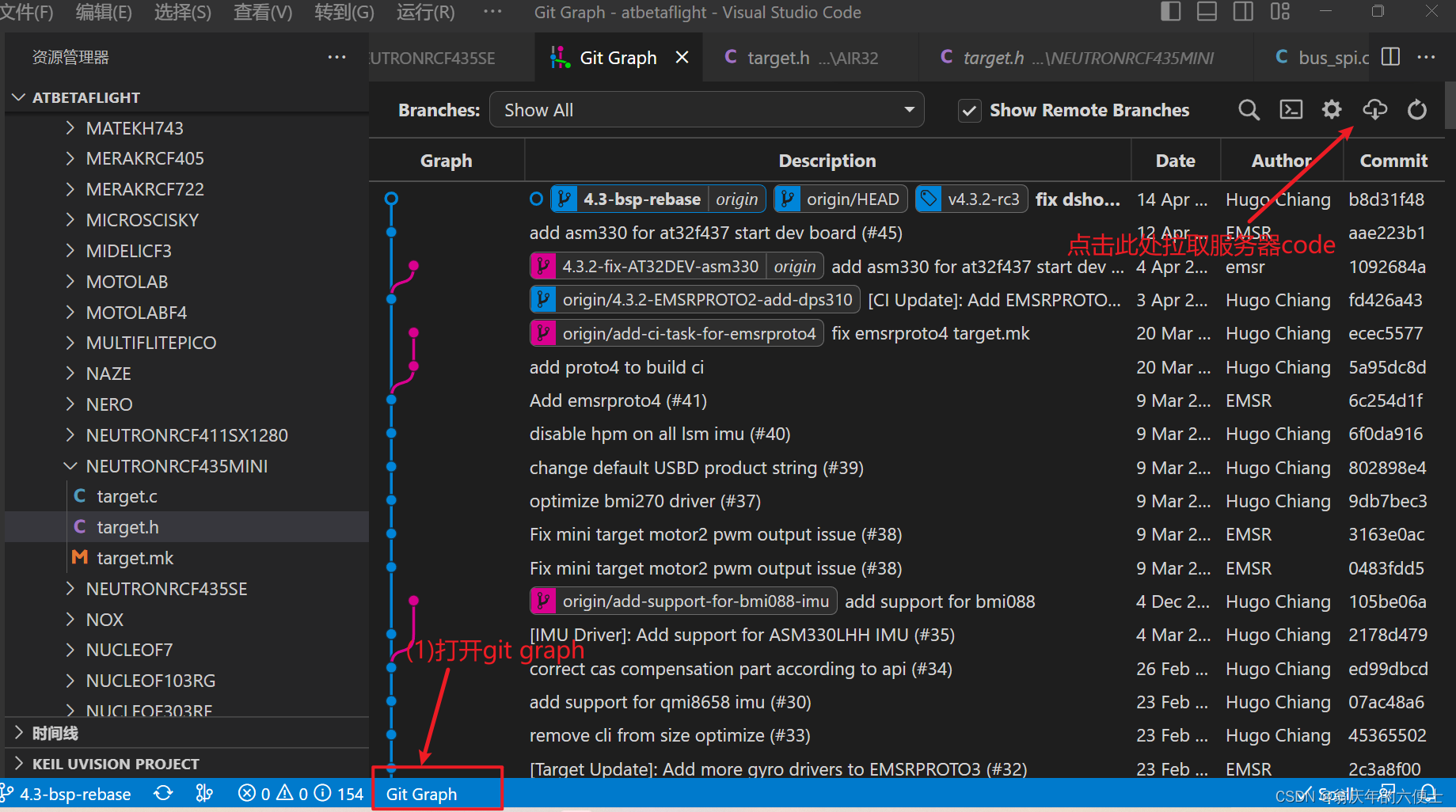
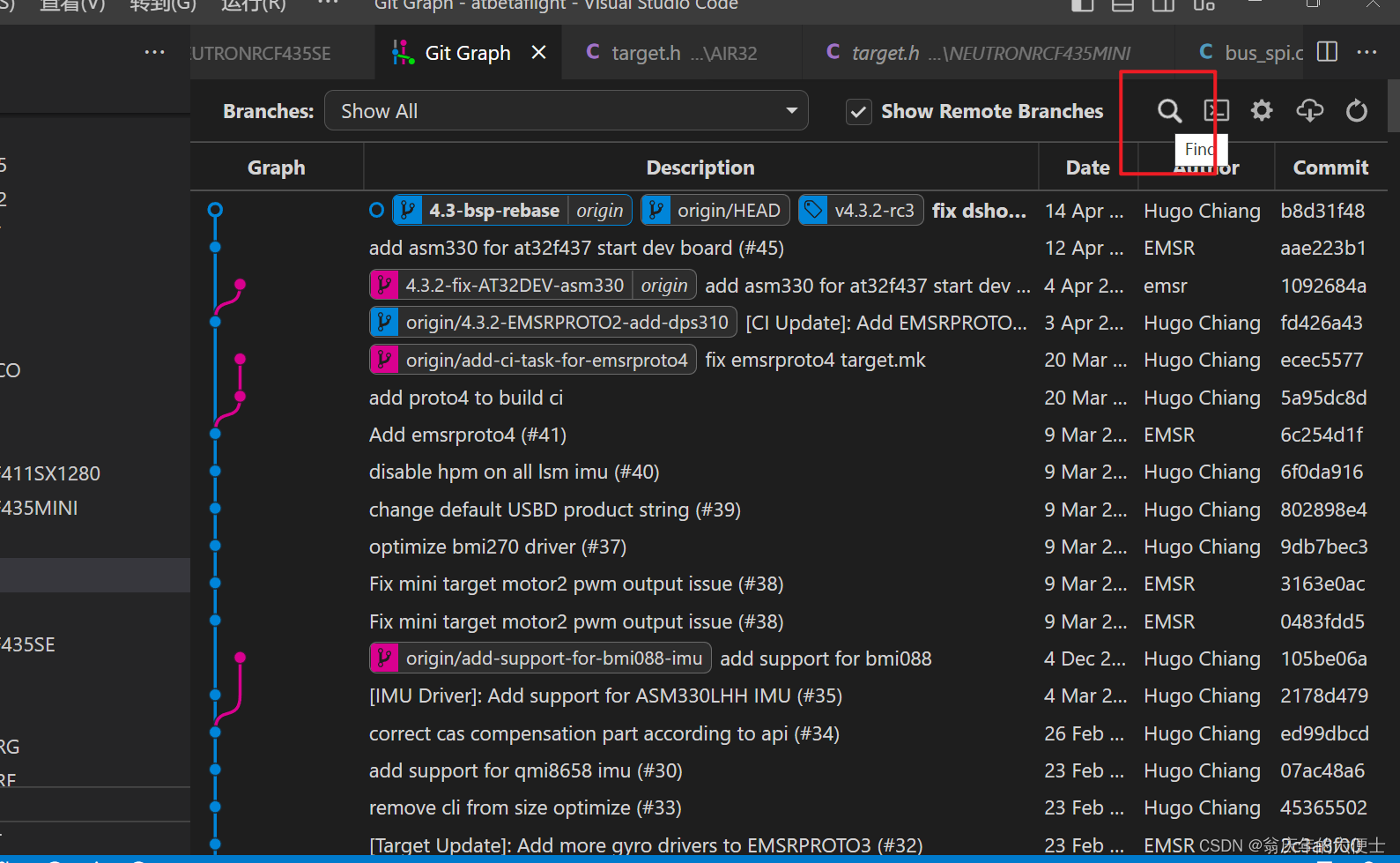
b.搜索指定的commit的号
一般来说,成员A应该告诉成员B,自己上传code之后生成的commit号码;
比如:
A:“hi 老哥,我刚刚更新了code,生成的commit号码是123456,麻烦测试一下吧”
B:“收到,老哥辛苦了!”
