realsense SDK的安装
https://github.com/IntelRealSense/librealsense/blob/master/doc/distribution_linux.md https://github.com/IntelRealSense/librealsense/blob/master/doc/distribution_linux.md
https://github.com/IntelRealSense/librealsense/blob/master/doc/distribution_linux.md
参考官方文档,sudo apt-get install librealsense2-dkms 在ARM架构下可以忽略。
sdk安装成功后,运行 realsense-viewer,测试相机。
接下来,安装realsense-ros
sudo apt install ros-melodic-realsense2-camera
若出现已下报错:
realsense t265 add-apt-repository 403 Forbidden
1. sudo gedit /etc/apt/sources.list
将realsense的关联仓库删掉
cd /etc/apt/sources.list.d
sudo rm **realsense**
OpenCV 版本问题
某些ARM载板上,预装了opencv4,可以选择性的重新安装opencv3。查看一下版本号:
pkg-config opencv --modversion
卸载原有的OpenCV。不要着急执行命令,ros用户注意一下autoremove会将ros删除
sudo apt-get purge libopencv*
sudo apt autoremove //选择性执行
sudo apt-get update
下载opencv源码 官网:Releases - OpenCV
安装依赖
sudo apt-get install build-essential libgtk2.0-dev libavcodec-dev libavformat-dev libjpeg-dev libswscale-dev libtiff5-dev
sudo apt-get install libgtk2.0-dev
sudo apt-get install pkg-config
编译
cd opencv_x.x.x
mkdir build
cd build
cmake -D CMAKE_BUILD_TYPE=RELEASE -D CMAKE_INSTALL_PREFIX=/usr/local ..
make -j4
sudo make install
VINS 安装
https://github.com/HKUST-Aerial-Robotics/VINS-Fusionhttps://github.com/HKUST-Aerial-Robotics/VINS-Fusion
Installation — Ceres Solverhttp://ceres-solver.org/installation.html
根据HKUST github的要求,需要预先安装ceres。个人测试只要选择 latest stable release
不要选 github的下载链接,在ARM 和 X86的安装都是没问题的。
因为vins用到了cv_bridge,若出现以下报错需要修改其配置:
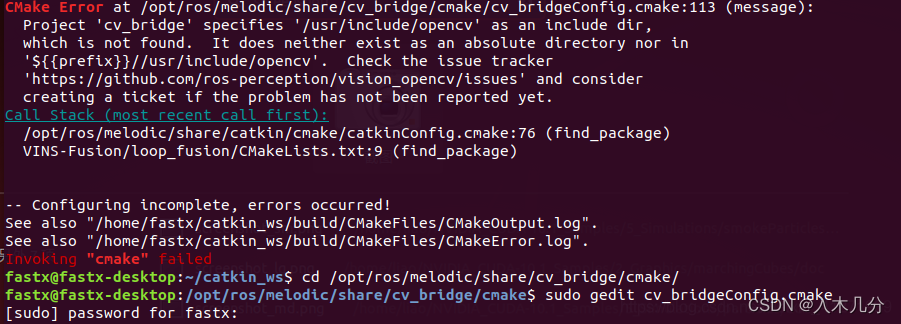
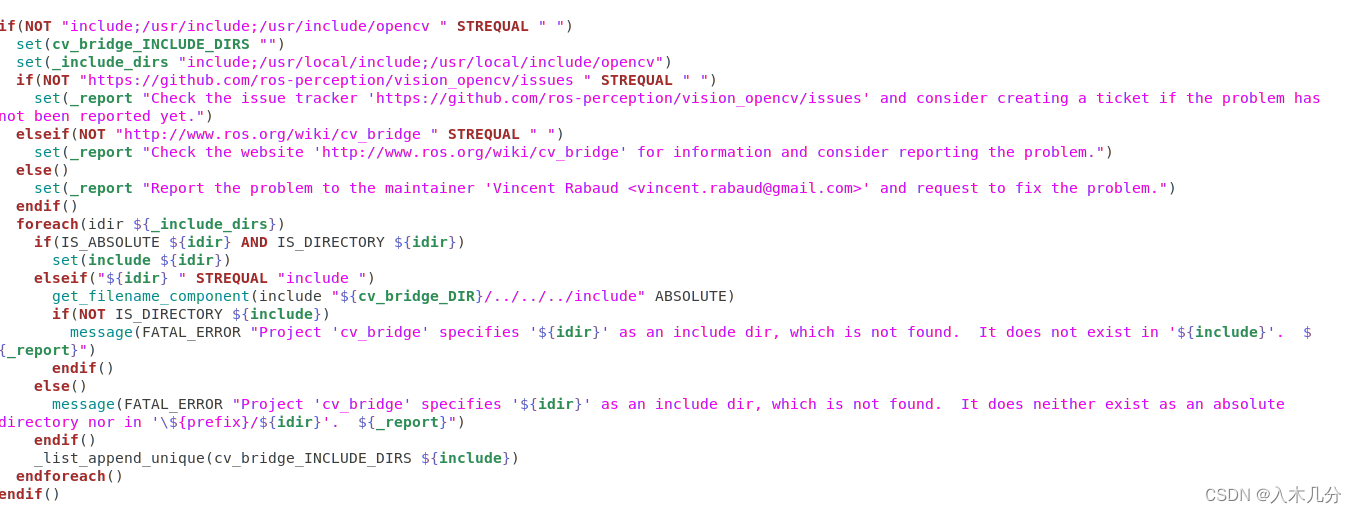
如果是源码安装opencv,需要修改一下/opt/ros/melodic/share/cv_bridge/cv_bridgeConfig.cmake中include的路径。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)