一、简介
字符设备是 Linux 驱动中最基本的一类设备驱动,字符设备就是一个一个字节,按照字节
流进行读写操作的设备,读写数据是分先后顺序的。比如我们最常见的点灯、按键、 IIC、 SPI,
LCD 等等都是字符设备,这些设备的驱动就叫做字符设备驱动。

驱动加载成功以后会在“/dev”目录下生成一个相应的文件,应用程序通过对这个名为“/dev/xxx” (xxx 是具体的驱动文件名字)的文件进行相应的操作即可实现对硬件的操作。

Linux 驱动有两种运行方式,第一种就是将驱动编译进 Linux 内核中,这样当 Linux 内核启动的时候就会自动运行驱动程序。第二种就是将驱动编译成模块(Linux 下模块扩展名为.ko),在Linux 内核启动以后使用“modprobe”或者“insmod”命令加载驱动模块。
在原子哥教程中,统一采用模块式开发,使用modprobe命令挂载(因为insmod不能解决模块的依赖关系),好处是开发方便,修改完驱动代码后只需要编译模块即可,不用编译整个Linux代码。当驱动开发完毕确认无误后再编译进Linux内核中。
二、设备驱动组成
1.一个简单的字符设备驱动模板:
/* 打开设备 */
static int chrtest_open(struct inode *inode, struct file *filp)
{
/* 用户实现具体功能 */
return 0;
}
/* 从设备读取 */
static ssize_t chrtest_read(struct file *filp, char __user *buf, size_t cnt, loff_t *offt)
{
/* 用户实现具体功能 */
return 0;
}
/* 向设备写数据 */
static ssize_t chrtest_write(struct file *filp, const char __user *buf, size_t cnt, loff_t *offt)
{
/* 用户实现具体功能 */
return 0;
}
/* 关闭/释放设备 */
static int chrtest_release(struct inode *inode, struct file *filp)
{
/* 用户实现具体功能 */
return 0;
}
static struct file_operations test_fops = {
.owner = THIS_MODULE,
.open = chrtest_open,
.read = chrtest_read,
.write = chrtest_write,
.release = chrtest_release,
};
/* 驱动入口函数 */
static int __init xxx_init(void)
{
/* 入口函数具体内容 */
int retvalue = 0;
/* 注册字符设备驱动 */
retvalue = register_chrdev(200, "chrtest", &test_fops);
if(retvalue < 0){
/* 字符设备注册失败,自行处理 */
//.....
}
return 0;
}
/* 驱动出口函数 */
static void __exit xxx_exit(void)
{
/* 注销字符设备驱动 */
unregister_chrdev(200, "chrtest");
}
/* 将上面两个函数指定为驱动的入口和出口函数 */
module_init(xxx_init);
module_exit(xxx_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("name");
里面定义了一个file_operations结构体,用于描述设备的操作函数,包括open、read、write、release等。__init和__exit为设备的挂载和卸载函数,隐式声明并在模块的启动时调用。最后还要注入使用的协议和作者信息。
2.设备号
Linux 中每个设备都有一个设备号,设备号由主设备号和次设备号两部分组成,主设备号表示某一个具体的驱动,次设备号表示使用这个驱动的各个设备。Linux使用一个dev_t变量表示设备号,dev_t 其实就是 unsigned int 类型,是一个 32 位的数据类型。这 32 位的数据构成了主设备号和次设备号两部分,其中高 12 位为主设备号,低 20 位为次设备号。因此 Linux系统中主设备号范围为 0~4095。
设备号的分配有静态分配和动态分配两种,Linux社区推荐使用动态分配。使用alloc_chrdev_region()和unregister_chrdev_region()申请和释放。
int alloc_chrdev_region(dev_t *dev, unsigned baseminor, unsigned count, const char *name)
/*
dev:保存申请到的设备号。
baseminor: 次设备号起始地址, alloc_chrdev_region 可以申请一段连续的多个设备号,这
些设备号的主设备号一样,但是次设备号不同,次设备号以 baseminor 为起始地址地址开始递