将获取到的commit的号码进行搜索;
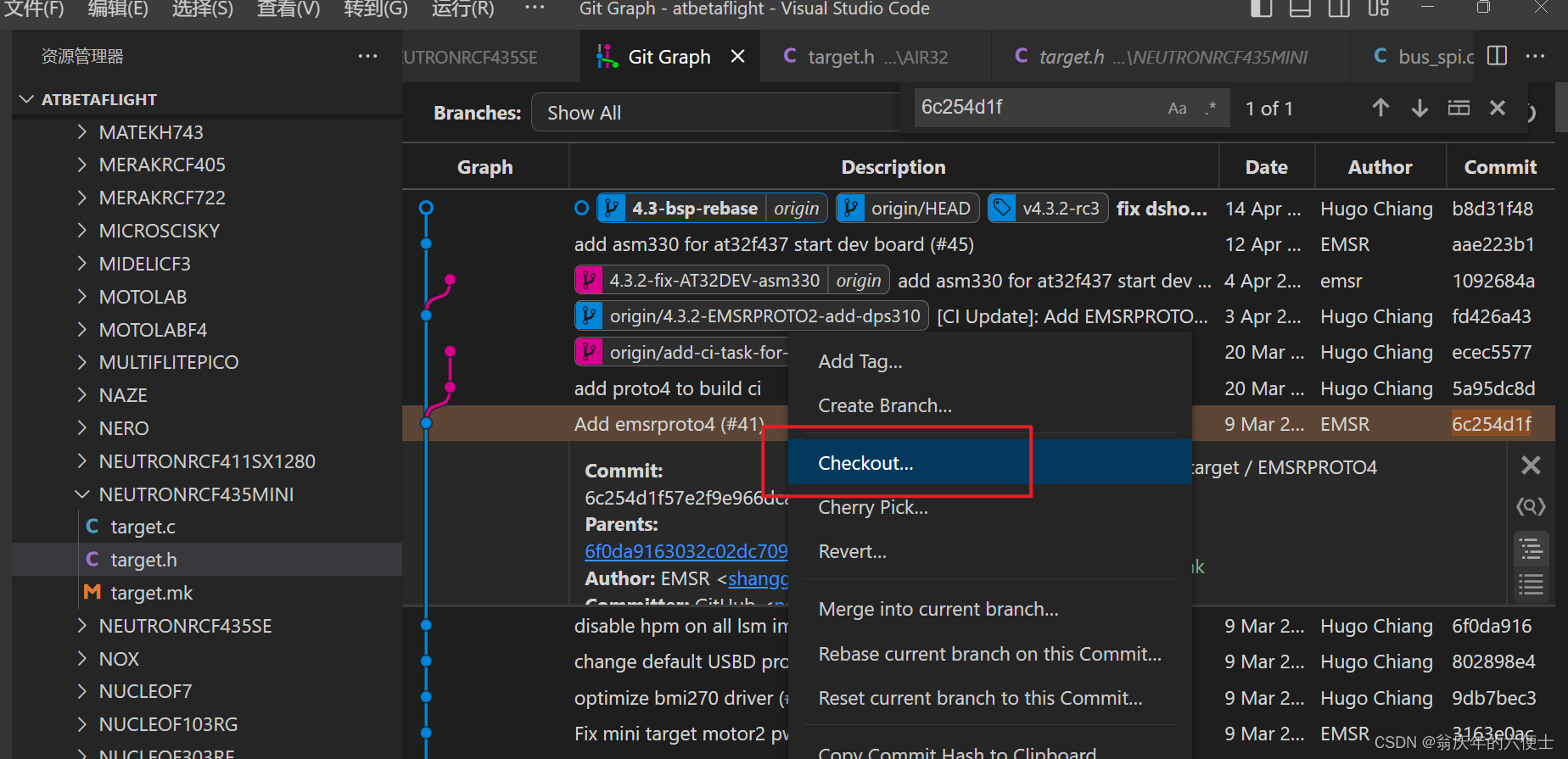
c、将本地code切换到指定的commit版本
3、确认板子的硬件版本(板子型号)
