Harris角点检测
如果某一点在任意方向的一个微小变动都会引起灰度很大的变化,那么我们就把它称之为角点。
角点作为图像上的特征点,包含有重要的信息,在图像融合和目标跟踪及三维重建中有重要的应用价值。它们在图像中可以轻易地定位,同时,在人造物体场景,比如门、窗、桌等处也随处可见。因为角点位于两条边缘的交点处,代表了两个边缘变化的方向上的点,所以它们是可以精确定位的二维特征,甚至可以达到亚像素的精度。又由于其图像梯度有很高的变化,这种变化是可以用来帮助检测角点的。需要注意的是,角点与位于相同强度区域上的点不同,与物体轮廓上的点也不同,因为轮廓点难以在相同的其他物体上精确定位。
harris角点检测是一种直接基于灰度图像的角点提取算法,稳定性高,尤其对L型角点检测精度高。但由于采用了高斯滤波,运算速度相对较慢,角点信息有丢失和位置偏移的现象,而且角点提取有聚簇现象。
void cornerHarris(InputArray src,outputArray dst, int blockSize,int ksize,double k, intborderType=BORDER_DEFAULT )
#include <opencv2/opencv.hpp>
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/imgproc/imgproc.hpp"
using namespace cv;
using namespace std;
#define WINDOW_NAME1 "【程序窗口1】"
#define WINDOW_NAME2 "【程序窗口2】"
Mat g_srcImage, g_srcImage1, g_grayImage;
int thresh = 30;
int max_thresh = 175;
void on_CornerHarris(int, void*);
int main(int argc, char** argv)
{
g_srcImage = imread("1.jpg", 1);
if (!g_srcImage.data) { printf("读取图片错误,请确定目录下是否有imread函数指定的图片存在~! \n"); return false; }
imshow("原始图", g_srcImage);
g_srcImage1 = g_srcImage.clone();
cvtColor(g_srcImage1, g_grayImage, COLOR_BGR2GRAY);
namedWindow(WINDOW_NAME1, WINDOW_AUTOSIZE);
createTrackbar("阈值: ", WINDOW_NAME1, &thresh, max_thresh, on_CornerHarris);
on_CornerHarris(0, 0);
waitKey(0);
return(0);
}
void on_CornerHarris(int, void*)
{
Mat dstImage;
Mat normImage;
Mat scaledImage;
dstImage = Mat::zeros(g_srcImage.size(), CV_32FC1);
g_srcImage1 = g_srcImage.clone();
cornerHarris(g_grayImage, dstImage, 2, 3, 0.04, BORDER_DEFAULT);
normalize(dstImage, normImage, 0, 255, NORM_MINMAX, CV_32FC1, Mat());
convertScaleAbs(normImage, scaledImage);
for (int j = 0; j < normImage.rows; j++)
{
for (int i = 0; i < normImage.cols; i++)
{
if ((int)normImage.at<float>(j, i) > thresh + 80)
{
circle(g_srcImage1, Point(i, j), 5, Scalar(10, 10, 255), 2, 8, 0);
circle(scaledImage, Point(i, j), 5, Scalar(0, 10, 255), 2, 8, 0);
}
}
}
imshow(WINDOW_NAME1, g_srcImage1);
imshow(WINDOW_NAME2, scaledImage);
}

Shi-Tomasi角点检测
void goodFeaturesToTrack (InputArray image,outputArray corners,int maxCorners,double qualityLevel,double minDistance,InputArray mask=noArray () ,int blockSize=3,bool useHarrisDetector=false,double k=0.04 )
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include <iostream>
using namespace cv;
using namespace std;
#define WINDOW_NAME "【Shi-Tomasi角点检测】"
Mat g_srcImage, g_grayImage;
int g_maxCornerNumber = 33;
int g_maxTrackbarNumber = 500;
RNG g_rng(12345);
void on_GoodFeaturesToTrack(int, void*)
{
if (g_maxCornerNumber <= 1) { g_maxCornerNumber = 1; }
vector<Point2f> corners;
double qualityLevel = 0.01;
double minDistance = 10;
int blockSize = 3;
double k = 0.04;
Mat copy = g_srcImage.clone();
goodFeaturesToTrack(g_grayImage,
corners,
g_maxCornerNumber,
qualityLevel,
minDistance,
Mat(),
blockSize,
false,
k);
cout << "\t>此次检测到的角点数量为:" << corners.size() << endl;
int r = 4;
for (int i = 0; i < corners.size(); i++)
{
circle(copy, corners[i], r, Scalar(g_rng.uniform(0, 255), g_rng.uniform(0, 255),
g_rng.uniform(0, 255)), -1, 8, 0);
}
imshow(WINDOW_NAME, copy);
}
int main()
{
g_srcImage = imread("1.jpg", 1);
cvtColor(g_srcImage, g_grayImage, COLOR_BGR2GRAY);
namedWindow(WINDOW_NAME, WINDOW_AUTOSIZE);
createTrackbar("最大角点数", WINDOW_NAME, &g_maxCornerNumber, g_maxTrackbarNumber, on_GoodFeaturesToTrack);
imshow(WINDOW_NAME, g_srcImage);
on_GoodFeaturesToTrack(0, 0);
waitKey(0);
return(0);
}