增。一般 baseminor 为 0,也就是说次设备号从 0 开始。
count: 要申请的设备号数量。
name:设备名字。
*/
void unregister_chrdev_region(dev_t from, unsigned count)
/*
from:要释放的设备号。
count:表示从 from 开始,要释放的设备号数量
*/
三、chrdevbase字符设备开发实验
按照原子哥教程配置VSCode开发环境,有兴趣的可以在Windows下配置远程开发环境连接到虚拟机下进行开发,配置较繁琐但使用起来更方便。此外根据个人喜好修改代码颜色。
接下来就是编写实验程序,一开始学习建议自己手敲,并理解代码的构成方式。
#include <linux/types.h>
#include <linux/kernel.h>
#include <linux/delay.h>
#include <linux/ide.h>
#include <linux/init.h>
#include <linux/module.h>
#define CHRDEVBASE_MAJOR 200 /* 主设备号 */
#define CHRDEVBASE_NAME "chrdevbase" /*设备名*/
static char readbuf[100];
static char writebuf[100];
static char kerneldata[] = {"kernel data!"};
/*
* @description : 打开设备
* @param – inode : 传递给驱动的 inode
* @param - filp : 设备文件, file 结构体有个叫做 private_data 的成员变量
* 一般在 open 的时候将 private_data 指向设备结构体。
* @return : 0 成功;其他 失败
*/
static int chrdevbase_open(struct inode *inode, struct file *filp)
{
printk("chrdevbase open!\r\n");
return 0;
}
/*
* @description : 从设备读取数据
* @param - filp : 要打开的设备文件(文件描述符)
* @param - buf : 返回给用户空间的数据缓冲区
* @param - cnt : 要读取的数据长度
* @param - offt : 相对于文件首地址的偏移
* @return : 读取的字节数,如果为负值,表示读取失败
*/
static ssize_t chrdevbase_read(struct file *filp, char __user *buf, size_t cnt, loff_t *offt)
{
int retvalue=0;
/*向用户空间发送数据*/
memcpy(readbuf, kerneldata, sizeof(kerneldata));
retvalue = copy_to_user(buf, readbuf, cnt);
if(retvalue == 0){
printk("kerneldata senddata ok!\r\n");
} else {
printk("kerneldata senddata failed!\r\n");
}
printk("chrdevbase read!\r\n");
return 0;
}
/*
* @description : 向设备写数据
* @param - filp : 设备文件,表示打开的文件描述符
* @param - buf : 要写给设备写入的数据
* @param - cnt : 要写入的数据长度
* @param - offt : 相对于文件首地址的偏移
* @return : 写入的字节数,如果为负值,表示写入失败
*/
static ssize_t chrdevbase_write(struct file *filp, const char __user *buf, size_t cnt, loff_t *offt)
{
int retvalue = 0;
/*接收用户空间传递给内核的数据并打印*/
retvalue = copy_from_user(writebuf, buf, cnt);
if(retvalue == 0){
printk("kernel recevdata:%s\r\n", writebuf);
} else {
printk("kernel recevdata failed!\r\n");
}
return 0;
}
/*
* @description : 关闭/释放设备
* @param - filp : 要关闭的设备文件(文件描述符)
* @return : 0 成功;其他 失败
*/
static int chrdevbase_release(struct inode *inode, struct file *filp)
{
printk("chrdevbase release!\r\n");
return 0;
}
/*
*设备操作函数结构体
*/
static struct file_operations chrdevbase_fops = {