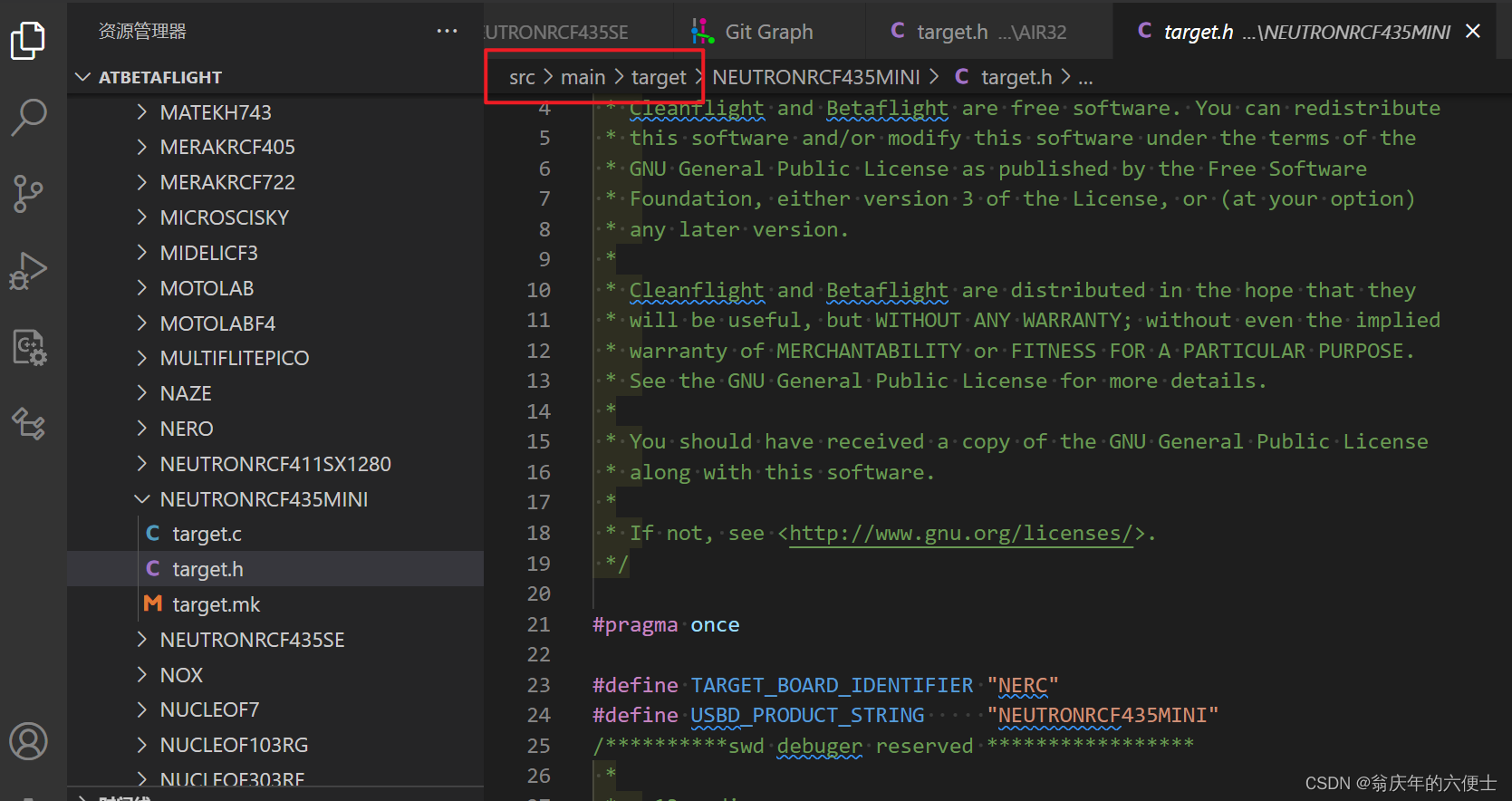
进入目录\atbetaflight\src\main\target
下面有许多target,比如你找到了自己的板子的型号为:
NEUTRONRCF435MINI