亚像素级角点检测
void cornerSubPix(InputArray image,InputoutputArray corners,size winsize,size zerozone,TermCriteria criteria)
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include <iostream>
using namespace cv;
using namespace std;
#define WINDOW_NAME "【亚像素级角点检测】"
Mat g_srcImage, g_grayImage;
int g_maxCornerNumber = 33;
int g_maxTrackbarNumber = 500;
RNG g_rng(12345);
void on_GoodFeaturesToTrack(int, void*)
{
if (g_maxCornerNumber <= 1) { g_maxCornerNumber = 1; }
vector<Point2f> corners;
double qualityLevel = 0.01;
double minDistance = 10;
int blockSize = 3;
double k = 0.04;
Mat copy = g_srcImage.clone();
goodFeaturesToTrack(g_grayImage,
corners,
g_maxCornerNumber,
qualityLevel,
minDistance,
Mat(),
blockSize,
false,
k);
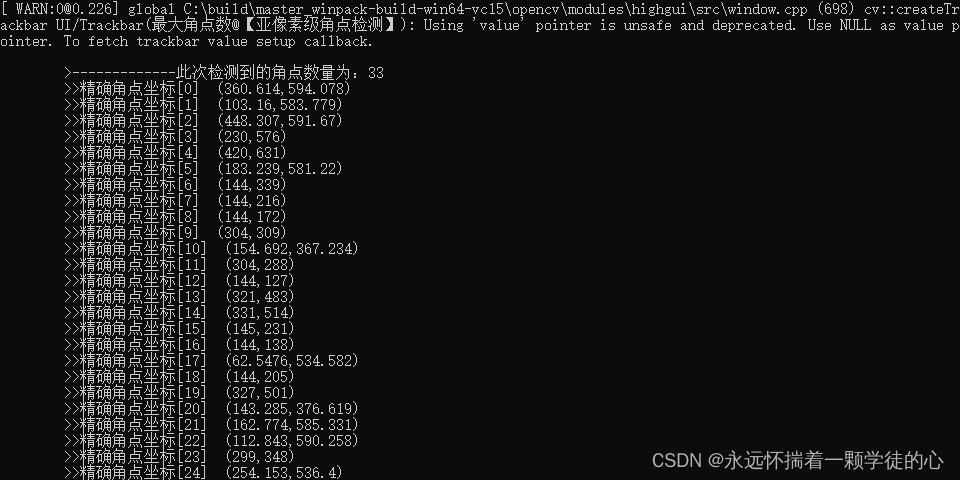
cout << "\n\t>-------------此次检测到的角点数量为:" << corners.size() << endl;
int r = 4;
for (unsigned int i = 0; i < corners.size(); i++)
{
circle(copy, corners[i], r, Scalar(g_rng.uniform(0, 255), g_rng.uniform(0, 255),
g_rng.uniform(0, 255)), -1, 8, 0);
}
imshow(WINDOW_NAME, copy);
Size winSize = Size(5, 5);
Size zeroZone = Size(-1, -1);
TermCriteria criteria = TermCriteria(TermCriteria::EPS + TermCriteria::MAX_ITER, 40, 0.001);
cornerSubPix(g_grayImage, corners, winSize, zeroZone, criteria);
for (int i = 0; i < corners.size(); i++)
{
cout << " \t>>精确角点坐标[" << i << "] (" << corners[i].x << "," << corners[i].y << ")" << endl;
}
}
int main()
{
g_srcImage = imread("1.jpg", 1);
cvtColor(g_srcImage, g_grayImage, COLOR_BGR2GRAY);
namedWindow(WINDOW_NAME, WINDOW_AUTOSIZE);
createTrackbar("最大角点数", WINDOW_NAME, &g_maxCornerNumber, g_maxTrackbarNumber, on_GoodFeaturesToTrack);
imshow(WINDOW_NAME, g_srcImage);
on_GoodFeaturesToTrack(0, 0);
waitKey(0);
return(0);
}

本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)