.owner = THIS_MODULE,
.open = chrdevbase_open,
.read = chrdevbase_read,
.write = chrdevbase_write,
.release = chrdevbase_release,
};
/*
* @description : 驱动入口函数
* @param : 无
* @return : 0 成功;其他 失败
*/
static int __init chrdevbase_init(void)
{
int retvalue = 0;
/*注册字符设备驱动*/
retvalue = register_chrdev(CHRDEVBASE_MAJOR, CHRDEVBASE_NAME, &chrdevbase_fops);
if(retvalue < 0){
printk("chrdevbase driver register failed!\r\n");
}
printk("chrdevbase_init()\r\n");
return 0;
}
/*
* @description : 驱动出口函数
* @param : 无
* @return : 无
*/
static void __exit chrdevbase_exit(void)
{
/*注销字符设备驱动*/
unregister_chrdev(CHRDEVBASE_MAJOR, CHRDEVBASE_NAME);
printk("chrdevbase_exit()\r\n");
}
/*将入口和出口函数指定为驱动的入口和出口*/
module_init(chrdevbase_init);
module_exit(chrdevbase_exit);
/*LISENCE和作者信息*/
MODULE_LICENSE("GPL");
MODULE_AUTHOR("Amonter");
MODULE_INFO(intree, "Y");
与模板中的格式及总体信息基本相同。其中printk()为内核态的printf(),有8个消息输出级别,0的级别最高,7的级别最低,默认级别为7。在Linux Kernel的图形化配置界面中可以在Kernel hacking->printk and dmesg options路径下,设置Default console loglevel的值来设置默认终端消息级别,设置Default message loglevel来设置默认消息级别。
#define KERN_SOH "\001"
#define KERN_EMERG KERN_SOH "0" /* 紧急事件,一般是内核崩溃 */
#define KERN_ALERT KERN_SOH "1" /* 必须立即采取行动 */
#define KERN_CRIT KERN_SOH "2" /* 临界条件,比如严重的软件或硬件错误*/
#define KERN_ERR KERN_SOH "3" /* 错误状态,一般设备驱动程序中使用KERN_ERR报告硬件错误 */
#define KERN_WARNING KERN_SOH "4" /* 警告信息,不会对系统造成严重影响 */
#define KERN_NOTICE KERN_SOH "5" /* 有必要进行提示的一些信息 */
#define KERN_INFO KERN_SOH "6" /* 提示性的信息 */
#define KERN_DEBUG KERN_SOH "7" /* 调试信息
四、编写测试APP
#include <stdio.h>
#include "unistd.h"
#include "sys/types.h"
#include "sys/stat.h"
#include "fcntl.h"
#include "string.h"
#include "stdlib.h"
static char userdata[] = {"user data!"};
int main(int argc, char *argv[])
{
int fd, retvalue;
char *filename;
char readbuf[100], writebuf[100];
if(argc != 3){
printf("Error Usage!\r\n");
return -1;
}
filename = argv[1];
/*打开驱动文件*/
fd = open(filename, O_RDWR);
if(fd < 0){
printf("Can't open file %s\r\n", filename);
return -1;
}
if(atoi(argv[2]) == 1){
/*从驱动文件读取数据*/
retvalue = read(fd, readbuf, 50);
if(retvalue < 0){
printf("read file %s failed!\r\n", filename);
} else {
/*读取成功,打印出读取结果*/
printf("read data %s\r\n", readbuf);
}
}
if(atoi(argv[2]) == 2){
/*向设备驱动写数据*/
memcpy(writebuf, userdata, sizeof(userdata));