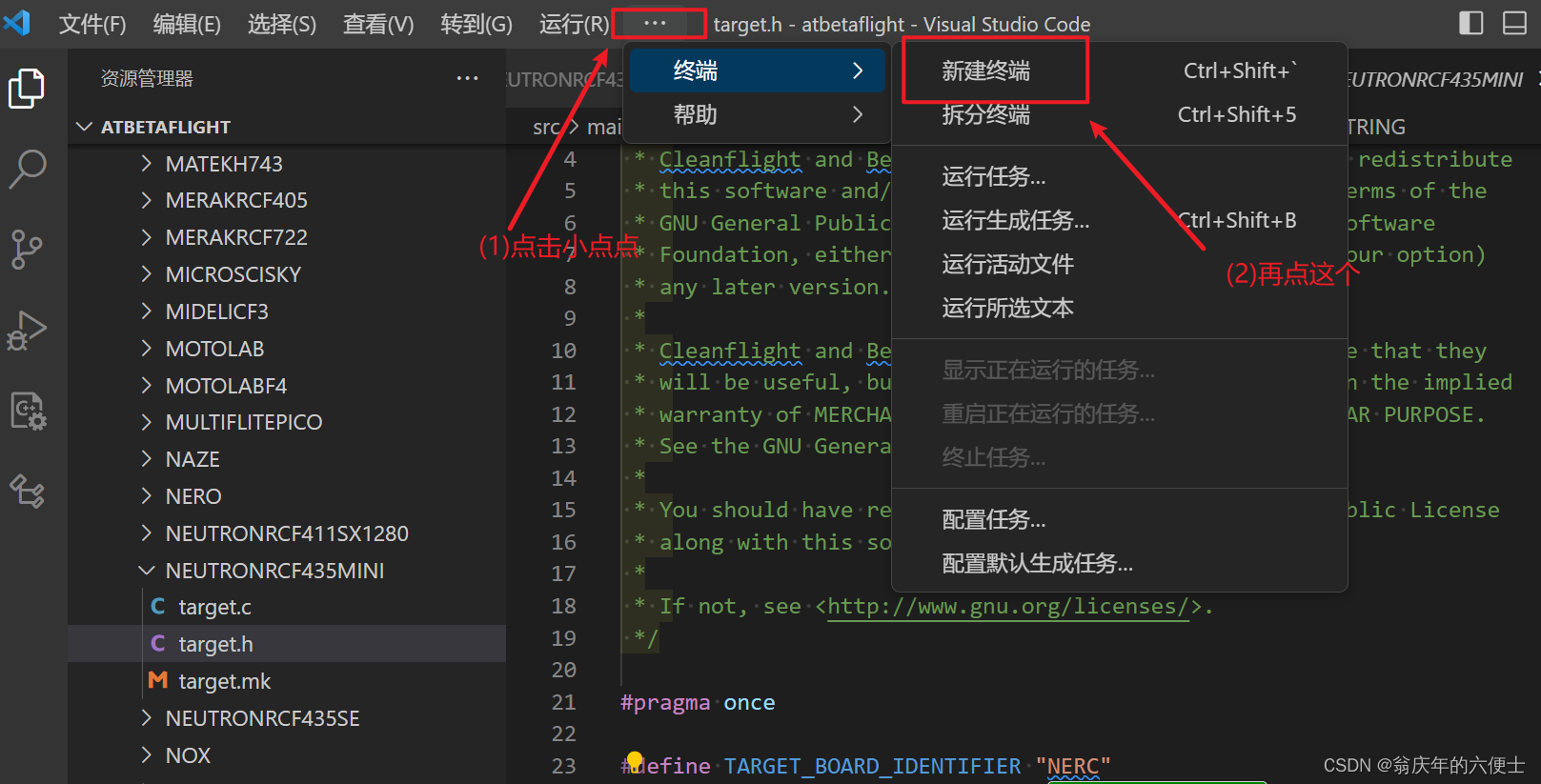
4、开始编译
a.先打开编译终端
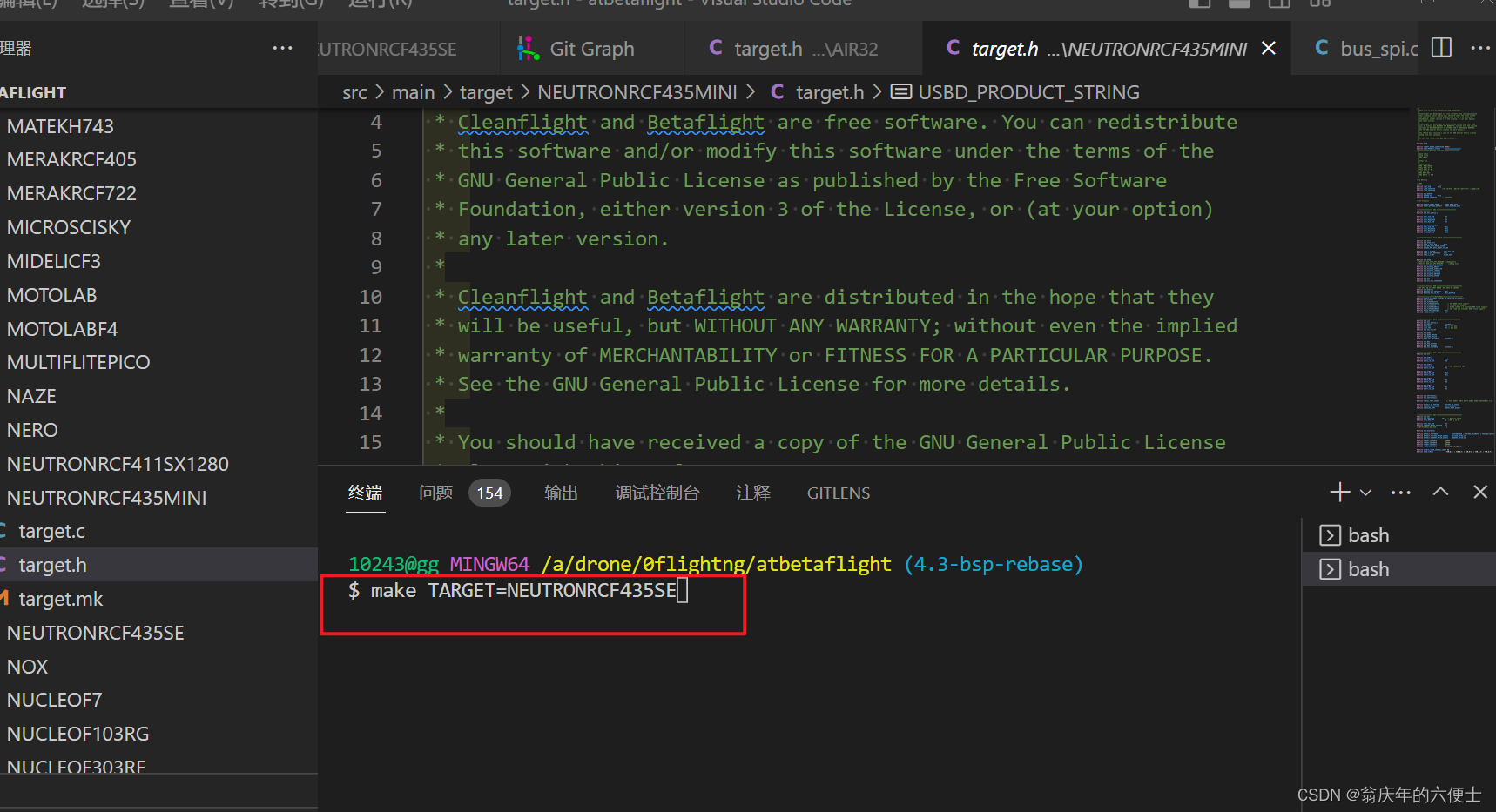
b.输入编译命令
