镭神CH128x1系列激光雷达使用记录
文章目录
- 镭神CH128x1系列激光雷达使用记录
- 前言
- 一、操作步骤
-
- 二、实验
- 1. 雷达控制器上的接口:
- 2.接口定义
- 3. Rviz中显示效果
- 总结
- 致谢
前言
- 本条博客的需求来源于自动驾驶中激光雷达的使用与调试。
一、操作步骤
1. PC连接雷达
- 连接好各个连线,上电,在网络设置的有线连接中,设置网络参数:
- IPv4的方式设置为
手动. - 设置地址中的地址为:
192.168.1.102,子网掩码为:255.255.255.0 - 点击
应用以保存配置。 - 在终端中运行命令:
ping 192.168.1.102,理论上可以连接成功。 - pc与lidar连接完成。
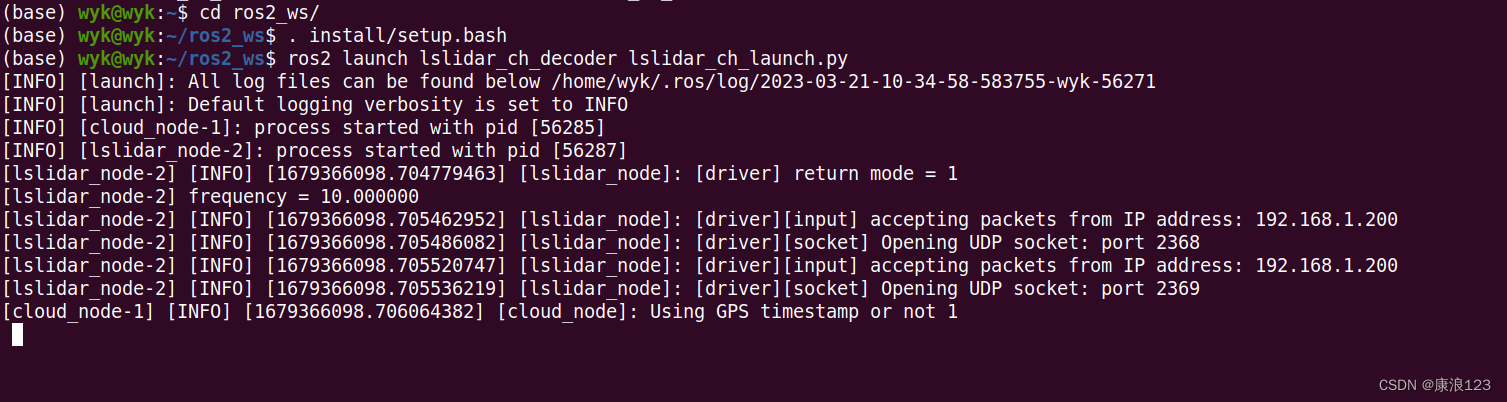
- 下面开始进入编译过程:进入工作空间目录(src文件夹的前一级)下,运行命令
colcon build进行编译。 - 编译完成后,运行命令
source install/setup.bash - 然后在工作空间目录下运行命令:
ros2 launch lslidar_ch_decoder lslidar_ch_launch.py - Rviz中显示命令:
ros2 run rviz2 rviz2,fixed frame设置为:lslidar
二、实验
1. 雷达控制器上的接口:

2.接口定义

3. Rviz中显示效果

总结
本文主要介绍了在Ubuntu中配置镭神激光雷达驱动的具体步骤。
致谢
向开源致敬,向各位博主致敬!
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)