这里介绍了介绍了使用 Gazbo/SITL 中模拟的四轴飞行器 Offboard 控制的基础知识。
如何通过MAVROS功能包的offboard模式控制gazebo中的飞机起飞到高度两米。
主要过程:
要先解锁无人机,在切换无人机到offboard模式。 我们每隔五秒去检查一下与飞控的连接等是否一切正常。 在同一个循环中,我们按照指定的频率持续发送期望点信息给飞控。
官网教程:Macros 功能包的 offboard 模式控制例程
CSDN教程:mavros 外部控制例程
目录
一、建立工作空间以及功能包
二、介绍C++代码控制方法
开始仿真
三、介绍Python代码控制方法
一、建立工作空间以及功能包
1.新建工作空间
mkdir -p uav_test_ws/src
2.新建功能包
cd uav_test_ws/src
catkin_create_pkg offboard roscpp std_msgs geometry_msgs mavros_msgs
二、介绍C++代码控制方法
1.建一个cpp源文件用来作为这个功能包的执行文件
cd offboard/src
gedit offboard_node.cpp
2.然后把代码复制到这个文件里面,保存退出
#include <ros/ros.h>
#include <geometry_msgs/PoseStamped.h>
#include <mavros_msgs/CommandBool.h>
#include <mavros_msgs/SetMode.h>
#include <mavros_msgs/State.h>
mavros_msgs::State current_state;
void state_cb(const mavros_msgs::State::ConstPtr& msg){
current_state = *msg;
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "offb_node");
ros::NodeHandle nh;
ros::Subscriber state_sub = nh.subscribe<mavros_msgs::State>
("mavros/state", 10, state_cb);
ros::Publisher local_pos_pub = nh.advertise<geometry_msgs::PoseStamped>
("mavros/setpoint_position/local", 10);
ros::ServiceClient arming_client = nh.serviceClient<mavros_msgs::CommandBool>
("mavros/cmd/arming");
ros::ServiceClient set_mode_client = nh.serviceClient<mavros_msgs::SetMode>
("mavros/set_mode");
//the setpoint publishing rate MUST be faster than 2Hz
ros::Rate rate(20.0);
// wait for FCU connection
while(ros::ok() && !current_state.connected){
ros::spinOnce();
rate.sleep();
}
geometry_msgs::PoseStamped pose;
pose.pose.position.x = 0;
pose.pose.position.y = 0;
pose.pose.position.z = 2;
//send a few setpoints before starting
for(int i = 100; ros::ok() && i > 0; --i){
local_pos_pub.publish(pose);
ros::spinOnce();
rate.sleep();
}
mavros_msgs::SetMode offb_set_mode;
offb_set_mode.request.custom_mode = "OFFBOARD";
mavros_msgs::CommandBool arm_cmd;
arm_cmd.request.value = true;
ros::Time last_request = ros::Time::now();
while(ros::ok()){
if( current_state.mode != "OFFBOARD" &&
(ros::Time::now() - last_request > ros::Duration(5.0))){
if( set_mode_client.call(offb_set_mode) &&
offb_set_mode.response.mode_sent){
ROS_INFO("Offboard enabled");
}
last_request = ros::Time::now();
} else {
if( !current_state.armed &&
(ros::Time::now() - last_request > ros::Duration(5.0))){
if( arming_client.call(arm_cmd) &&
arm_cmd.response.success){
ROS_INFO("Vehicle armed");
}
last_request = ros::Time::now();
}
}
local_pos_pub.publish(pose);
ros::spinOnce();
rate.sleep();
}
return 0;
}
部分代码解析:
#include <ros/ros.h>
#include <geometry_msgs/PoseStamped.h>
#include <mavros_msgs/CommandBool.h>
#include <mavros_msgs/SetMode.h>
#include <masvros_msgs/State.h>
//mavros_msgs功能包中包含操作mavros包中服务和主题所需要的自定义消息文件(所以前面在创建功能包的时候就加入了那两个功能包)
mavros_msgs::State current_state;