make TARGET=NEUTRONRCF435SE
c.稍等片刻,最后显示如下界面,表示编译成功
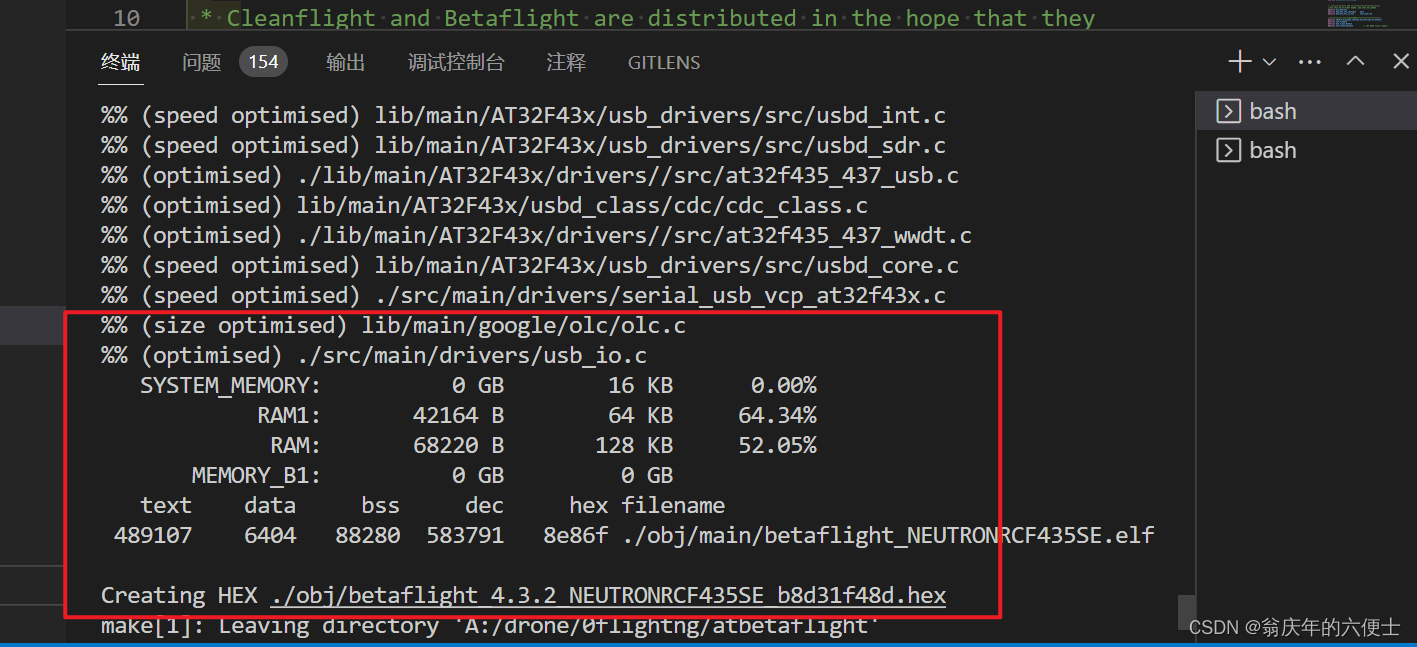
5、获取hex文件
进入目录:
atbetaflight\obj