retvalue = write(fd, writebuf, 50);
if(retvalue < 0){
printf("write file %s failed!\r\n", filename);
}
}
/*关闭设备*/
retvalue = close(fd);
if(retvalue < 0){
printf("Can't close file %s\r\n", filename);
return -1;
}
return 0;
}
在运行时可以输入以下的命令示例来对设备进行操作。命令一共有三个参数“./chrdevbaseApp”、“/dev/chrdevbase”和“1”,这三个参数分别对应 argv[0]、 argv[1]和 argv[2]。第一个参数表示运行 chrdevbaseAPP 这个软件,第二个参数表示测试APP要打开/dev/chrdevbase这个设备。第三个参数就是要执行的操作, 1表示从chrdevbase中读取数据, 2 表示向 chrdevbase 写数据。
/chrdevbaseApp /dev/chrdevbase 1
五、编译驱动程序和测试App
1.首先编译设备驱动程序
需要将chedevbase.c文件编译成.ko模块。在同级目录下创建Makefile,内容如下。
KERNELDIR := ~/my_linux/linux-5.5.15 #注意修改路径,建议用绝对路径
CURRENT_PATH := $(shell pwd)
obj-m := chrdevbase.o
build: kernel_modules
kernel_modules:
$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) modules
clean:
$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) clean
在这里遇到一个编译错误,使用Linux5.15内核,编译过程中会找不到头文件<linux/ide.h>,查找Linux5.15版本的内核资料,发现原因是5.15版本的内核对设备块部分做出了较大修改。鉴于目前没有相关的教程,直接手动添加ide.h文件也不太现实。在此建议使用V2.4版本-Linux5.10以前的STM32固件包,就是V2.0或V2.2固件版本,变动不大,使用起来更方便。这里就先使用原子哥资料中的01、程序源码-->教程Linux系统源码中的Linux5.4版本内核。
更换内核后,修改VSCode环境中的头文件路径,更改Makefile中的路径,然后编译出chrdevbase.ko,测试App程序只有一个源文件,使用交叉编译工具单独编译:
arm-none-linux-gnueabihf-gcc chrdevbaseApp.c -o chrdevbaseApp
编译出的文件如下:

六、运行测试
①设置开发板U-Boot中的启动参数:
将bootcmd修改为从tftp服务器加载镜像和设备树启动:
#设置内核启动命令
setenv bootcmd 'tftp c2000000 uImage;tftp c4000000 stm32mp157d-atk.dtb;bootm c2000000 - c4000000'
#如果只想在本次生效可以不保存
saveenv
将启动参数bootargs修改为挂载网络文件系统:
#设置bootargs,其中格式nfsroot=serverip:nfs_pwd,ip=board_ip:server_ip:gatewayip....
setenv bootargs 'console=ttySTM0,115200 root=/dev/nfs nfsroot=192.168.68.221:/home/amonter/linux/nfs/rootfs,proto=tcp rw ip=192.168.68.226:192.168.68.221:192.168.68.1:255.255.255.0::eth0:off'
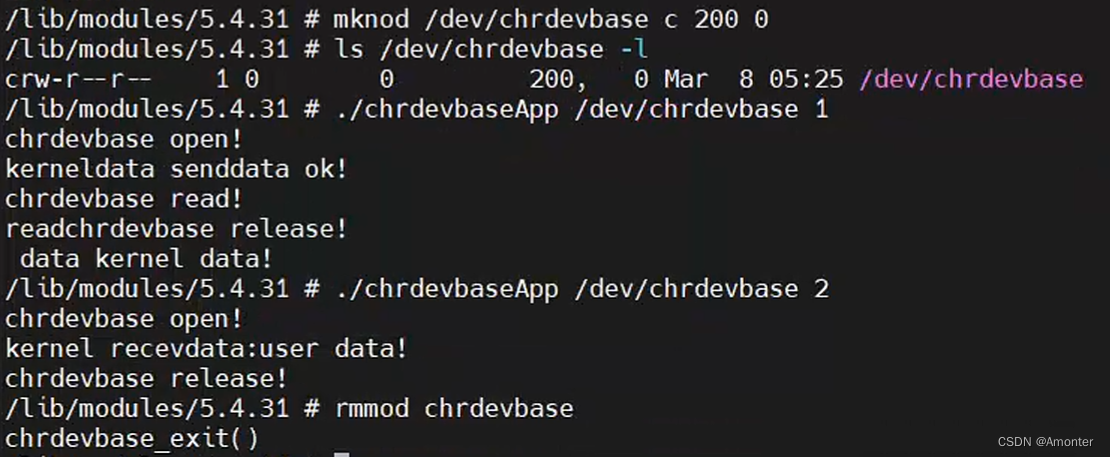
检查根文件系统中是否有/lib/modules/5.4.31目录,没有的话需要手动创建,然后将编译出的.ko文件和App文件复制进去。然后使用如下命令进行测试。
#挂载驱动模块(不加.ko后缀)
modprobe chrdevbase
#查看系统已有模块
lsmod
#查看系统中有哪些设备
cat /proc/devices
#创建设备节点文件
mknod /dev/chrdevbase c 200 0
#App测试
./chrdevbaseApp /dev/chrdevbase 1
#卸载驱动模块
rmmod chrdevbase
其中“mknod”是创建节点命令,“/dev/chrdevbase”是要创建的节点文件,“c”表示这是个
字符设备,“ 200”是设备的主设备号,“ 0”是设备的次设备号。主设备可以在驱动代码中指定,也可以使用动态分配生成,在cat /proc/devices命令中可以查询到。App测试命令,参数1为读取,2为写入。

本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)