void state_cb(const mavros_msgs::State::ConstPtr& msg){
current_state = *msg;
}
//我们创建一个简单的回调函数来存储飞控当前的状态。这将使得我们可以检测飞机的各项状态,比如是否连接上mavros功能包、是否解锁、当前模式
int main(int argc, char **argv)
{
ros::init(argc, argv, "offb_node");
ros::NodeHandle nh;
ros::Subscriber state_sub = nh.subscribe<mavros_msgs::State>
("mavros/state", 10, state_cb);
ros::Publisher local_pos_pub = nh.advertise<geometry_msgs::PoseStamped>
("mavros/setpoint_position/local", 10);
ros::ServiceClient arming_client = nh.serviceClient<mavros_msgs::CommandBool>
("mavros/cmd/arming");
ros::ServiceClient set_mode_client = nh.serviceClient<mavros_msgs::SetMode>
("mavros/set_mode");
//我们初始化了一个发布者来发布本地的控制指令,还按初始化了请求解锁和更改模式的服务。这节点的名字可能不一样,要看你自己的计算的来看。如果从一开始你就按照官网的操作来的话,不用改就行了。
//the setpoint publishing rate MUST be faster than 2Hz
//发布的速率必须大于2Hz,因为px4飞行栈的两个机外(offboard)控制指令之间有500ms的时限(也就是2Hz的速率)不然的话,会回到前面的模式当中去。并且还要考虑可能的延迟。这也是我们推荐从位置控制(POSCTL)模式进入机外控制模式的原因。这样一来,如果飞机意外脱离了机外控制模式,飞机将会停在当前轨道并悬停。
ros::Rate rate(20.0);
// wait for FCU connection
//我们在发布对应消息之前,我们需要等待飞控和mavros模块的连接。在收到心跳包heartbeat message之后,代码便会跳出这个循环
while(ros::ok() && !current_state.connected){
ros::spinOnce();
rate.sleep();
}
geometry_msgs::PoseStamped pose;
pose.pose.position.x = 0;
pose.pose.position.y = 0;
pose.pose.position.z = 2;
//尽管PX4飞控在NED坐标系(导航坐标系)下操控飞机,但MAVROS是在ENU系(站心极坐标系)下进行指令传输的。 这也就是为什么我们设置z为+2
//send a few setpoints before starting
//在切换到offboard模式之前,你必须先发送一些期望点信息到飞控中。不然飞控会拒绝切换到offboard模式。在这里,100可以是随意设定的一个值。
for(int i = 100; ros::ok() && i > 0; --i){
local_pos_pub.publish(pose);
ros::spinOnce();
rate.sleep();
}
mavros_msgs::SetMode offb_set_mode;
offb_set_mode.request.custom_mode = "OFFBOARD";
//我们在这里切换模式为"OFFBOARD"
mavros_msgs::CommandBool arm_cmd;
arm_cmd.request.value = true;
ros::Time last_request = ros::Time::now();
while(ros::ok()){
if( current_state.mode != "OFFBOARD" &&
(ros::Time::now() - last_request > ros::Duration(5.0))){
if( set_mode_client.call(offb_set_mode) &&
offb_set_mode.response.mode_sent){
ROS_INFO("Offboard enabled");
}
last_request = ros::Time::now();
} else {
if( !current_state.armed &&
(ros::Time::now() - last_request > ros::Duration(5.0))){
if( arming_client.call(arm_cmd) &&
arm_cmd.response.success){
ROS_INFO("Vehicle armed");
}
last_request = ros::Time::now();
}
}
local_pos_pub.publish(pose);
ros::spinOnce();
rate.sleep();
}
return 0;
}
3.修改CMakeLists.txt为编译做准备
cd ..
gedit CMakeLists.txt
在最后添加如下内容后保存退出
add_executable(${PROJECT_NAME}_node src/offboard_node.cpp)
target_link_libraries(${PROJECT_NAME}_node
${catkin_LIBRARIES}
)
4.开始编译
cd ~/uav_test_ws
catkin_make
5.把编译成功生成的一个可执行文件移动到包目录下(offboard的目录下面)
这个生成的可执行文件的位置,可以看一下编译成功后最后输出的那几行里面有。
不然的话,你可以试一下不移动,然后继续操作下面的步骤(因为教程里面就没有给出这一步)会提示找不到找不到这个文件的位置,可是明明编译成功而且有的呀,让你发狂吧,就这个搞了我好久,气死我了!!!