就找到对应的hex文件了,赶快来试一下吧;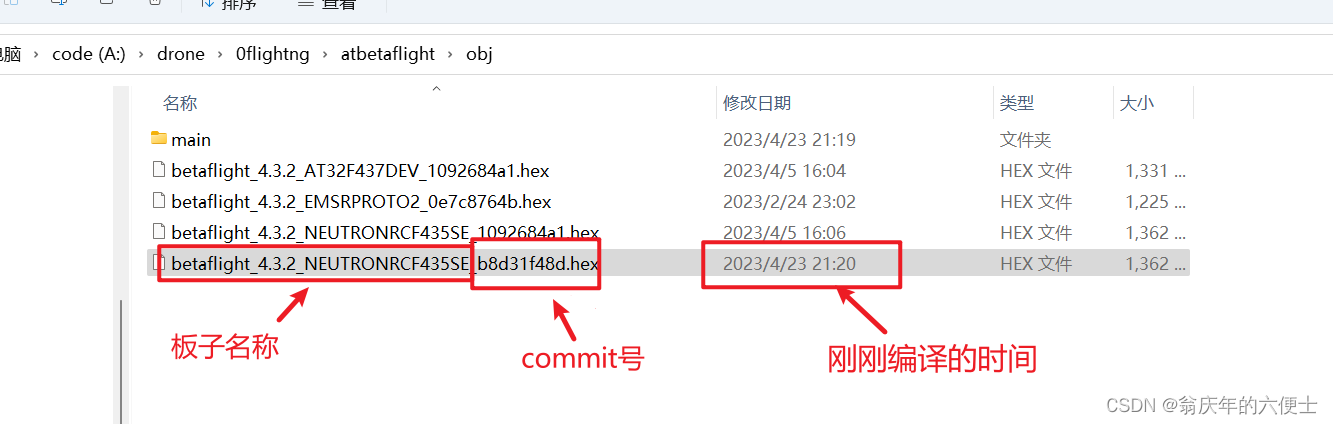
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)