一、显卡驱动
提前安装好nvidia驱动,windows一般都自动安装了nvidia驱动了
没有安装驱动可以去官网下载驱动
https://www.geforce.cn/drivers
选择自己对应的显卡驱动,默认安装就可以了。
下载之前查看自己显卡驱动和cuda版本号之间的关系,如下图所示,然后进行选择性安装。
https://docs.nvidia.com/cuda/cuda-toolkit-release-notes/index.html

nvidia驱动版本号:打开终端,输入nvidia-smi.exe回车进行查看,如下图红色框标出来所示:

cuda下载https://developer.nvidia.com/cuda-toolkit-archive:


cudnn下载
cudnn链接:https://developer.nvidia.com/cudnn





二、安装cuda
电脑nvidia显卡驱动已经安装了
安装cuda软件,前提我已经安装好vs2017了。可以不安装visual studio c++编译器.
安装路径默认,尽量不要改动方面以后查找路径



安装vs c++编译软件直接如下面操作就可以了

如果没有安装vs c++编译软件需要将visual studio integration勾掉,如下图所示






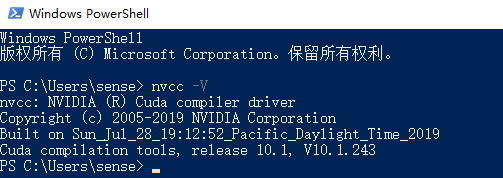
测试安装成功
三、安装cudnn
解压cudnn-10.1-windows10-x64-v7.6.5.32.zip
cuda默认安装路径
C:\Program Files\NVIDIA GPU Computing Toolkit\CUDA\v10.1

四、验证cuda是否安装成功
安装的过程系统已经自动将cuda配置好环境变量了
验证是否配置成功,主要使用CUDA内置的deviceQuery.exe 和 bandwithTest.exe:
首先win+R启动cmd或者powershell,cd到安装目录下的 ...\extras\demo_suite,然后分别执行bandwidthTest.exe和deviceQuery.exe,应该得到下图:

Result=PASS表示cuda安装成功了
参考:
- https://blog.csdn.net/u010618587/article/details/82940528
- https://blog.csdn.net/u011473714/article/details/95042856
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)