6.添加环境
echo "source ~/uav_test_ws/devel/setup.bash" >> ~/.bashrc
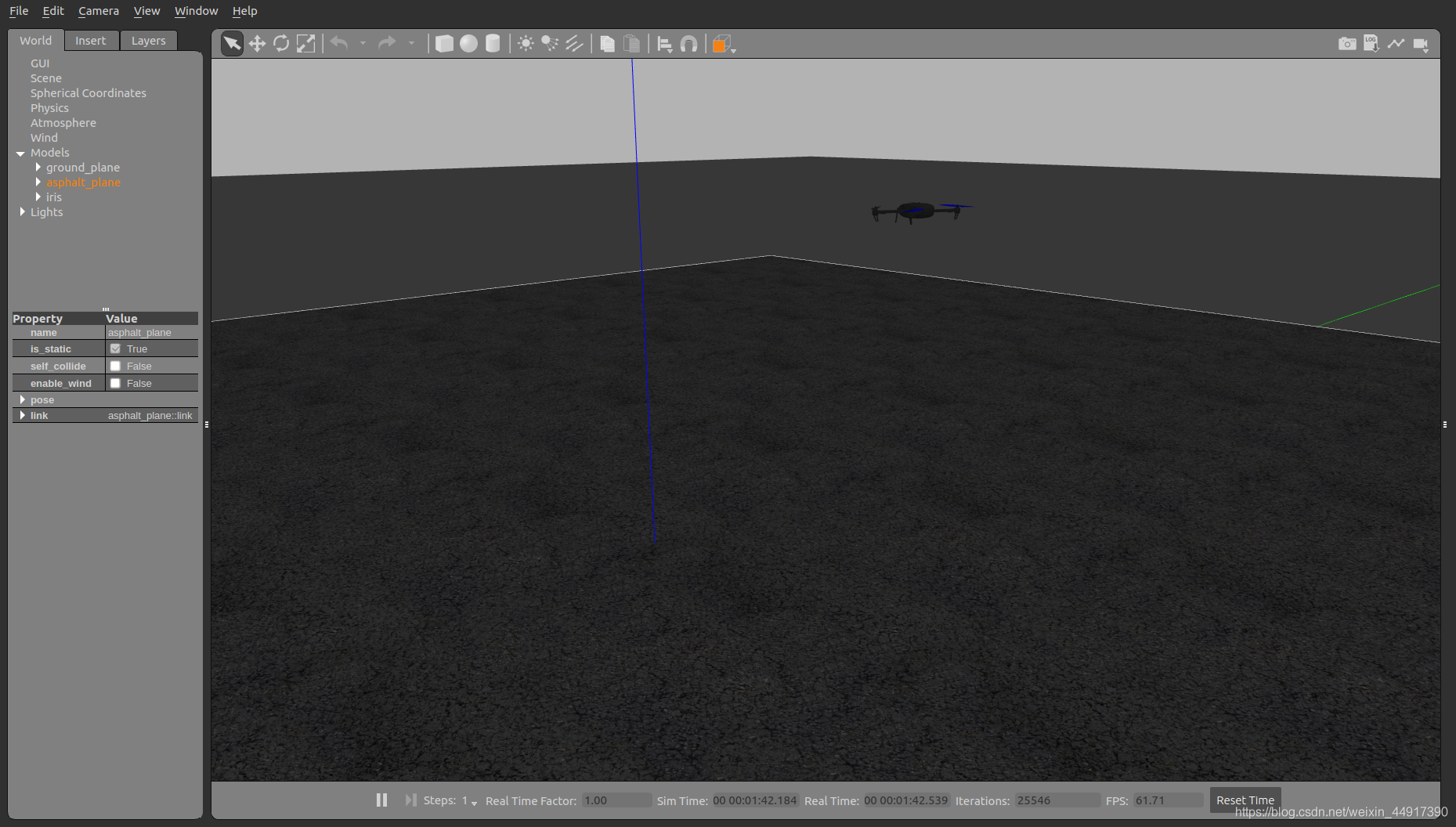
开始仿真
1.打开一个terminal,启动飞机的gazebo仿真
cd Firmware
make px4_sitl gazebo
2.打开一个terminal,运行mavros
roslaunch mavros px4.launch fcu_url:="udp://:14540@127.0.0.1:14557"
注意注意,这个在自己打的时候千万要注意不能多打或者少打空格、数字、点、引号,不然会报错说你的FCU URL有问题!!!
因为我错过,而且重点还是看不出来根本不知道自己到底哪里错了!!!
3.打开一个terminal,运行外部控制节点
rosrun offboard offboard_node
要是有问题的话,说找不到什么的,建议你找一找前面的内容!
