0、前言
- 使用二维码辅助无人机降落,模拟飞机先飞到二维码上空一定的高度,然后切换到command_control模式;飞机会自动识别二维码的位置然后调整自身的X和Y位置信息,同时控制高度进行下降,当高度达到降落的临界值时,执行降落命令;
- 实际测试的时候发现,第一次降落是ok的,但是还想再玩一次,不好意思,飞机直接降落了,只有重启所有节点才行,难道是一锤子买卖?
1、关于问题复现
(1)官方说明

(2)一次降落后无法再次执行
- 当成功进行一次降落之后,想再次升起无人机,进入命令模式,发现无法执行和第一次一样的二维码降落,而是直接执行了land的命令;
3、原因和code修改
(1)原因
- 因为在第一成功降落之后,降落节点的状态机就始终处于land的状态,没有再次进入wating状态;即使再次进入command_control模式,也无法再次去寻找二维码降落,而是直接执行降落命令;
(2)code修改
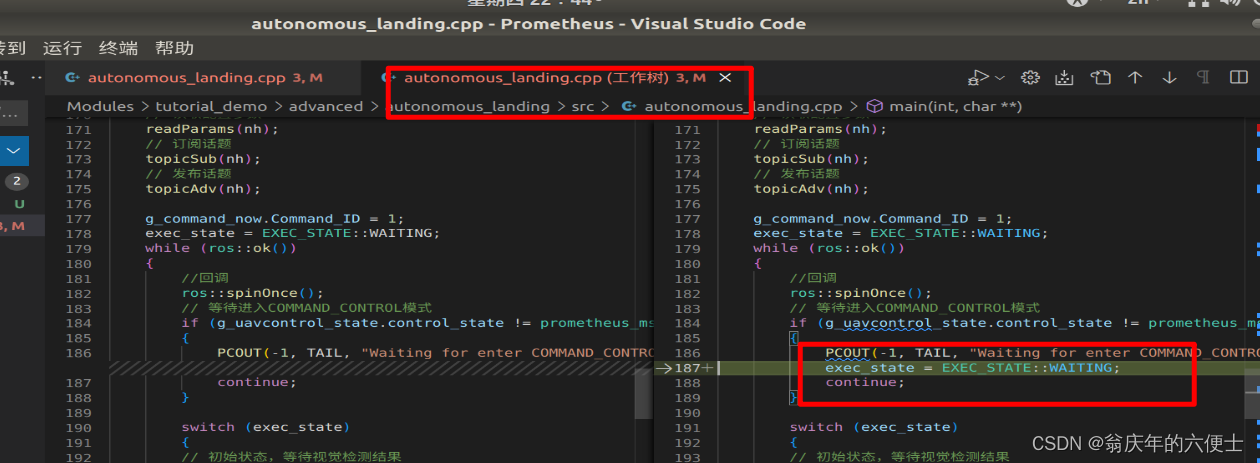
- 很简单,就是在等待进入command_control的时候,将状态机重新恢复为wating状态;
(3)重新编译
- 回到根目录,执行./compile_control.sh 重新编译这个demo;然后就可以反复进行二维码降落测试了;
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)