成功的话:
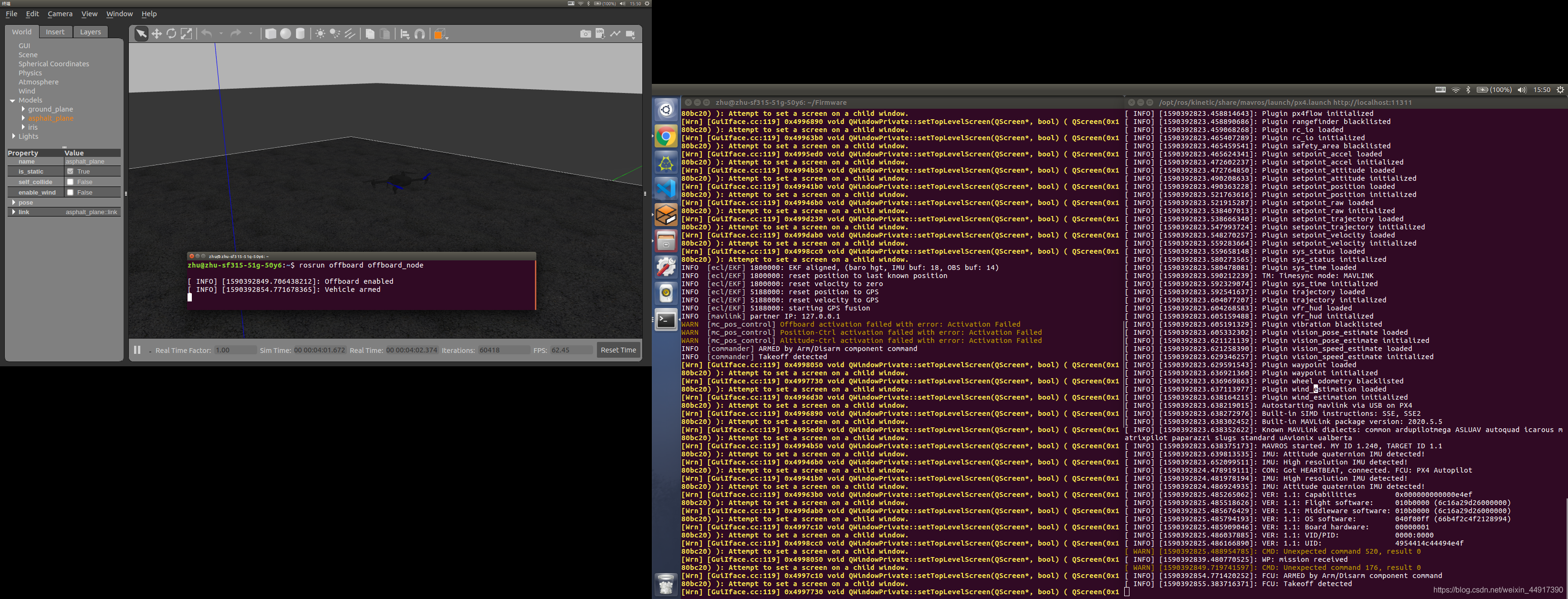
(两个屏幕看起来炒鸡爽的!!!)
三、介绍Python代码控制方法
官网有言:本示例使用 C++。 Python 中的类似示例可以在这里找到: integrationtests/python_src/px4_it/mavros。
其实我们下载的px4固件里面的Firmware里面有相同的文件
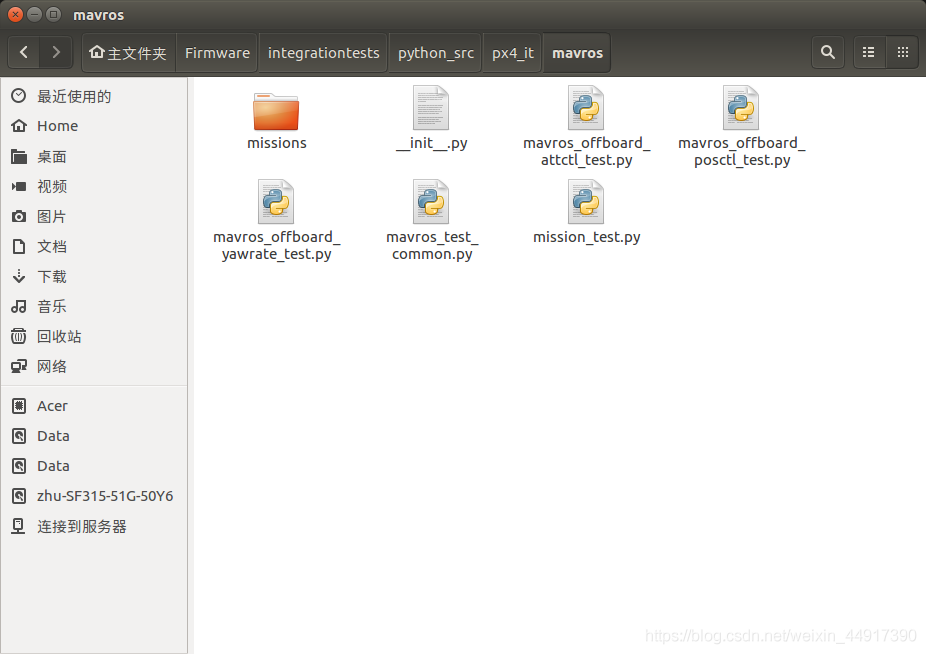
然后在offboard文件中创建一个script文件来存放Python文件,再把这里的所有的文件都拷贝进去
在运行Python之前都要注意这个Python文件是不是可执行文件,不然的话:
chmod 777 filename
接着:
one:
cd Firmware
make px4_sitl gazebo
two:
roslaunch mavros px4.launch fcu_url:="udp://:14540@127.0.0.1:14557"
three:
rosrun offboard mavros_offboard_attctl_test.py
飞机动一下翅膀报错...
or
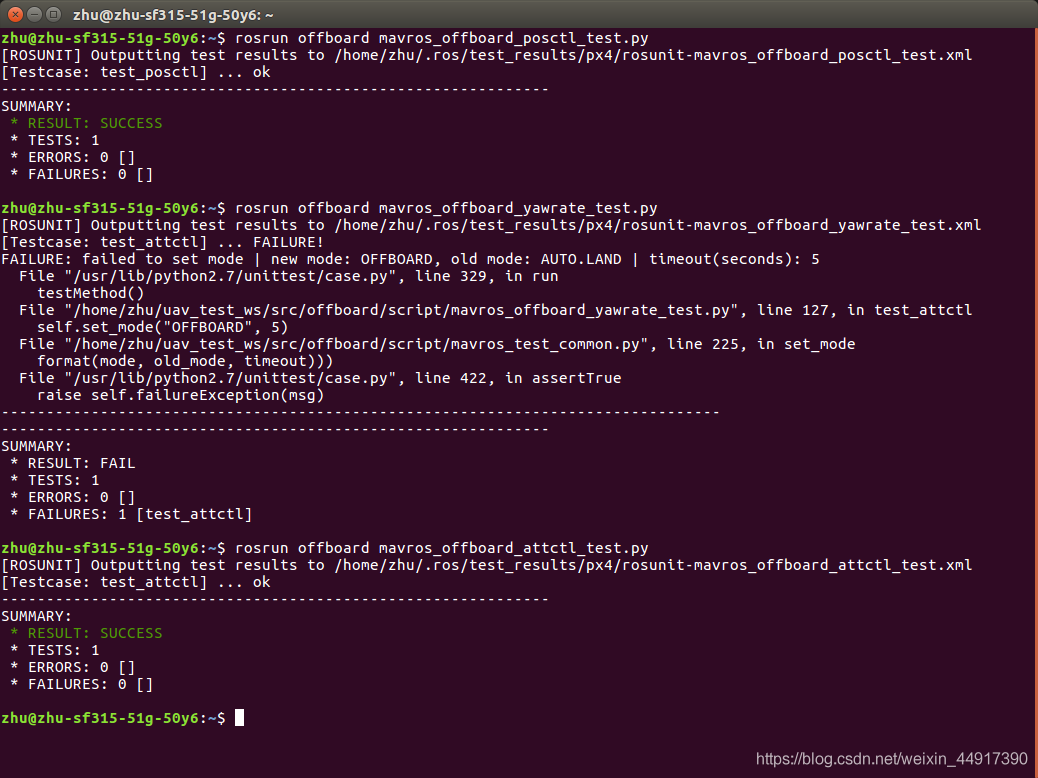
rosrun offboard mavros_offboard_posctl_test.py
飞机绕大圈,回到原点...
or
rosrun offboard mavros_offboard_yawrate_test.py
飞机一直飞向远方,不在回家...
问题一:什么东西没有装的包,报错
要什么装什么就行了,但是,其中有一个库,叫做basemap,是个钉子户(库),可能不是必须的,但是我还没装成功
问题二:有些程序可以运行,但是有些运行会报错
具体的错误以后学了应该是看得懂的吧,反正现在这个文件mavros_offboard_yawrate_test.py是不ok的,现在看那些错误还是比较懵逼的了!
大家要是有一些错误可以直接看出来的话,还麻烦我们在评论区交流学习,thanks~
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)